Навигация
Определяем момент инерции маховика, обеспечивающий вращения звена приведения с заданным коэффициентом =0,022
17902
знака
7
таблиц
0
изображений
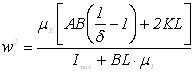
1.12 Определяем момент инерции маховика, обеспечивающий вращения звена приведения с заданным коэффициентом =0,022.
 ,
,
где АВ отрезок на оси ординат кривой, «Энергия-масса».
![]() кг м2
кг м2
1.13 Определим значение угловой скорости звена приведения во всех положениях кривошипа, для этого воспользуемся диаграммой «Энергия-масса».
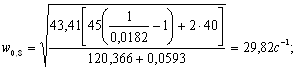
Расчет угловой скорости ведем по формуле:
 ,
,
где KL – ордината диаграммы «Энергия-масса» в требуемом положении;
BL – абсцисса диаграммы «Энергия-масса» в требуемом положении.
Вычислим угловую скорость для каждого положения:
Вычислим изменение угловой скорости для каждого положения:
![]()
![]()
Результаты вычислений угловой скорости заносим в таблицу 4.
Исходные данные и результаты вычислений к ,с-1
Таблица 4.
| Положения маховика | KL | к ,с-1 | ∆к |
| 0 | 40 | 29,82 | 0,2 |
| 1 | 46 | 29,88 | 0,26 |
| 2 | 42 | 29,58 | -0,03 |
| 3 | 18 | 29,54 | -0,077 |
| 4 | 1 | 29,354 | -0,266 |
| 5 | 12 | 29,47 | -0,149 |
| 6 | 24 | 29,60 | -0,02 |
| 7 | 32 | 29,71 | 0,09 |
| 8 | 40 | 29,82 | 0,2 |
По полученным значениям строим график изменения угловой скорости ∆wi= ∆wi(1), относительно прямой, совпадающей со значением угловой скорости звена приведения:
![]()
![]()

Вывод: входное звено вращается с переменной угловой скоростью и переменным ускорением, за счет действия переменных нагрузок. Т.к. ![]() >0, то маховик нужен, чтобы обеспечить заданную неравномерность хода =0,0182.
>0, то маховик нужен, чтобы обеспечить заданную неравномерность хода =0,0182.
РАЗДЕЛ II
Силовой анализ рычажного механизма
Силовой анализ механизма заключается в нахождении неизвестных сил и моментов, приложенных к каждому звену исследуемого механизма, в частности реакции в кинематических парах.
Чтобы выполнить силовой расчет необходимо определить внешние силы и моменты сил действующих на звенья механизма (движущая сила, силы полезного сопротивления, силы тяжести или сопротивление среды).
Возникновение реакции в кинематических парах обусловлено не только воздействием внешних сил, но и движением звеньев с ускорениями.
Расчет ведем по методу Д'Аламбера, который формулируется следующим образом:
Если к внешним силам, действующим на механические системы, прибавить силы инерции, то такую систему можно рассматривать условно находящуюся в равновесии.
Целью данного раздела является определение реакции в кинематических парах. Расчет ведется в порядке обратном кинематическому анализу, т.е. расчет начинаем с группы наиболее удаленной от ведущего звена.
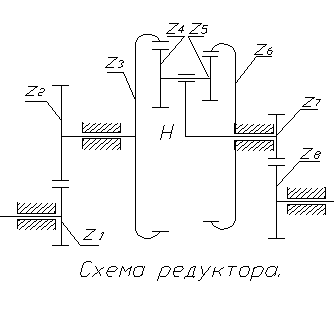
2.1 Вычерчиваем в масштабе ![]() кинематическую схему механизма соответствующую min и max значениям приведенного момента Мспр сил сопротивления:
кинематическую схему механизма соответствующую min и max значениям приведенного момента Мспр сил сопротивления:
 ,
,
где ОА – отрезок произвольно взятый на чертеже, мм.
Принимаем ![]()
![]()
![]()
Похожие работы


... 9 -41 72,6 0,354 -2,5 2,01 -1,77 117,7 83,70 10 -71 81,3 0,301 -6,4 1,02 -4,6 97,2 75,17 11 -101 95,2 0,294 -7,8 -0,61 -5,1 -62,8 57,68 12 -131 105,8 0,337 -3,5 -1,84 -2,53 -124,76 89,04 2. Силовой расчёт. 2.1. Исходные данные: Усилие резани Рпс=130 кг. Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг. Угловая скорость ...
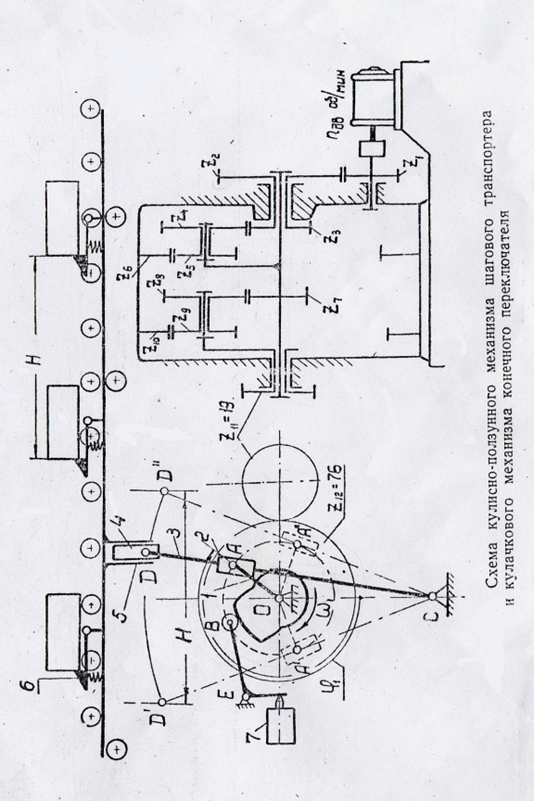
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... механизма, а так же технологическими и экономическими особенностями изготовления механизма, а так же условиями, в которых будет работать будущий механизм. Поэтому вопрос практического проектирования зубчатых передач является достаточно актуальным в современной радиоэлектронной промышленности. 2. Анализ технического задания Техническое задание представляет из себя задание на расчёт параметров ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев