Навигация
1. Выбор электродвигателя
1.1 Расчет требуемой мощности
Требуемая мощность электродвигателя, кВт
P1 = ![]() ,
,
где Рвых – выходная мощность на IV валу,
Рвых=5кВт;
η0 – общий КПД привода,
η0 = η1*η2 *η3*η4;
здесь ![]() – КПД одной пары подшипников качения,
– КПД одной пары подшипников качения, ![]() -КПД ременной передачи, η3 –КПД цилиндрической передачи, η4 –КПД цепной передачи примем
-КПД ременной передачи, η3 –КПД цилиндрической передачи, η4 –КПД цепной передачи примем ![]() = 0,99,
= 0,99, ![]() = 0.96,
= 0.96, ![]() 0,98, η4=0,97
0,98, η4=0,97
η0=0,99*0,96*0,98*0,97=0,85
Тогда P1= ![]() =5,9 кВт
=5,9 кВт
По требуемой мощности из табл. П. 1 [1] выбираем асинхронный электродвигатель 132S6 с ближайшей большей стандартной мощностью Pэ = 5,5 кВт, синхронной частотой вращения nс = 1000 мин-1 и скольжением S = 3,3%.
Частота вращения вала электродвигателя
n1= nс (1 – ![]() ) = 1000
) = 1000![]()
![]() мин
мин![]()
Общее передаточное число привода
uo=![]() =
=![]()
Передаточное число зубчатой передачи
u’= ![]() =
=![]() = 2,93
= 2,93
Округлим u’ до ближайшего стандартного значения (табл. 3 [1]). Принимаем u= 3,15
1.2 Частоты вращения валов
Частоты вращения валов (индекс соответствует номеру вала на схеме привода):
n1= 967 об/мин
n2= 483,5 об/мин
n3= 153,5 об/мин
n4= 51,2 об/мин
1.3 Мощность на валах
Мощности, передаваемые валами:
P1 = Р![]() = 5,9 кВт
= 5,9 кВт
P2 = Р![]()
![]() = 5,61 кВт
= 5,61 кВт
P3= Р![]()
![]() = 5,33 кВт
= 5,33 кВт
P4= Р![]()
![]() = 5,33 кВт
= 5,33 кВт
1.4 Крутящие моменты, передаваемые валами
Крутящие моменты, передаваемые валами, определяется по формуле
Ti = 9550![]() .
.
Тогда T1= 58,3 Нм
T2= 110,8 Нм
T3= 331,6 Нм
T4= 955 Нм
Полученные данные заносим в таблицу П2;
Таблица 2
| № вала | Ni об/мин | Pi кВт | Ti Нм |
| 1 | 967 | 5.9 | 58 |
| 2 | 483.5 | 5.61 | 111 |
| 3 | 153.5 | 5.33 | 332 |
| 4 | 51.2 | 5.12 | 955 |
Похожие работы
... в каждом конкретном случае исходя из габаритов проектируемого технического оборудования, места расположения насосной станции и рабочих органов машины, способов монтажа гидрооборудования и других условий. Для технологического оборудования малых и средних типоразмеров можно принять длины участков в следующих пределах: всасывающий трубопровод- до 1 метра, напорный и сливной до 5 метров. Для ...
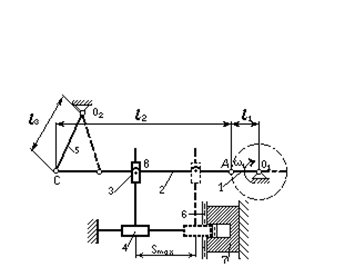
... характеристик решим графо-аналитическим методом, который основан на построении ряда последовательных положений звеньев механизма и соответствующих им планов скоростей. Механизм привода пресс-автомата с плавающим ползуном в масштабе μL=0,006 м/мм изобразим в двенадцати положениях. Положение механизма задаётся положением кривошипа 1. Каждое последующее положение кривошипа 1 отличается от ...
тора D = 275 мм Основная часть 1. Выбор электродвигателя, кинематический расчет привода 1.1 Необходимая мощность электродвигателя КПД редуктора: h = hпк2 hзц hк = 0,9952*0,98*0,95 = 0,92 Где hпк = 0,995 - КПД пары подшипников качения [2, с. 304] hзп = 0,98 - КПД зубчатой цилиндрической закрытой передачи hк = 0,95 - КПД клиноременной передачи [2, с. 304] Необходимая ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев