Навигация
Рассчитываем диаметр зубчатых колес
17902
знака
7
таблиц
0
изображений
3.2 Рассчитываем диаметр зубчатых колес.
Определяем делительный диаметр шестерни и колеса:
![]() мм
мм
![]() мм
мм
Определяем начальный диаметр шестерни и колеса:
![]() мм
мм
![]() мм
мм
Определяем коэффициент воспринимаемого смешения:
![]() мм
мм
Определим делительное межосевое расстояние:
![]() мм
мм
Определяем коэффициент уравнительного смещения:
![]() мм
мм
Определяем диаметр вершины зубьев шестерни и колеса:
![]() мм;
мм;
![]() мм
мм
Определяем диаметр впадины шестерни и колеса:
![]() мм
мм
![]() мм
мм
Проверка вычислений межосевого расстояния:
![]() мм;
мм;
![]() мм.
мм.
3.3 Рассчитываем размеры для контроля взаимного положения разноименных профилей зубьев.
Определяем нормальную толщину шестерни и колеса:
![]() мм;
мм;
![]() мм.
мм.
3.4 Рассчитываем размеры для контроля номинальной поверхности зуба.
Определяем основной диаметр шестерни и колеса:
![]() мм
мм
![]() мм
мм
Определяем угол профиля зуба в точке на окружности вершин шестерни и колеса:
![]() ;
;
![]() 40°30'
40°30'
![]()
![]() 30°30'
30°30'
Определяем радиус кривизны активного профиля зуба в нижней точке шестерни и колеса:
![]() мм;
мм;
![]() мм.
мм.
3.5 Рассчитываем размеры для контроля взаимного положения одноименных профилей зубьев.
Определяем шаг зацепления:
![]() мм.
мм.
Определяем делительный шаг окружности:
![]() мм.
мм.
Определяем осевой шаг:
3.6 Проверим качество зацепления по геометрическим показателям.
Определим коэффициент наименьшего смещения шестерни и колеса:
![]() .
.
Проверим отсутствия интерференции зубьев.
Определим радиус кривизны в граничной точке профиля зуба шестерни и колес:
![]()
![]()
Определяем коэффициент торцевого перекрытия:

Определяем удельное скольжение профиля зуба в заданной точке шестерни и колеса:
− в нижней точке зуба:
![]()
![]()
− на вершине зуба:
![]()
![]()
Строим картину эвольвентного зацепления по методике [4] стр.18-20 в масштабе:
![]()
РАЗДЕЛ IV
Синтез кулачкового механизмаСинтез кулачкового механизма заключается в определении основных геометрических параметров кулачкового механизма и построении профиля кулачка, обеспечивающий заданный закон движения толкателей.
Основные геометрические параметры кулачкового механизма определяют по заданному закону движения и условию обеспечения допустимого угла давления для механизмов с поступательно-движущимся роликовым толкателем.
Для толкателя характерными являются 4 фазы движения:
1. Фаза подъема, определяемая углом поворота кулачка, и обозначается ![]()
2. Фаза верхнего выстоя ![]()
3. Фаза опускания ![]()
4. Фаза нижнего выстоя ![]()
По заданному закону движения толкателя
Строим аналог ускорений.
Для этого определим рабочий угол кулачка:
![]()

![]()
![]()
Масштаб времени:
![]()
![]()
Масштаб ускорений:

Масштаб скорости:

Определяем минимальный радиус кулачка по методу Геронимуса. Для этого строим диаграмму S=S(φ1).
При этом масштабе на обеих осях должны быть между собой равны ![]() .
.
В случае неравенства указанных масштабов определяется угол v, под которым проводится наклонная прямая MN. Угол v откладываем на горизонтальной оси в сторону, обратную вращению кулачка.
![]() =54°20'
=54°20'
К полученной кривой проводим касательные АВ и СД под углом 63°.
rmin = OС0![]() =
=![]() м
м
Построение профиля кулачка ведём по методике, описанной в [3] стр.15.
Область, ограниченная углом ВО1Д будет зоной расположения возможных центров вращения кулачка.
Определим радиус ролика :
r< 0,7min = 0,7x17=11,9мм
r< 0,4 Rmin = 0,4x34=13,6мм
За радиус ролика принимаем меньшее из меньшего значения r = 10 мм
Через точки 1 /,2 / и т.д. проводим касательные, которые пересекаясь с соответствующими окружностями дадут центровой профиль кулачка. Практический профиль вычерчивается, как огибающая окружностей, проведенных из центров, расположенных на центровом профиле, радиусом ролика.
ЛИТЕРАТУРА
1. Методические указания к выполнению курсового проекта по теории механизмов и машин,− Курган, КМИ, 1984г.
2. Силовой расчёт механизмов. Методические указания к выполнению курсового проекта по теории механизмов и машин, Курган, КМИ, 1992г.
3. Синтез кулачковых механизмов. Методические указания к выполнению курсового проекта по теории механизмов и машин, Курган, КМИ, 1985г.
4. Проектирование эвольвентного зацепления и планетарного механизма с применением ЭВМ. Методические указания к выполнению курсового проекта по теории механизмов и машин, Курган, КМИ, 1989г.
5.Кореняко А.С., Курсовое проектирование по теории механизмов и машин, М.−Л., изд. Машиностроение, 1964г. 324с.
Похожие работы


... 9 -41 72,6 0,354 -2,5 2,01 -1,77 117,7 83,70 10 -71 81,3 0,301 -6,4 1,02 -4,6 97,2 75,17 11 -101 95,2 0,294 -7,8 -0,61 -5,1 -62,8 57,68 12 -131 105,8 0,337 -3,5 -1,84 -2,53 -124,76 89,04 2. Силовой расчёт. 2.1. Исходные данные: Усилие резани Рпс=130 кг. Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг. Угловая скорость ...
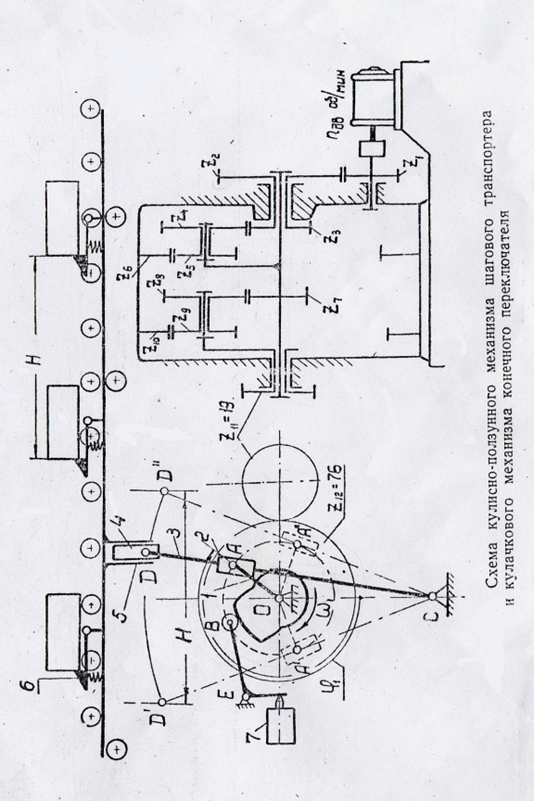
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... механизма, а так же технологическими и экономическими особенностями изготовления механизма, а так же условиями, в которых будет работать будущий механизм. Поэтому вопрос практического проектирования зубчатых передач является достаточно актуальным в современной радиоэлектронной промышленности. 2. Анализ технического задания Техническое задание представляет из себя задание на расчёт параметров ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев