Навигация
Допускаемые напряжения изгиба
18376
знаков
2
таблицы
2
изображения
2.3 Допускаемые напряжения изгиба
![]() FPj=
FPj= ,
,
где sF lim j - предел выносливости зубьев при изгибе (табл. 7 [1]), sF limi=1.75*HBi
sF lim 1 = 499,6 МПа sF lim 2 = 434,9 Мпа
SFj - коэффициент безопасности при изгибе (табл. 7 [1]), SF1= 1,7, SF2= 1,7;
KFCj - коэффициент, учитывающий влияние двухстороннего приложения нагрузки, (табл. 7 [1]) KFC1= 0,65, KFC2= 0,65
KFLj - коэффициент долговечности при изгибе:
KFLj=
![]() 1.
1.
здесь qj – показатели степени кривой усталости: q1 = 6, q2 = 6 (табл. 6 [1]);
NF0 – базовое число циклов при изгибе; NF0 = 4•106.
NFEj – эквивалентное число циклов напряжений при изгибе; NFEj= ![]() Fj NΣj.
Fj NΣj.
Коэффициент эквивалентности при действии напряжений изгиба определяется по табл. 6 [1] в зависимости от режима нагружения и способа термообработки:
![]() F1 =0.038,
F1 =0.038, ![]() F2 =0.038,
F2 =0.038,
NFE1 =![]() =6,5
=6,5![]() , NFE2 =
, NFE2 =![]() =2,1
=2,1![]()
KFL1 =![]() , KFL2 =
, KFL2 =![]()
Допускаемые напряжения изгиба:
![]() FP1=
FP1= ![]() 191,03 МПа
191,03 МПа
![]() FP2=
FP2= ![]() 282,67 МПа
282,67 МПа
2.4 Геометрические параметры передачи
Межосевое расстояние определяем из условия контактной прочности:
![]() =
=![]() (u + 1)
(u + 1) ,
,
где ![]() – коэффициент вида передачи,
– коэффициент вида передачи, ![]() = 410
= 410
KН – коэффициент контактной нагрузки, предварительно примем KН =1.2.
Коэффициент ширины зубчатого венца ![]() = 0,4 (ряд на с. 4 [1]).
= 0,4 (ряд на с. 4 [1]).
Расчетное межосевое расстояние ![]() = 121,84 мм
= 121,84 мм
Округлим ![]() до ближайшего большего стандартного значения (табл. 2 [1])
до ближайшего большего стандартного значения (табл. 2 [1])
![]() = 125 мм.
= 125 мм.
Модуль выберем из диапазона (для непрямозубых передач стандартизован нормальный модуль mn)
mn = ![]() =(0,01…0,02) 125=(1,25…2,5)
=(0,01…0,02) 125=(1,25…2,5)
Округлим mnдо стандартного значения (табл. 1 [1]): mn = 2
Суммарное число зубьев:
Z![]() =
=![]() ,
,
где ![]() =
=![]() для прямозубых передач,
для прямозубых передач, ![]() =
=![]() для косозубых передач и
для косозубых передач и ![]() =
=![]() для шевронных передач.
для шевронных передач.
Z![]() =
= ![]() 122,27
122,27
Значение Z![]() округлим до ближайшего целого числа Z
округлим до ближайшего целого числа Z![]() =123
=123
Уточним для косозубых и шевронных передач делительный угол наклона зуба:
![]() = arccos
= arccos  =
=![]()
![]()
Число зубьев шестерни:
Z1=![]() =
=![]() =29,6
=29,6
Округлим до ближайшего значения Z1=30
Число зубьев колеса:
Z2= Z![]() – Z1=123–30=93
– Z1=123–30=93
Фактическое передаточное число:
uф = ![]() =
=![]() =3,1
=3,1
Значение uф не должно отличаться от номинального более чем на 2.5% при u
Похожие работы
... в каждом конкретном случае исходя из габаритов проектируемого технического оборудования, места расположения насосной станции и рабочих органов машины, способов монтажа гидрооборудования и других условий. Для технологического оборудования малых и средних типоразмеров можно принять длины участков в следующих пределах: всасывающий трубопровод- до 1 метра, напорный и сливной до 5 метров. Для ...
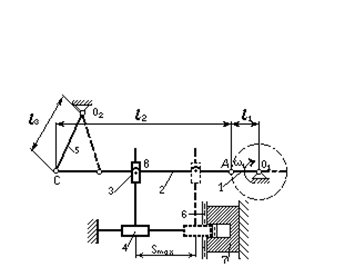
... характеристик решим графо-аналитическим методом, который основан на построении ряда последовательных положений звеньев механизма и соответствующих им планов скоростей. Механизм привода пресс-автомата с плавающим ползуном в масштабе μL=0,006 м/мм изобразим в двенадцати положениях. Положение механизма задаётся положением кривошипа 1. Каждое последующее положение кривошипа 1 отличается от ...
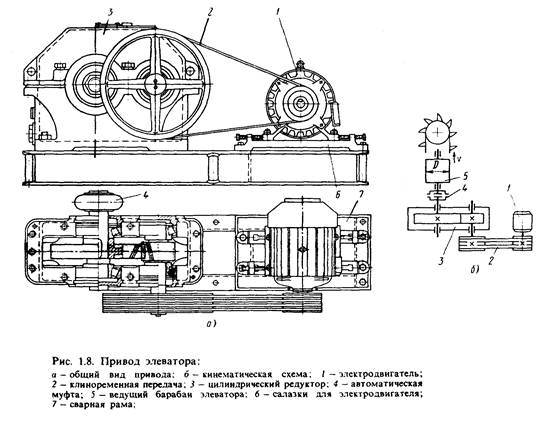
тора D = 275 мм Основная часть 1. Выбор электродвигателя, кинематический расчет привода 1.1 Необходимая мощность электродвигателя КПД редуктора: h = hпк2 hзц hк = 0,9952*0,98*0,95 = 0,92 Где hпк = 0,995 - КПД пары подшипников качения [2, с. 304] hзп = 0,98 - КПД зубчатой цилиндрической закрытой передачи hк = 0,95 - КПД клиноременной передачи [2, с. 304] Необходимая ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев