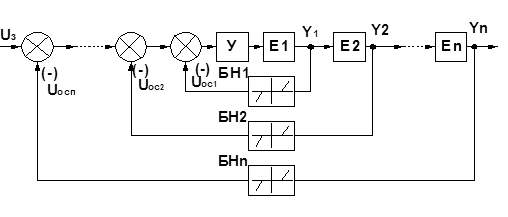
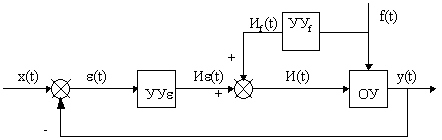
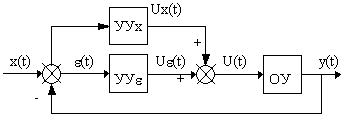
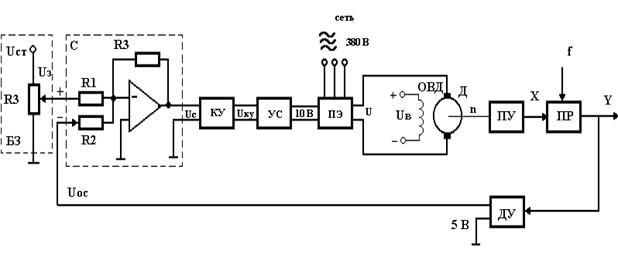
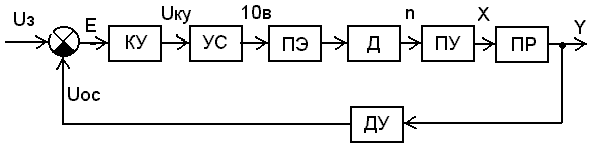
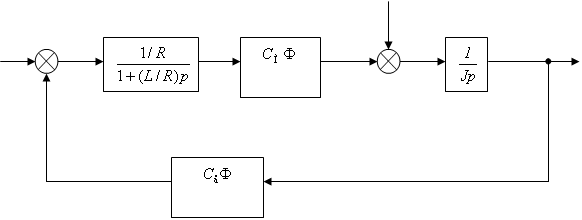
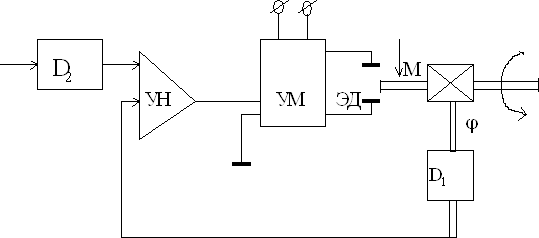
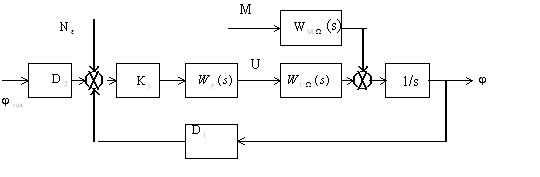
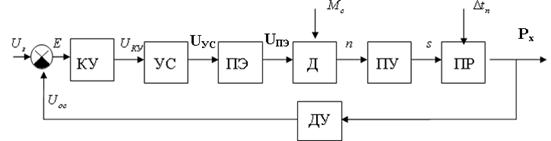
Синтез следящей системы с отрицательной обратной связью по току и по скорости
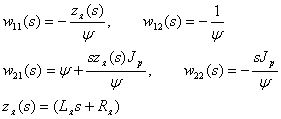
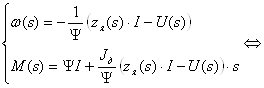
Уравнение второго сумматора
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез последовательного корректирующего устройства
Проверка устойчивости внутреннего контура системы
Расчет элементов следящей системы
Навигация
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез следящей системы с обратной связью по току и по скорости
21262
знака
4
таблицы
8
изображений
3. Построение обратной логарифмической частотной характеристики неизменяемой части системы
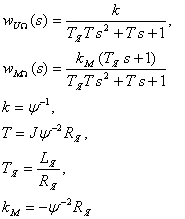
Обратная передаточная функция неизменной части системы при коэффициенте разомкнутой системы к=1 и П(р)=1 имеет вид:
![]() .
.
Определим действующее значение сопротивления силовой цепи ЭМУ-Д, которое равно сумме действующего сопротивления ЭМУ и сопротивления якоря двигателя:
![]() , где
, где
![]() ;
;
![]() .
.
Находим коэффициент противо-ЭДС двигателя:
 .
.
Находим постоянную времени разгона двигателя:
![]() ,
,
J – суммарный момент инерции якоря двигателя и объекта, приведенный к валу двигателя.
![]() .
.
![]() .
.
Тогда
![]() .
.
![]() .
.
Сопрягающие частоты:
![]() ;
;
![]() .
.
Масштаб:
1 дек = 50 мм;
20 дБ = 25 мм.
Построение ОЛАЧХ неизменяемой части системы показано на рис5
4. Построение желаемой обратной логарифмической частотной характеристики
В основу построения ОЖЛАЧХ следящих систем должны быть положены следующие основные показатели качества: точность слежения, быстродействие, запасы устойчивости по фазе и амплитуде, фильтрующие свойства. Достижению каждого из них соответствует реализация определенных участков ОЖЛАЧХ.
Закон изменения задающего воздействия:
![]() , где
, где
![]() - постоянная составляющая скорости изменения задающего воздействия.
- постоянная составляющая скорости изменения задающего воздействия.
![]() - амплитудное значение гармонической составляющей задающего воздействия.
- амплитудное значение гармонической составляющей задающего воздействия.
![]() - рабочая частота гармонической составляющей.
- рабочая частота гармонической составляющей.
Продифференцировав три раза закон изменения задающего воздействия, получим:
Отсюда определяем:
Амплитуда гармонического сигнала:
 ;
;
Рабочая частота:
 ;
;
Постоянная составляющая скорости изменения задающего воздействия:
![]() .
.
Для того, чтобы задающее воздействие воспроизводилось с требуемой точностью, ОЖЛАЧХ должна проходить не выше контрольной рабочей точки с координатами:
 .
.
Гармоническая составляющая ошибки:
![]() ;
;
 .
.
Тип ОЖЛАЧХ выбираем в соответствии со следующими правилами: так как величина отношения ошибки ![]() к амплитуде управляющего воздействия
к амплитуде управляющего воздействия ![]() удовлетворяет неравенству
удовлетворяет неравенству
![]() .
.
Выбираем 3 тип ОЖЛАЧХ.
Частота привязки определяется из выражения:
 .
.
Передаточная функция скорректированной системы для ОЛАЧХ 3 типа:
![]() .
.
Построение ОЖЛАЧХ показано на рис.5а (на доп. чертеже). По построению видно, что ОЖЛАЧХ проходит через контрольную точку. Сопрягающие частоты ОЖЛАЧХ и соответствующие им постоянные времени:
![]() ;
; ![]()
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
5. Синтез корректирующих устройств
Применение корректирующих устройств преследует две цели:
1. обеспечить требуемую точность системы;
2. получить приемлемый характер переходных процессов, т.е. качество регулирования.
Применение этих устройств направлено на введение в алгоритм управления производных и интегралов от ошибки и от внешних воздействий. При этом дифференцирование и интегрирование может осуществиться либо во всем частотном диапазоне работы системы, либо на некотором его интервале. Последовательные корректирующие устройства размещают в цепи основного воздействия, а параллельные – в цепях обратных связей.
Наиболее универсальным и эффективным методом повышения точности является увеличение общего коэффициента усиления. Это можно сделать за счет введения в систему дополнительных усилителей.
Однако при увеличении общего коэффициента усиления система приближается к границе устойчивости. При некотором предельном значении коэффициента усиления система может стать неустойчивой. Таким образом, корректирующие устройства должны не только увеличить коэффициент усиления системы, но и одновременно повысить запас ее устойчивости.
Похожие работы

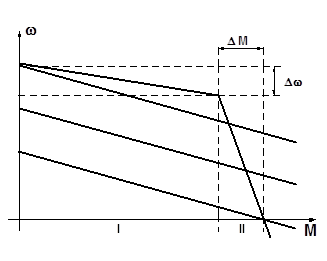
... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
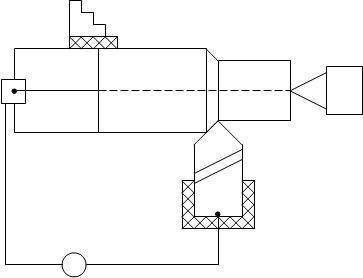
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
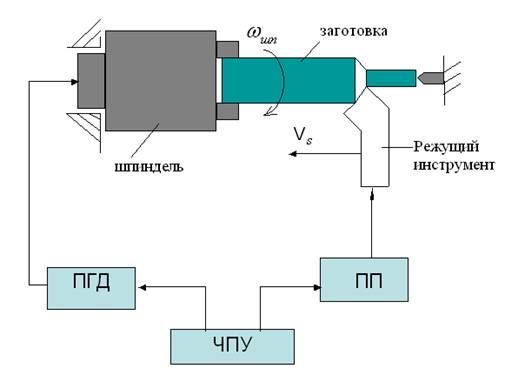
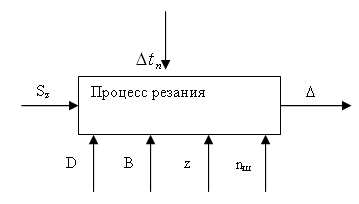


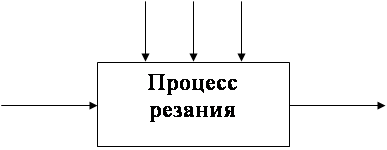
... этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания. 7. Выбор метода и алгоритма адаптивного управления ...
0 комментариев