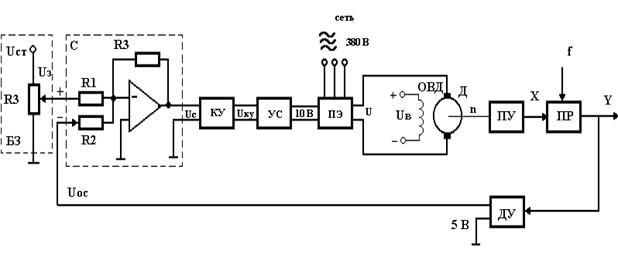
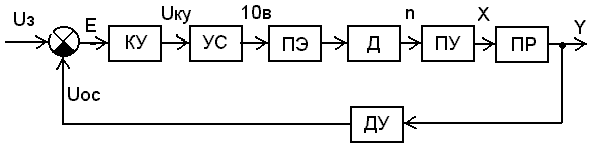
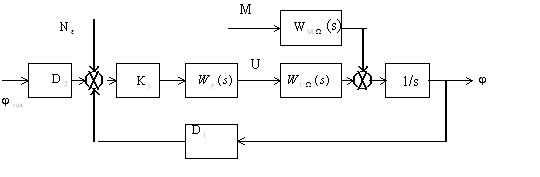
Синтез следящей системы с отрицательной обратной связью по току и по скорости
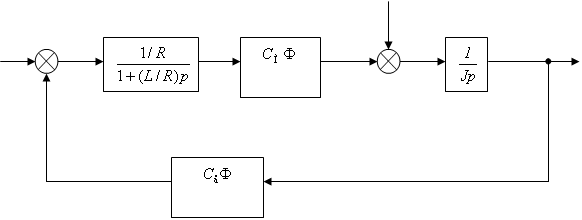
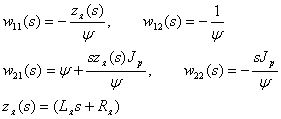
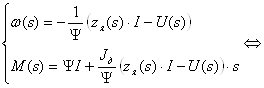
Уравнение второго сумматора
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез последовательного корректирующего устройства
Проверка устойчивости внутреннего контура системы
Расчет элементов следящей системы
Навигация
Расчет элементов следящей системы
Синтез следящей системы с обратной связью по току и по скорости
21262
знака
4
таблицы
8
изображений
8. Расчет элементов следящей системы
Коэффициент усиления разомкнутой системы:
![]() .
.
Коэффициент передачи обратной связи по току:
![]() .
.
Из справочных данных выбираем сельсин-датчик и сельсин-приемник.
Сельсины-датчики и сельсины-приемники выбирают таким образом, чтобы их параметры были близки друг к другу. В качестве сельсина-датчика, сельсина-приемника выбираем сельсины типа БД150, БС151 соответственно с параметрами:
![]() – номинальное напряжение сельсинов;
– номинальное напряжение сельсинов;
![]() – коэффициенты трансформации СД и СП.
– коэффициенты трансформации СД и СП.
Находим крутизну сигнала ошибки, определяемую крутизной измерителей угла рассогласования между сигналами входного и выходного поворотных трансформаторов.
![]() ;
;
![]()
Определяем суммарный коэффициент усиления сигнала в цепи ошибки:
![]()
В качестве электронного усилителя выбираем УПТ-3 с коэффициентом усиления: ![]() .
.
Коэффициент усиления фазочувствительного выпрямителя:
![]() .
.
Определяем коэффициент передачи ОС по скорости:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Коэффициент с определяем по построению ОЖЛАЧХ :
![]() ;
;
![]() ;
;
![]()
Определяем коэффициент передачи тахогенератора:
![]()
Переводим в мВ/об/мин:
![]()
По справочнику выбираем тахогенератор ТГ –1 с техническими данными:
nном=1100 об/мин;
КТГ=0.42 мВ/об/мин;
Сопротивление RC выбирается
![]() ;
;
![]() ;
;
![]() .
.
![]() .
.
![]() .
.
![]() .
.
9. Расчет переходного процесса
В процессе анализа системы автоматического управления определяются показатели качества, по которым и судят о свойствах и работоспособности системы. Удовлетворение необходимых показателей качества САУ является достаточным условием работоспособности системы.
Показатели качества управления при единичном ступенчатом воздействии на входе системы определяются путем анализа кривой переходного процесса. К основным показателям качества относятся быстродействие (длительность переходного процесса), перерегулирование и др.
Переходной процесс представляет собой такое состояние системы, при котором происходят непрерывные, последовательные изменения параметров режима, обусловленные изменением начальных условий или появлением возмущающих воздействий и приводящее к отклонению режима от его установившегося значения.
Переходный процесс характеризуется качеством управления, которое во многом определяет качество САУ в целом, поэтому наряду с анализом системы на устойчивость, неотъемлемой частью проектирования любой САУ является построение переходного процесса.
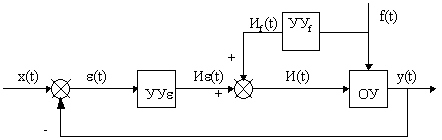
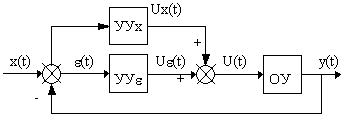
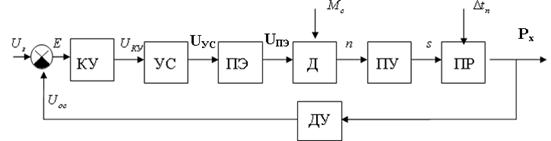
При построении переходного процесса используем следующую схему замкнутой системы автоматического управления (см. рис.8):

Рис.8.
В данном курсовом проекте переходной процесс системы автоматического управления построен с помощью программы MATLAB (см. рис.9).
» w1=tf(912, [0 1 0]); - выводит на экран передаточную функцию ![]() .
.
» w2=tf([0 0.2188 1],[0 1.41 1]); - выводит на экран передаточную функцию ![]() .
.
» w4=tf([0 0.2188 1],[0 1.41 1]); - выводит на экран передаточную функцию ![]() .
.
» w5=tf(1,[0 0.02 1]); - выводит на экран передаточную функцию ![]() .
.
» w6=tf(1,[0 0.011 1]); - выводит на экран передаточную функцию ![]() .
.
» w7=tf(1,[0 0.011 1]); - выводит на экран передаточную функцию ![]() .
.
>>w3=tf(1,[0 0.011 1]); - выводит на экран передаточную функцию ![]() .
.
» w=w1*w2*w3*w4*w5*w6*w7; - выводит на экран передаточную функцию разомкнутой скорректированной системы.
 .
.
» Wzs=feedback(w,1); - выводит на экран передаточную функцию замкнутой скорректированной системы

![]() .
.
» T=[0:0.001:1]; - задаем время Т.
» step(Wzs,T) – строим переходной процесс.
» grid on – включаем сетку.
» dt=[0:0.05:1];
» [dx t]=step(Wzs,dt);
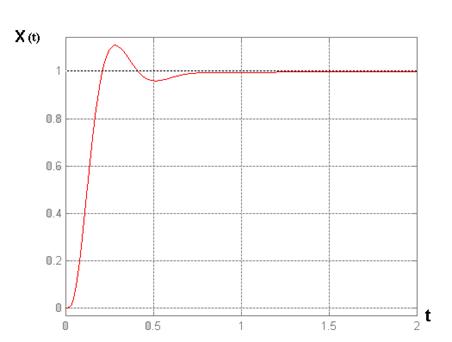
Рис.9.
Определим показатели качества системы и сравним их с заданными.
Быстродействие определяется длительностью переходного процесса. Переходный процесс длится бесконечно долго. На практике считают, что переходной процесс закончился, если в дальнейшем отклонение выходной величины ХВЫХ от установившегося значения ХВЫХ уст не превышает 3¸5%. ![]() . Перерегулирование:
. Перерегулирование:
![]() .
.
Заключение
В ходе курсового проектирования был выполнен синтез следящей системы с неизменяемой частью ЭМУ-Д и обратной связью по току и скорости.
В курсовом проекте представлено математическое описание проектируемой системы, произведен синтез и рассчитаны параметры последовательного и параллельного корректирующих устройств, выбраны и рассчитаны элементы, обеспечивающие обратные связи.
В проекте представлен расчет запаса устойчивости, как внутреннего контура, так и всей системы в целом. Результаты расчета показывают, что спроектированная система является устойчивой.
Также в проекте произведен расчет переходного процесса. Результаты расчета позволяют сделать вывод о качестве управления. Из спроектированной системы видно, что она обладает достаточными запасами устойчивости как по фазе так и по амплитуде.
Перерегулирование синтезированной системы меньше заданного ![]() .
.
Список литературы
1. А.Н. Ткаченко. Судовые системы автоматического управления и регулирования. Учебное пособие. – Л.: Судостроение, 1984. – 288 с., ил.
2. А.В. Нетушила. Теория автоматического управления. Учебник для вузов. Изд. 2-е, доп. и перераб. М., «Высшая школа», 1976.
3. А.Н. Ткаченко, А.П. Гуров, Н.Т. Шаповалов. Методические указания по курсовому проектированию по курсу судовые системы автоматического управления. – Н., 1981.
4. А.А. Воронов. Основы теории автоматического регулирования и управления. – М., Высшая школа, 1977.
5. В.Ф. Михайлов. Судовая электроавтоматика. – Л., Судостроение, 1970.
Похожие работы

... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
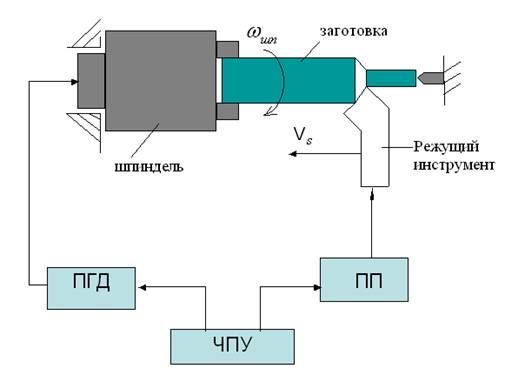


... этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания. 7. Выбор метода и алгоритма адаптивного управления ...
0 комментариев