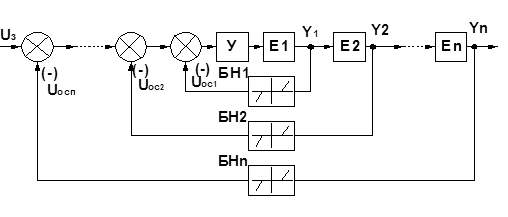
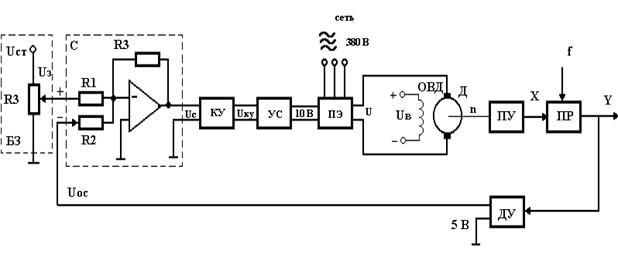
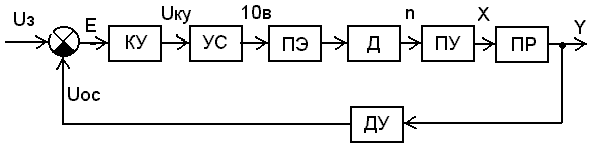
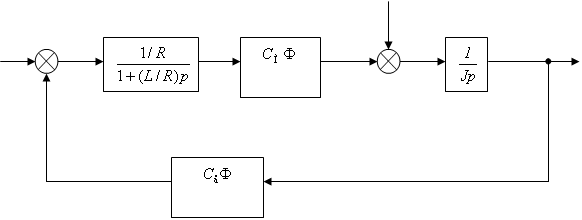
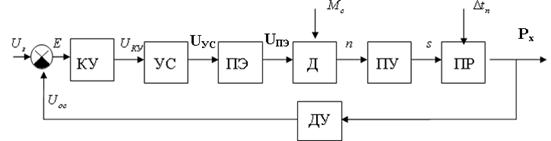
Синтез следящей системы с отрицательной обратной связью по току и по скорости
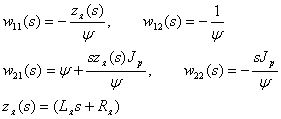
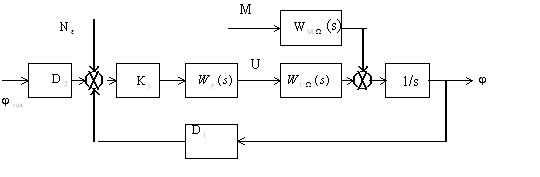
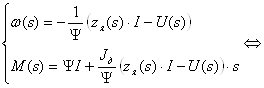
Уравнение второго сумматора
Построение обратной логарифмической частотной характеристики неизменяемой части системы
Синтез последовательного корректирующего устройства
Проверка устойчивости внутреннего контура системы
Расчет элементов следящей системы
Навигация
Синтез последовательного корректирующего устройства
Синтез следящей системы с обратной связью по току и по скорости
21262
знака
4
таблицы
8
изображений
5.1 Синтез последовательного корректирующего устройства
Определяем получившийся коэффициент усиления разомкнутой системы как разность между ординатой ОЛАЧХ неизменяемой части и ординатой ОЖЛАЧХ при частоте ![]() .
.
![]() ;
;
![]() .
.
Введем последовательное корректирующее устройство дифференциально-интегрирующего типа.
Определяем получившуюся суммарную ошибку:
![]() ;
;
После окончания переходного процесса постоянная составляющая скорости изменения задающего процесса будет иметь постоянное значение, а обусловленная ею составляющая ошибки определяется только статикой системы. В статике передаточная функция системы равна ее коэффициенту усиления. Поэтому
 ;
;
Составляющая моментной ошибки:
![]() ;
;
Ток короткого замыкания в якорной цепи двигателя при номинальном напряжении:
![]() ;
;
Номинальная скорость двигателя:
![]() ;
;
![]() ;
;
![]() .
.
Сравним:
![]() ;
;
![]() .
.
Вводим последовательное корректирующее устройство с передаточной функцией:
![]() ;
;
При этом
![]() .
.
Минимальное значение коэффициента усиления, которое обеспечивает удовлетворение условия ![]() .
.
 .
.
Принимаем
![]() и
и ![]() ;
;
Тогда
![]() ;
;
![]() .
.
Корректируем ОЛАЧХ неизменяемой части системы при помощи последовательного корректирующего устройства. Затем сдвигаем полученную ОЛАЧХ вниз до пересечения ее с ОЖЛАЧХ при частоте ![]() . Находим частоту
. Находим частоту ![]() и соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на дополнительном чертеже
и соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на дополнительном чертеже
![]() ;
; ![]() .
.
По передаточной функции последовательного корректирующего устройства, пользуясь справочными данными, выбираем схему последовательного корректирующего устройства. Принципиальная схема последовательного корректирующего устройства имеет вид (см. рис.6.):
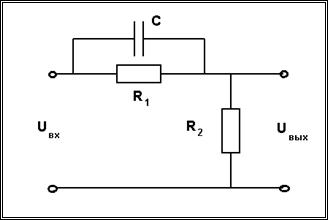
Рис.6.
Передаточная функция имеет вид:
 ;
;
 ;
; ![]() ;
;  ;
; ![]() .
.
Расчет параметров:
![]() ;
;
![]() .
.
Пусть ![]() .
.
Тогда
![]() ;
;
![]() .
.
5.2 Синтез параллельного корректирующего устройства
Потребуем, чтобы ![]() равнялась
равнялась ![]() . Реализация метода ОЖЛАЧХ предполагает, что ОЛАЧХ разомкнутой скорректированной системы должна совпадать с ОЖЛАЧХ, которая построена с учетом заданных показателей качества регулирования. При этом, безусловно, и передаточные функции скорректированной САУ и ОЖЛАЧХ должны быть равны.
. Реализация метода ОЖЛАЧХ предполагает, что ОЛАЧХ разомкнутой скорректированной системы должна совпадать с ОЖЛАЧХ, которая построена с учетом заданных показателей качества регулирования. При этом, безусловно, и передаточные функции скорректированной САУ и ОЖЛАЧХ должны быть равны.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Допустим:
![]() ;
; ![]() ;
;
Тогда
![]() ;
; ![]()
![]() ;
;
![]() ;
;
Допустим
![]() ,
,
Тогда
![]() ;
;
Коэффициент обратной связи по скорости:
![]() .
.
Коэффициент обратной связи по току:
![]() .
.
Реализация такого параллельного корректирующего устройства предполагает соединение двух звеньев со следующими передаточными функциями:
![]() - разделительное звено;
- разделительное звено;
![]() - интегро-дифференцирующее звено.
- интегро-дифференцирующее звено.
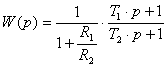
По полученным передаточным функциям параллельного корректирующего устройства, пользуясь справочными данными, выбираем схему параллельного корректирующего устройства (см. рис.6). [5]
Рис.6.
Расчет параметров:
![]() .
.
Пусть ![]() , тогда
, тогда
![]() .
.
![]() ;
;
![]() .
.
Пусть ![]() , тогда
, тогда
![]() .
.
![]() .
.
Похожие работы

... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
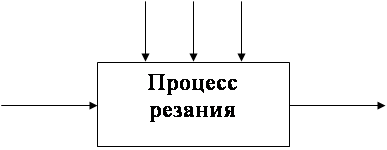
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
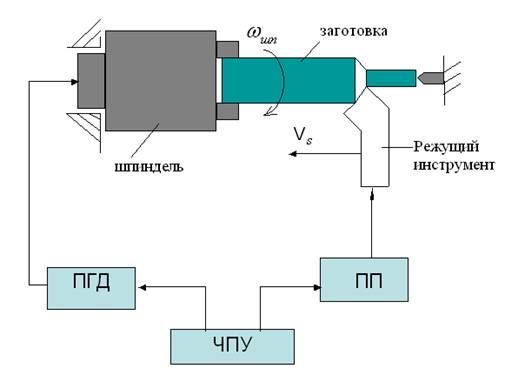


... этого коэффициента и вводила в основной контур корректирующий сигнал, обратно пропорциональный коэффициенту передачи процесса резания. При этом управляющее воздействие привода подачи изменится, значит изменится и скорость вращения двигателя, а следовательно и подача, причем ее изменение будет пропорционально изменению коэффициента резания. 7. Выбор метода и алгоритма адаптивного управления ...
0 комментариев