Навигация
Составляем векторное уравнение для определения скорости в точке В
17902
знака
7
таблиц
0
изображений
2.2 Составляем векторное уравнение для определения скорости в точке В.
![]() ;
;
![]() ,
,
где ![]() – абсолютная скорость точки А.
– абсолютная скорость точки А.
![]() м/сек;
м/сек;
![]() – относительная скорость точки В, направленная перпендикулярно шатуну АВ.
– относительная скорость точки В, направленная перпендикулярно шатуну АВ.
![]() – относительная скорость точки В, направленная вдоль ползуна.
– относительная скорость точки В, направленная вдоль ползуна.
Определяем масштаб плана скоростей:
![]() ;
;
![]() – произвольно взятый отрезок 150 мм.
– произвольно взятый отрезок 150 мм.
Строим план скоростей и с его помощью определенной скорости точек механизма и угловую скорость звена.
![]() м/с
м/с
![]() м/с
м/с
![]() м/с
м/с
![]() c-1.
c-1.
2.3 Для определения ускорений составляем систему векторов ускорений:
![]()
![]() ,
,
где ![]() – ускорение точки А.
– ускорение точки А.
Ввиду того, что ∆wmax мала, принимаем, что кривошип вращается с постоянной угловой скоростью w1= const.
Угловое ускорение кривошипа ![]() , тогда
, тогда ![]() .
.
![]() м/с-2;
м/с-2;
![]() м/с-2;
м/с-2;
![]() – вектор ускорения точки Во принадлежит стойке
– вектор ускорения точки Во принадлежит стойке ![]()
![]() – вектор Кориолисова ускорения;
– вектор Кориолисова ускорения;
![]() – вектор относительного ускорения, известен только по направлению.
– вектор относительного ускорения, известен только по направлению.
Определяем масштаб плана ускорений по формуле:
![]()
где ![]() − выбираем произвольно.
− выбираем произвольно.
Построение плана ускорений помогает определить абсолютные и относительные ускорения точек и угловые ускорения звеньев механизма для выбранных положений.
![]() м/с -2;
м/с -2;
![]() м/с-2;
м/с-2;
![]() м/с-2;
м/с-2;
![]() с-2
с-2
2.4 Определяем величины главных векторов сил инерции Ри и его главных моментов Ми:
![]() H;
H;
![]() H;
H;
![]()
![]() .
.
Момент сил инерции Mu2 заменим парой сил
![]() Н
Н
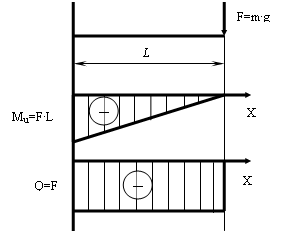
2.5 Определяем реакции в кинематических парах методом плана сил. Для этого вычерчиваем в масштабе l группу Ассура и прикладываем к ней силу Р; силы тяжести G2 и G3 и силы инерции Ри2 и Ри3; моменты сил инерции Mu2, реакцию R03; реакцию кривошипа на шатун R12, которую раскладываем на нормальную и тангенциальную.
![]()
Реакцию ![]() определим из уравнения равновесия моментов сил действующих на звено 2 (шатун АВ) относительно точки В.
определим из уравнения равновесия моментов сил действующих на звено 2 (шатун АВ) относительно точки В.
В уравнении берем слагаемые со знаком «+», если момент создаваемый силой направлен против часовой стрелки, и со знаком «–», если по часовой стрелки.
![]()
![]()
![]()
Записываем векторное уравнение всех сил:
![]()
Значения сил
Таблица 5.
| Положения механизма |
|
|
|
|
|
|
|
|
|
| 3 | 16500 | 295 | 54 | 619 | 17246 | 54 | 514 | 3200 | 16700 |
Неизвестные реакции ![]() и
и ![]() определим графическим построением плана сил в масштабе:
определим графическим построением плана сил в масштабе:
![]() ;
;
Похожие работы


... 9 -41 72,6 0,354 -2,5 2,01 -1,77 117,7 83,70 10 -71 81,3 0,301 -6,4 1,02 -4,6 97,2 75,17 11 -101 95,2 0,294 -7,8 -0,61 -5,1 -62,8 57,68 12 -131 105,8 0,337 -3,5 -1,84 -2,53 -124,76 89,04 2. Силовой расчёт. 2.1. Исходные данные: Усилие резани Рпс=130 кг. Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг. Угловая скорость ...
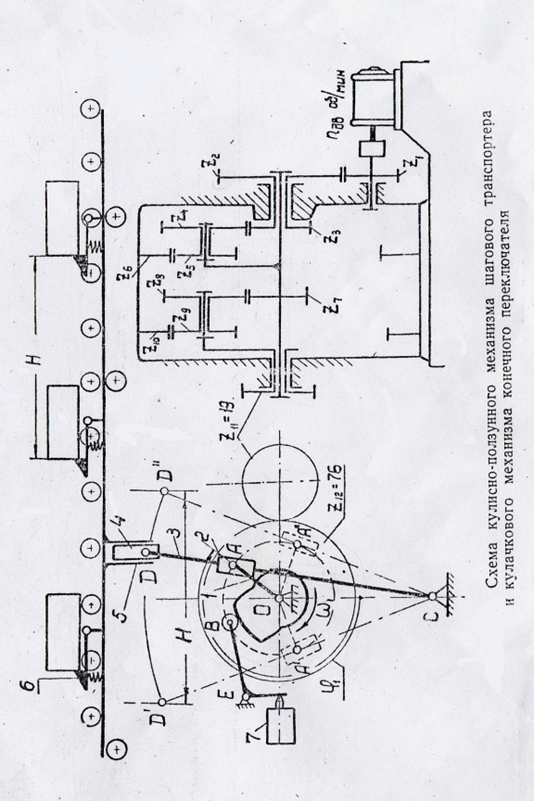
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... механизма, а так же технологическими и экономическими особенностями изготовления механизма, а так же условиями, в которых будет работать будущий механизм. Поэтому вопрос практического проектирования зубчатых передач является достаточно актуальным в современной радиоэлектронной промышленности. 2. Анализ технического задания Техническое задание представляет из себя задание на расчёт параметров ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев