Навигация
И более чем на 4% при u > 4.5
18376
знаков
2
таблицы
2
изображения
![]() u = 100
u = 100  =100
=100![]()
Поскольку Z1>17 примем коэффициенты смещения: x1= 0, x2= 0
Ширинa венца колеса:
bw2=![]()
![]() =0,4
=0,4![]() 50
50
Округлим bw2 до ближайшего числа из ряда на с. 10 [1].
Ширину венца шестерни bw1 примем на 3 мм больше чем bw2:
bw1= 50+3=53
Определим диаметры окружностей зубчатых колес, принимая далее для непрямозубых колес m = mn.
Диаметры делительных окружностей прямозубых колес dj= mZj,
то же, для косозубых колес  :
:
d1 =![]() =61 мм; d2 =
=61 мм; d2 =![]() =188 мм.
=188 мм.
Диаметры окружностей вершин при x![]() = 0: daj= dj+ 2m (1 + xj):
= 0: daj= dj+ 2m (1 + xj):
da1 =![]() 65 мм; da2=
65 мм; da2=![]() 192 мм
192 мм
Диаметры окружностей впадин dfj= dj – 2m (1.25 – xj):
df1 =![]() 56 мм; df2 =
56 мм; df2 =![]() 183 мм
183 мм
Вычислим окружную скорость в зацеплении
V =![]() =
=![]() 1,54 м/с
1,54 м/с
Степень точности передачи выбираем по табл. 8 [1] в зависимости от окружной скорости в зацеплении: nст=8
2.5 Проверочные расчеты передачи
2.5.1 Проверка прочности на выносливость по контактным напряжениям
Условие контактной прочности передачи имеет вид ![]()
![]()
![]() .
.
Контактные напряжения равны
![]() =
=![]()
 ,
,
где Z![]() - коэффициент вида передачи, Z
- коэффициент вида передачи, Z![]() = 8400
= 8400
KН – коэффициент контактной нагрузки,
KН = KHα KHβ KНV.
Коэффициент неравномерности распределения нагрузки между зубьями
KHα =1+ A (nст – 5) Kw=1+0,15 (8–5)*0,228=1,103
где А = 0.06 для прямозубых и А = 0.15 для косозубых и шевронных передач;
Kw – коэффициент, учитывающий приработку зубьев.
Kw= 0.002НВ2 + 0.036 (V – 9)=![]() 0,228
0,228
Коэффициент неравномерности распределения нагрузки по ширине колеса
KHβ =1+ (K![]() – 1) Kw,
– 1) Kw,
где K![]() – коэффициент распределения нагрузки в начальный период работы, определяемый по табл. 9 [1] в зависимости от коэффициента ширины венца по диаметру.
– коэффициент распределения нагрузки в начальный период работы, определяемый по табл. 9 [1] в зависимости от коэффициента ширины венца по диаметру.
![]() = 0.5
= 0.5![]() (u + 1)=
(u + 1)=![]() 0,83
0,83
K![]() = 1,07 KHβ =1+(1,07–1)*0,228=1,02
= 1,07 KHβ =1+(1,07–1)*0,228=1,02
Динамический коэффициент определим потабл. 10 [1]
KНV= 1,06
Окончательно получим
KH=![]() 1,193
1,193
Расчетные контактные напряжения
![]() =
=![]() 515,657МПа
515,657МПа
Допускается перегрузка по контактным напряжениям не более 5%, рекомендуемая недогрузка до 15%. Расчет перегрузки или недогрузки выполним по формуле
![]()
![]() =100
=100 =
=![]() =3,9%
=3,9%
Похожие работы
... в каждом конкретном случае исходя из габаритов проектируемого технического оборудования, места расположения насосной станции и рабочих органов машины, способов монтажа гидрооборудования и других условий. Для технологического оборудования малых и средних типоразмеров можно принять длины участков в следующих пределах: всасывающий трубопровод- до 1 метра, напорный и сливной до 5 метров. Для ...
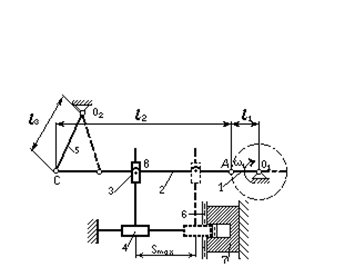
... характеристик решим графо-аналитическим методом, который основан на построении ряда последовательных положений звеньев механизма и соответствующих им планов скоростей. Механизм привода пресс-автомата с плавающим ползуном в масштабе μL=0,006 м/мм изобразим в двенадцати положениях. Положение механизма задаётся положением кривошипа 1. Каждое последующее положение кривошипа 1 отличается от ...
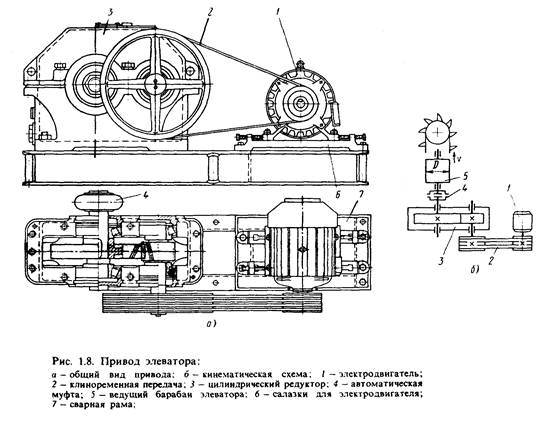
тора D = 275 мм Основная часть 1. Выбор электродвигателя, кинематический расчет привода 1.1 Необходимая мощность электродвигателя КПД редуктора: h = hпк2 hзц hк = 0,9952*0,98*0,95 = 0,92 Где hпк = 0,995 - КПД пары подшипников качения [2, с. 304] hзп = 0,98 - КПД зубчатой цилиндрической закрытой передачи hк = 0,95 - КПД клиноременной передачи [2, с. 304] Необходимая ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев