Навигация
Указать в чем недостатки реостатного регулирования, оценить его КПД
6727
знаков
3
таблицы
8
изображений
5. Указать в чем недостатки реостатного регулирования, оценить его КПД.
2. Решение задачи
По номинальным данным строим механическую характеристику:
![]()
![]()
![]()

![]()
Определяем моменты:
а) пусковой (![]() ) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
![]()
б) Переключения пусковых ступеней (![]() ) – из условия сохранения динамики при переключении пусковых ступеней реостата
) – из условия сохранения динамики при переключении пусковых ступеней реостата
![]()
Полученные характеристики представлены на рисунке 2.
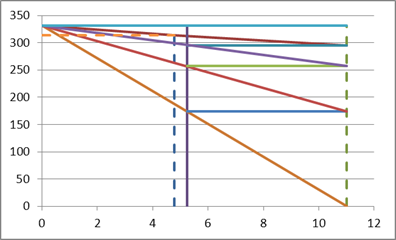
Рис.2. Технические характеристики двигателя
Определяем пусковой резистор ![]() :
:
![]() ,
,
![]() ,
,
![]()
![]() ,
,
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
![]()
![]()
т.к. ![]() , следовательно
, следовательно ![]()
![]()
Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
![]()
![]()
![]()
![]()
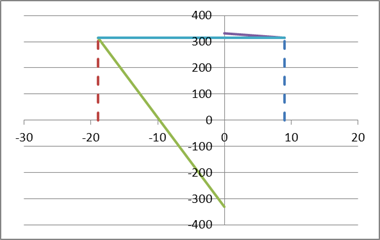
Рис. 3. Характеристика при смене питающего напряжения якоря, при токе ![]()
Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до ![]() при номинальной скорости. Построить соответствующую характеристику:
при номинальной скорости. Построить соответствующую характеристику:
![]()
![]()
![]()
![]()
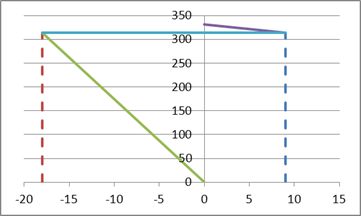
Рис. 4. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
![]()
По номинальным данным строим механическую характеристику:
![]()
![]()
![]()
![]()
Определяем моменты:
а) пусковой (![]() ) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
) – из условия допустимого тока коммутации, т.е. возникновения кругового огня на коллекторе:
![]()
б) Переключения пусковых ступеней (![]() ) – из условия сохранения динамики при переключении пусковых ступеней реостата
) – из условия сохранения динамики при переключении пусковых ступеней реостата
![]()
Полученные характеристики представлены на рисунке 2.1
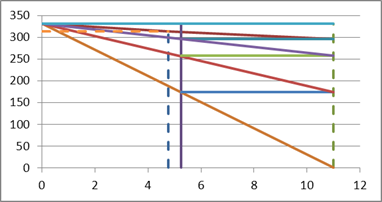
Рис.2.1 Технические характеристики двигателя
Определяем пусковой резистор ![]() :
:
![]() ,
,
![]() ,
,
![]()
![]() ,
,
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Определяем пусковой резистор ![]() :
:
![]()
![]()
![]()
Запишем уравнение механической характеристики с учетом требуемых значений параметров:
![]()
![]()
т.к. ![]() , следовательно
, следовательно

Запишем уравнение скоростной характеристики с учетом требуемых значений параметров:
![]()
![]()
![]()
![]()
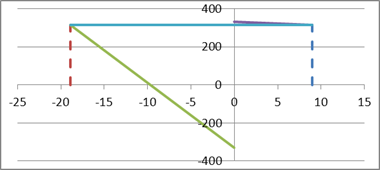
Рис. 2.2. Характеристика при смене питающего напряжения якоря, при токе ![]()
Рассчитать дополнительное сопротивление, ограничивающее в режиме динамического торможения пик тока до ![]() при номинальной скорости. Построить соответствующую характеристику:
при номинальной скорости. Построить соответствующую характеристику:
![]()
![]()
![]()
![]()
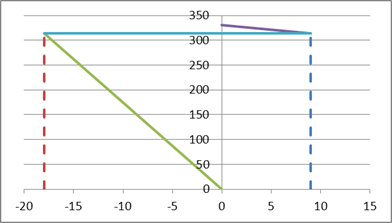
Рис. 2.3. Характеристика двигателя в режиме динамического торможения
При регулировании угловой скорости введением резисторов в цепь якоря, двигателя постоянного тока, потери мощности в этой цепи изменяются пропорционально перепаду угловой скорости. Если момент нагрузки постоянен, постоянна потребляемая мощность и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой из реостата, то есть данный способ регулирования является не экономичным. КПД привода при реостатном регулирование может быть определен по формуле:
![]()
Похожие работы
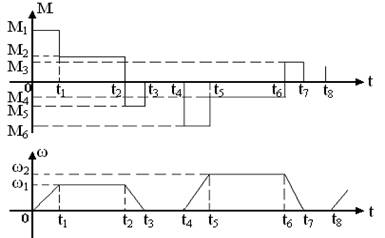
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
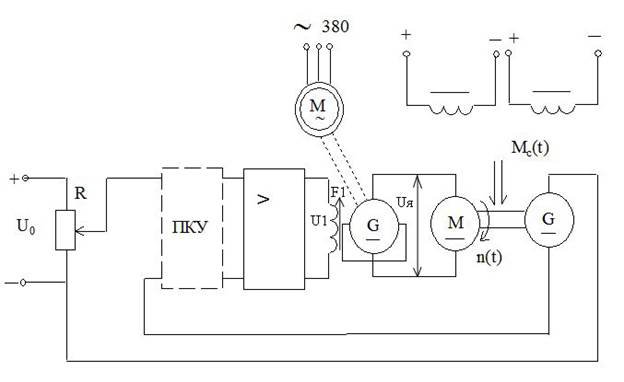
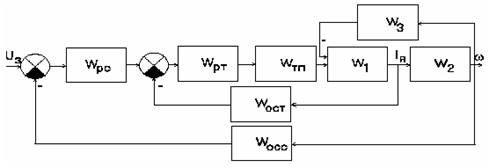
... свидетельствует о том, что это статическая система. 2.3 РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ САР U0 Рисунок 2.1 – Функциональная схема системы автоматического регулирования частоты вращения двигателя постоянного тока с электромашинным усилителем мощности 2.4 АНАЛИЗ ДЕЙСТВУЮЩИХ НА СИСТЕМУ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ, АНАЛИЗ ИХ ВЛИЯНИЯ НА СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ САР К основному, оказывающему самое ...
... Параметры обратного диода Максимально допустимый прямой импульсный ток Iи. пр. max= 60 А Максимально допустимое обратное импульсное напряжение Uи. обр= 400 В Максимальная частота f = 50 кГц 7. Расчет преобразователя При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря ...
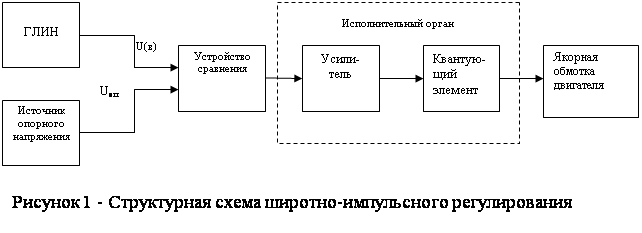
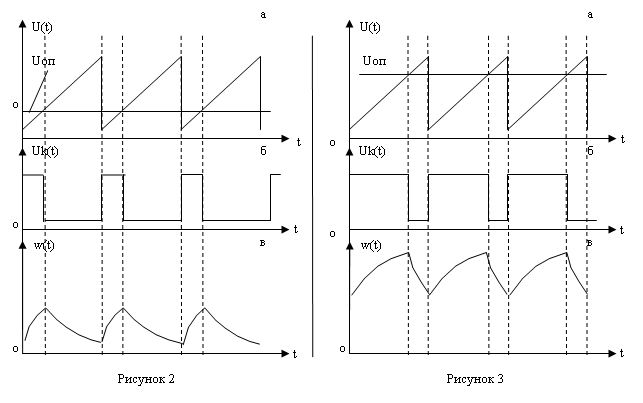
... импульсов tu при неизменном среднем моменте на валу двигателя. В зависимости от соотношения электромагнитной постоянной времени обмотки якоря tя и величины Тu, от схемы управления, момента нагрузки и тока в цепи якоря возможны два основных режима работы двигателя при импульсном управлении: режим прерывистого тока и режим непрерывного тока. Режим прерывистого тока возможен при tя< Тu и ...
0 комментариев