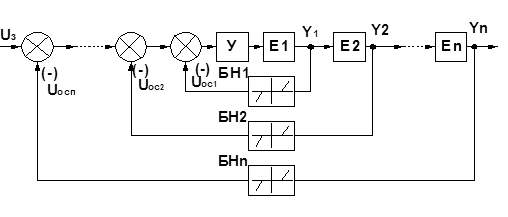
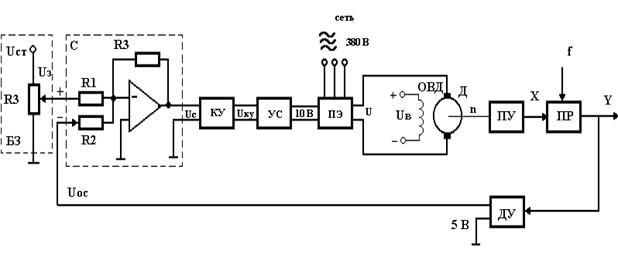
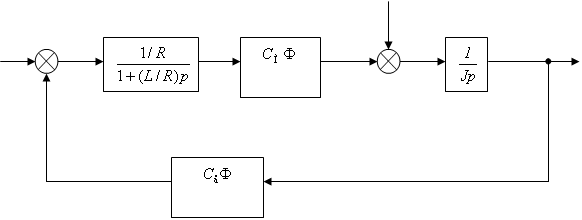
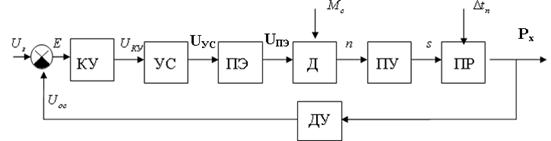
Синтез следящей системы с отрицательной обратной связью по току и по скорости
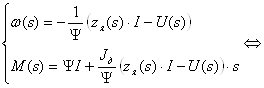
Уравнение второго сумматора
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез последовательного корректирующего устройства
Проверка устойчивости внутреннего контура системы
Расчет элементов следящей системы
Навигация
Уравнение второго сумматора
Синтез следящей системы с обратной связью по току и по скорости
21262
знака
4
таблицы
8
изображений
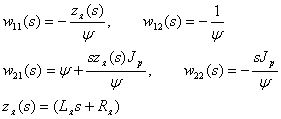
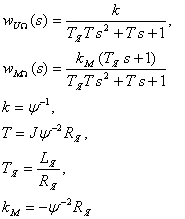
7. Уравнение второго сумматора.
 ; (7)
; (7)
Подставим уравнение (7) в формулу (4):
![]() ; (8)
; (8)

Разделим левую и правую части уравнения на передаточное число редуктора i. При этом в левой части уравнения оставим только слагаемые, содержащие ошибку ![]() .
.
 .
.
Введем обозначения:
Коэффициент разомкнутой системы:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Коэффициент обратной связи по скорости:
![]() .
.
Перепишем уравнение с учетом введенных обозначений:
![]()
Разделим левую и правую части уравнения на слагаемое ![]() .
.
 .
.
Так как
![]() ,
,
то
![]() - коэффициент усиления системы по моменту;
- коэффициент усиления системы по моменту;
![]() .
.
 . (9)
. (9)
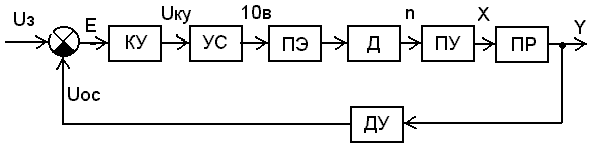
Уравнение (9) представляет собой уравнение разомкнутой скорректированной системы, разрешенной относительно сигнала ошибки. На основе принципа суперпозиции для линейных САУ обратная передаточная функция разомкнутой системы может быть получена из уравнения (11) при МВ=0.
![]() . (10)
. (10)
В случае отсутствия последовательного корректирующего устройства (при П(р)=1) обратная передаточная функция для системы с обратной связью по току определится следующим образом:
![]() . (11)
. (11)
2. Постановка задачи синтеза
В том случае, если в качестве исходных данных заданы принципиальная схема системы и параметры ее основных элементов, а также требования к динамическим свойствам, постановка задачи может быть сформулирована следующим образом: с целью улучшения показателей качества управления в определенные места системы включаются устройства, называемые корректирующими.
Корректирующие устройства бывают последовательные и параллельные.
В качестве основного метода синтеза в курсовом проекте применяется метод обратных логарифмических частотных характеристик.
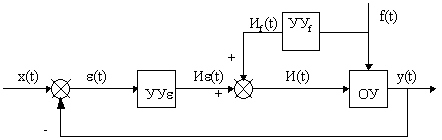
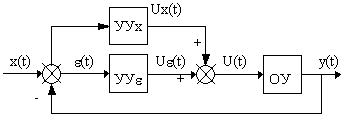
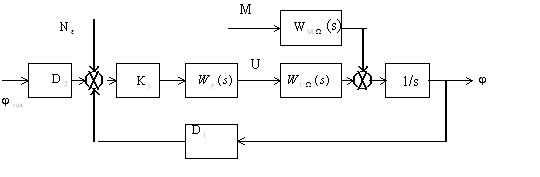
Сущность этого метода сводится к следующему. Пусть задана структурная схема следящей системы в самом общем виде, содержащая последовательное П(р) и параллельное К(р) корректирующие устройства и охваченную часть системы W0(p) (см. рис.3).
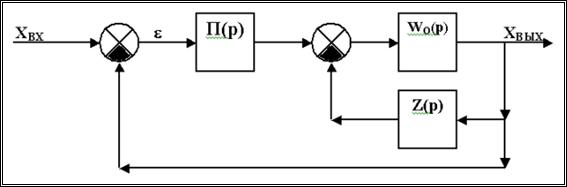
Рис.3.
В процессе синтеза надо стараться ввести такие корректирующие устройства, которые изменят исходную ЛАЧХ системы таким образом, чтобы ЛАЧХ скорректированной системы совпадала с желаемой ЛАЧХ. Тогда передаточная функция разомкнутой скорректированной системы:
![]() ,
,
а соответствующая ей обратная передаточная функция:
![]() .
.
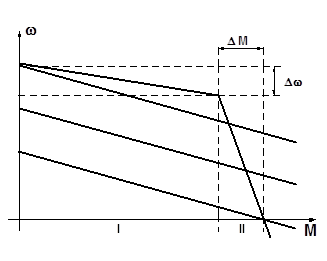
Обеспечение требуемых динамических свойств, определяемых быстродействием, ошибкой, запасами устойчивости, достигается путем введения в структурную схему системы параллельных корректирующих устройств, которые деформируют ОЛАЧХ исходной системы в существенном диапазоне частот ![]() (см. рис.4).
(см. рис.4).
Последовательные корректирующие устройства обладают повышенной чувствительностью к помехам и ухудшают динамику системы при изменении ее параметров.
Замечаем, что в диапазоне частот ![]()
 ,
,
а следовательно
 .
.
Ввиду этого, можно приближенно считать, что в рассматриваемом диапазоне частот ЛАЧХ синтезированной системы определяется ЛАЧХ параллельного корректирующего устройства (так как обе части делятся на одно и то же число):
![]() .
.
С другой стороны, в диапазоне частот ![]() и
и ![]()
![]() .
.
Поэтому
и, следовательно, в рассматриваемых диапазонах справедливо равенство
![]() .
.
Поэтому ОЛЧХ скорректированной системы приближенно можно представить в виде ломаной ABCDEF, как это показано на рис.4. Здесь ОЛЧХ синтезированной САР состоит из тех участков, определяемых охваченной частью  (участки AB иDEF), и прямой ЛАЧХ, определяемой параллельным корректирующим устройством
(участки AB иDEF), и прямой ЛАЧХ, определяемой параллельным корректирующим устройством ![]() (участок BCD), которые оказываются большими по своей ординате.
(участок BCD), которые оказываются большими по своей ординате.

Рис.4.
Похожие работы

... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
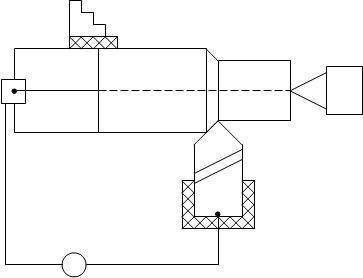
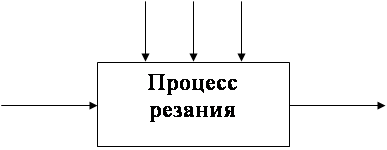
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
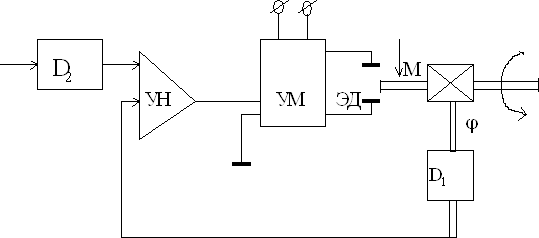
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...


... этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания. 7. Выбор метода и алгоритма адаптивного управления ...
0 комментариев