Навигация
Определение ускорений точек механизма методом планов ускорений
29792
знака
1
таблица
1
изображение
2.6 Определение ускорений точек механизма методом планов ускорений
При помощи планов ускорений можно найти ускорения любых точек механизма. Для построения планов ускорений по аналогии с планами скоростей следует пользоваться их свойствами. Свойства такие же, как и у планов скоростей, кроме третьего, где фигура, подобная одноименной жесткой фигуре на плане положений механизма, повернута на угол (180° – j¢) в сторону мгновенного ускорения e данного звена,
где ![]() . (2.21)
. (2.21)
Поскольку полные относительные ускорения состоят из геометрической суммы тангенциальных и нормальных составляющих, то концы векторов абсолютных ускорений обозначают буквами, соответствующими названию точек.
Считая известными ускорения шарнирных точек
(аО![]() = аО
= аО![]() = 0), помещаем их на плане ускорений в полюсе рa. Звено О1А вращается равномерно, поэтому точка А имеет только нормальное ускорение
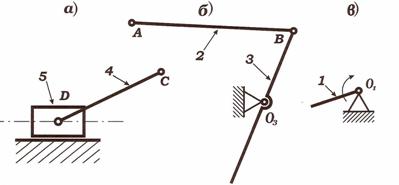
= 0), помещаем их на плане ускорений в полюсе рa. Звено О1А вращается равномерно, поэтому точка А имеет только нормальное ускорение ![]() , которое направлено по звену О1А к центру вращения О1 (см. рис. 2.3, в). Определяем его по формуле, м/с2 :
, которое направлено по звену О1А к центру вращения О1 (см. рис. 2.3, в). Определяем его по формуле, м/с2 :
![]() ;
; ![]() . (2.22)
. (2.22)
Принимаем (произвольно) длину отрезка ![]() , изображающего вектор ускорения
, изображающего вектор ускорения ![]() точки А, равной 180 мм. Тогда масштаб плана ускорений, м/с2×мм-1,
точки А, равной 180 мм. Тогда масштаб плана ускорений, м/с2×мм-1,
![]() ;
; ![]() . (2.23)
. (2.23)
Из полюса плана ра откладываем ![]() параллельно звену О1А в направлении от А к О1.
параллельно звену О1А в направлении от А к О1.
Рассматривая движения точки В со звеном АВ, составляем векторное уравнение:
 , (2.24)
, (2.24)
в котором ускорение точки А известно по значению и направлению. Определяем нормальное ускорение точки В относительно А, м/с2 ,

 ; (2.25)
; (2.25)

 .
.
От точки а плана ускорений параллельно звену АВ в направлении от точки В к точке А откладываем вектор ![]() , изображающий ускорение аВАn , величина которого:
, изображающий ускорение аВАn , величина которого:
![]() ;
;  мм (2.26)
мм (2.26)
Через точку n1 проводим перпендикулярно звену АВ линию действия тангенциального ускорения аВАф. Из точки О2 плана ускорений параллельно звену О2В в направлении от В к О2 откладываем вектор ![]() , изображающий ускорение аВО2n, величина которого:
, изображающий ускорение аВО2n, величина которого:

 мм (2.27)
мм (2.27)
Через точку n2 проводим перпендикулярно звену О2В линию действия тангенциального ускорения аВО2ф . На их пересечении получится точка В – кон
ец вектора ![]() изображающего ускорение аВ точки В механизма, м/с2:
изображающего ускорение аВ точки В механизма, м/с2:
![]()
![]() . (2.28)
. (2.28)
Определяем тангенциальные ускорения и относительные во вращении вокруг точек А и О2, м/с2:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]()
![]() (2,29)
(2,29)
![]()
![]()
Положение точки С на плане ускорений находим по свойству подобия (из пропорции):
![]() ;
;  мм. (2.30)
мм. (2.30)
Соединив ее с полюсом, определяем ускорение точки С, м/с2:
![]()
![]() . (2.31)
. (2.31)
Величины ускорений центров тяжести звеньев S1, S2, S3, м/с2:
![]()
![]() ;
;
![]()
![]() ; (2.32)
; (2.32)
![]()
![]()
Определения ускорения точки D рассматриваем движения точки D со звеньями СD. Составляем векторные уравнения:
![]() ; (2.33)
; (2.33)
Определяем нормальное ускорение точки D (ускорение точки С известно по значению и направлению), м/с2:

 . (2.34)
. (2.34)
На плане ускорений ![]() можно выразить:
можно выразить:
 мм (2.35)
мм (2.35)
Отложим его параллельно звену CD на плане из точки С в направлении от D к С, а затем перпендикулярно звену CD провести линию действия тангенциального ускорения до пересечения с линией хода ползуна (это будет точка D).
Определим величины ускорений точек D, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , м/с2:
, м/с2:
![]()
![]() ;
;
![]()
![]() (2.36)
(2.36)
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
Определяем угловые ускорения звеньев.
Угловое ускорение e1 ведущего звена О1А, совершающего равномерное движение, равно нулю.
Угловое ускорение звена 2, с-2 ,

 . (2.35)
. (2.35)
Для определения направления углового ускорения e2 звена 2 надо мысленно перенести вектор ![]() тангенциального ускорения
тангенциального ускорения ![]() в точку В. В направлении этого вектора точка В вращается относительно точки А против часовой стрелки.
в точку В. В направлении этого вектора точка В вращается относительно точки А против часовой стрелки.
По аналогии определяем значения и направления угловых ускорений звеньев 4 и 5, с-2:
 ;
;  (по часовой стрелки);
(по часовой стрелки);
![]() ;
;  (по часовой стрелки). (2.36)
(по часовой стрелки). (2.36)
Похожие работы
... А. Черкудиновым (1959 г.), отразили состояние теории современного учения о механизмах. Одновременно И. И. Артоболевский начинает исследования в области теории механизмов машин автоматического действия: гидравлических, пневматических и гидропневматических. Для современных машин характерны вибрационные явления и существенное изменение массы в процессе работы. Чтобы учесть эти факторы, в большинстве ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... ,5 – 174,5 90 Δ, % 0,00 0,00 0,00 0,00 0,00 0,00 0,00 ПРИВЕДЁННЫЕ ФАКТОРЫ Положение 2 Расчёт ЭВМ Погрешность Δ, % – 156,6 – 156,6 0,00 IПР 0,22 0,22 0,00 2. Синтез и анализ кулачкового механизма 2.1 Построение диаграмм движения толкателя 1. Строится заданная диаграмма ускорений толкателя. Максимальная ордината ...
0 комментариев