ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ ЗНАЧЕНИЙ СТАТИЧЕСКИХ МОМЕНТОВ И МОМЕНТА ИНЕРЦИИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
РАСЧЁТ И ВЫБОР ЭЛЕМЕНТОВ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОПРИВОДА
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРИ РЕКУПЕРАТИВНОМ ТОРМОЖЕНИИ
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
Момент и скорость уменьшаются до 0 на характеристики динамического торможения
РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ ЭЛЕКТРОПРИВОДА, ОПИСАНИЕ ЕЁ РАБОТЫ
Навигация
РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
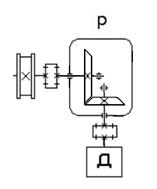
Электропривод литейного крана по схеме "Преобразователь частоты – асинхронный короткозамкнутый двигатель"
34060
знаков
10
таблиц
9
изображений
5. РАСЧЁТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ МАКСИМАЛЬНОМ, СРЕДНЕМ И МИНИМАЛЬНОМ ЗНАЧЕНИЯХ СКОРОСТИ ДВИЖЕНИЯ
При расчёте искусственных характеристик двигателя необходимо воспользоваться условием задания:
![]() ,
,
![]() .
.
При этом частоты преобразователя, обеспечивающие работу на максимальной скорости при различных моментах, будут также различны
При частотном регулировании жесткость МХ остаётся постоянной:
![]() .
.
Подобным выражением можно воспользоваться при определении синхронной скорости вращения, соответствующей максимальной скорости при различных моментах:
Минимальный статический момент:
![]()
Максимальный статический момент:
![]()
Соответствующие данным синхронным скоростям частоты:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Сопротивление короткого замыкания:
![]() .
.
Коэффициенты ![]() и
и ![]() :
:
![]() ,
, ![]() .
.
Относительная частота:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]()
Относительное напряжение на статоре:
Минимальный статический момент:

 .
.
Максимальный статический момент:
При увеличении частоты вверх от номинала необходимо также увеличить и напряжение на статоре, но это не допустимо. Значит, относительное напряжение будет равно 1:
![]() .
.
Это приведёт к снижению момента. В таком случае работа двигателя будет возможна при выполнении условия:
![]() .
.
Напряжение на выходе преобразователя:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Критическое скольжение:
Минимальный статический момент:

Максимальный статический момент:

Критический момент двигателя:
Минимальный статический момент:


Максимальный статический момент:


Проверка условия:
![]() ;
;
![]() .
.
Как видно, условие выполняется.
Коэффициент a:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Момент рассчитываем по формуле Клосса:
Минимальный статический момент:
 .
.
Максимальный статический момент:
 .
.
Скорость электродвигателя:
Минимальный статический момент:
![]()
Минимальный статический момент:
![]() .
.
Результаты расчётов:
Таблица 5.1 – расчёт ИХ при максимальной частоте при минимальном моменте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 150.7 | 135.6 | 120.6 | 105.5 | 90.42 | 75.35 | 60.28 | 45.21 | 30.14 | 15.07 | 0 |
|
| 0 | 327.4 | 509.5 | 578 | 584.1 | 561.9 | 529.1 | 493.8 | 459.6 | 428 | 399.327 |
Таблица 5.2 – расчёт ИХ при максимальной частоте при максимальном моменте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 162.6 | 146.4 | 130.1 | 113.8 | 97.58 | 81.32 | 65.05 | 48.79 | 32.53 | 16.26 | 0 |
|
| 0 | 323.7 | 493.2 | 547.7 | 543.9 | 516.1 | 480.9 | 445.3 | 411.9 | 381.7 | 354.8 |
Аналогичными будут расчёты при построении МХ при минимальной частоте.
Синхронная частота вращения при различных моментах:
Минимальный статический момент:
![]()
Максимальный статический момент:
![]()
Соответствующие данным синхронным скоростям частоты:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Относительная частота:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]()
Относительное напряжение на статоре:
Минимальный статический момент:

 .
.
Максимальный статический момент:
![]()

Напряжение на выходе преобразователя:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Критическое скольжение:
Минимальный статический момент:

Максимальный статический момент:

Критический момент двигателя:
Минимальный статический момент:


Максимальный статический момент:


Коэффициент a:
Минимальный статический момент:
![]() .
.
Максимальный статический момент:
![]() .
.
Момент рассчитываем по формуле Клосса:
Минимальный статический момент:
 .
.
Максимальный статический момент:

Скорость электродвигателя:
Минимальный статический момент:
![]()
Минимальный статический момент:
![]() .
.
Результаты расчётов:
Таблица 5.3 – расчёт ИХ при минимальной частоте при минимальном моменте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 38.71 | 34.84 | 30.96 | 27.09 | 23.22 | 19.35 | 15.48 | 11.61 | 7.741 | 3.871 | 0 |
|
| 0 | 149.4 | 267.3 | 358.7 | 428.3 | 480.5 | 518.8 | 546.1 | 564.8 | 576.8 | 583 |
Таблица 5.4 – расчёт ИХ при минимальной частоте при максимальном моменте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 50.64 | 45.57 | 40.51 | 35.44 | 30.38 | 25.32 | 20.25 | 15.19 | 10.13 | 5.064 | 0 |
|
| 0 | 150.5 | 276.0 | 375.4 | 450.8 | 505.4 | 542.9 | 566.8 | 580.4 | 586 | 585 |
Нет необходимости делать подобный расчёт при средних частотах, так как на подобную скорость не накладывается никаких ограничений.
Синхронная частота вращения:
![]() .
.
Частота на выходе преобразователя:
![]() .
.
Относительная частота:
![]() .
.
Относительное напряжение на статоре:


Напряжение на выходе преобразователя:
![]() .
.
Критическое скольжение:
 .
.
Критический момент двигателя:


Коэффициент a:
![]() .
.
Момент рассчитываем по формуле Клосса:
 .
.
Скорость электродвигателя:
![]()
Результаты расчётов:
Таблица 5.5 – расчёт ИХ при первой средней частоте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 125.3 | 112.8 | 100.2 | 87.71 | 75.18 | 62.65 | 50.12 | 37.59 | 25.06 | 12.53 | 0 |
|
| 0 | 288.8 | 468.6 | 556.4 | 585.17 | 581.5 | 561.7 | 535.0 | 506.2 | 477.6 | 450.3 |
Синхронная частота вращения:
![]() .
.
Частота на выходе преобразователя:
![]() .
.
Относительная частота:
![]() .
.
Относительное напряжение на статоре:


Напряжение на выходе преобразователя:
![]() .
.
Критическое скольжение:
 .
.
Критический момент двигателя:


Коэффициент a:
![]() .
.
Момент рассчитываем по формуле Клосса:
 .
.
Скорость электродвигателя:
![]()
Результаты расчётов:
Таблица 5.6 – расчёт ИХ при второй средней частоте
|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
|
| 88 | 79.2 | 70.4 | 61.6 | 52.8 | 44 | 35.2 | 26.4 | 17.6 | 8.8 | 0 |
|
| 0 | 228.7 | 391.1 | 494.2 | 552.3 | 579.5 | 586.5 | 581.1 | 568.4 | 551.5 | 532.5 |
Построим все рассчитанные ИХ. На рисунке указаны максимальное и минимальное значение скорости, максимальный и минимальный статический момент, а также ИХ при различных частотах.
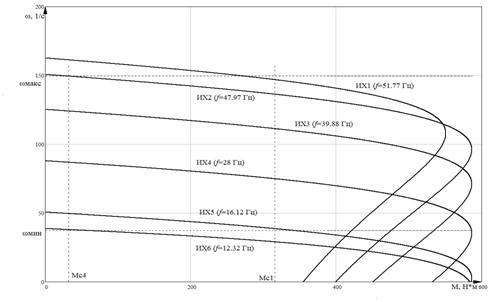
Рисунок 5.1 – Графики ИХ при различных частотах
Таким образом, при расчёте данных характеристик учитывалось ограничение задания:
![]() ,
,
![]() .
.
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...
... управляют последовательностью их действия и обеспечивают отвод жидкости из сливных полостей в бак. Кроме того, распределительные устройства реверсируют гидродвигатели и регулируют их скорость. В гидросистемах строительных машин применяют главным образом золотниковые распределители. По числу присоединенных каналов золотниковые распределители делят на двух-, трех- и четырехходовые. Для управления ...
... сети, тип выбранной КТП, ее комплектацию и компоновку. 3.6 Выбор схемы силовой сети цеха Внутрицеховые сети выполняют по радиальной, магистральной или смешанной схемам. На выбор схемы влияют категория потребителей по надежности электроснабжения, взаимное расположение ЭП по площади цеха, их единичная мощность, связанность электроприемников единым технологическим процессом и характеристика ...
... В помещениях электролизного производства, в том числе на преобразовательной подстанции, должна предусматриваться громкоговорящая и (или) телефонная связь, в соответствии с принятой системой обслуживания на предприятии (опытно-промышленной установке). 7.10.39. Для контроля за режимом работы серии ванн в помещениях корпусов, станций (цехов) электролиза или на преобразовательной подстанции должны ...
0 комментариев