Навигация
Производим силовой расчет входного звена
17902
знака
7
таблиц
0
изображений
2.6 Производим силовой расчет входного звена
К звену приложены сила реакции ![]() в точке А, сила тяжести G1 в точке 0, неизвестная по величине и направлению реакции R01 в точке 0 и неизвестна по величине уравновешивающая сила Рур в точке А.
в точке А, сила тяжести G1 в точке 0, неизвестная по величине и направлению реакции R01 в точке 0 и неизвестна по величине уравновешивающая сила Рур в точке А.
Силовой расчет ведущего звена сводится к определению уравновешивающей силы, которую определяем из уравнения моментов.
М0 = 0 (сумма моментов относительно точки 0 должна быть равна 0)
![]()
Рассчитаем Рур для3-ого положения:
![]()
Таблица 6. Значения сил
| Положение механизма |
|
|
|
|
| 3 | 14473 | 2698 | 16700 | 11000 |
![]()
Реакция R01 стойки на звено определим в результате графического решения векторного уравнения равновесия сил:
![]()
2.7 Методом рычага Жуковского определим уравновешивающую силу. Рычаг Жуковского представляет собой план скоростей, повернутый на 90° вокруг своей оси, в соответствующих точках, которого, приложены все внешние силы инерции, а так же моменты, действующие на звенья механизма.
![]()
Записываем векторное уравнение всех сил:
![]()
Рычаг Жуковского будет в равновесии, если к нему приложить уравновешивающую силу и моменты.

![]()
![]()
2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского.
![]()
Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции.
РАЗДЕЛ III
Проектирование эвольвентного зубчатого зацепления
Задачами проектирования является выбор исходных данных, расчет геометрических параметров, контрольных размеров, качественных показателей и кинематических параметров эвольвентного зубчатого зацепления. Исходные данные для расчета:
| Наименование параметра | Обозначение | Значение |
| Число зубьев шестерни |
| 14 |
| Число зубьев колеса |
| 27 |
| Модуль | m | 2,5 мм |
| Угол наклона | | 0° |
| Угол профиля | | 20° |
| Коэффициент высоты головки |
| 1 |
| Коэффициент граничной высоты |
| 2 |
| Коэффициент радиального зазора | с* | 0,25 |
| Коэффициент смещения у шестерни |
| 0,826 |
| Коэффициент смещения у колеса |
| 0,399 |
3.1 Рассчитываем передаточное число зубчатых колес:
![]()
Выбираем коэффициент смещения по таблице 4,5,6 стр. 67,68 [5] по передаточному отношению х1 и х2.
Определяем коэффициент суммы смещения:
![]()
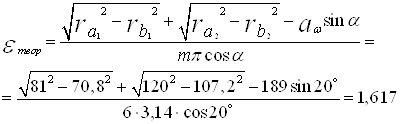
Определяем угол зацепления:

![]() 26°38'
26°38'
![]() мм
мм
Похожие работы


... 9 -41 72,6 0,354 -2,5 2,01 -1,77 117,7 83,70 10 -71 81,3 0,301 -6,4 1,02 -4,6 97,2 75,17 11 -101 95,2 0,294 -7,8 -0,61 -5,1 -62,8 57,68 12 -131 105,8 0,337 -3,5 -1,84 -2,53 -124,76 89,04 2. Силовой расчёт. 2.1. Исходные данные: Усилие резани Рпс=130 кг. Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг. Угловая скорость ...
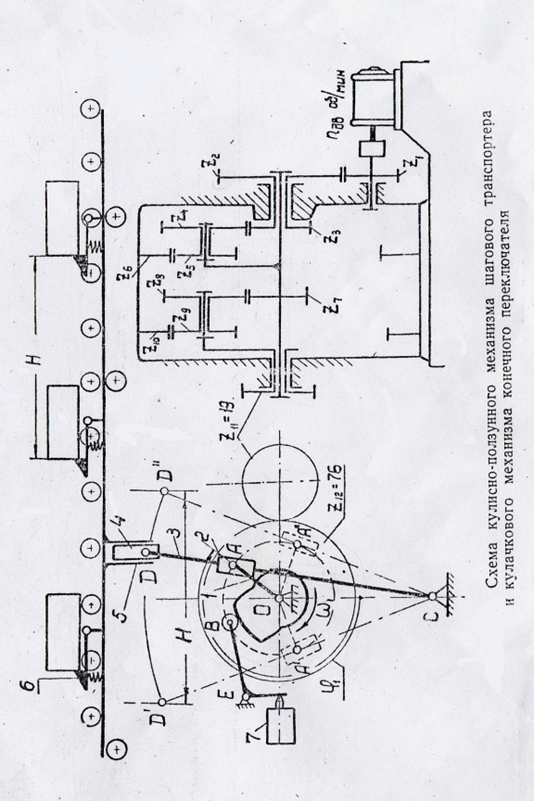
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... механизма, а так же технологическими и экономическими особенностями изготовления механизма, а так же условиями, в которых будет работать будущий механизм. Поэтому вопрос практического проектирования зубчатых передач является достаточно актуальным в современной радиоэлектронной промышленности. 2. Анализ технического задания Техническое задание представляет из себя задание на расчёт параметров ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев