Навигация
Изложить перспективные методы регулирования скорости двигателей переменного тока
6727
знаков
3
таблицы
8
изображений
4. Изложить перспективные методы регулирования скорости двигателей переменного тока.
4. Решение задачи
Построить естественную механическую характеристику:
![]()
![]()

МКР = λ * МН=2*87,04=174,08 Нм
![]()
![]()
М1 = 0,885 * МКР,
М1 = 0,885 * 174,009 = 154.
М2 = 1,1 * МН,
М2 = 1,1 * 87,005 = 95,7.
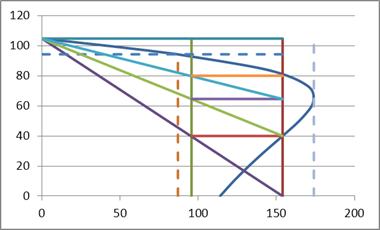
Рис. 4.1. Естественная и пусковые характеристики
Рассчитать сопротивление пускового реостата и построить соответствующие характеристики, если на валу МС = МН.
Определяем пусковой резистор RД1:
RР = 0,466 Ом,
аb = 24,67 мм,
ас = 40,17 мм,
R = RР * (ас/ab),
R = 0,466 * (40,17/24,67) = 0,759 Ом,
RД1 = R – RР,
RД1 = 0,759 – 0,466 = 0,293 Ом.
Определяем пусковой резистор RД2:
аb = 24,67 мм,
аd = 64,67 мм,
R = RР * (аd/ab),
R = 0,466 * (64,67 /24,67) = 1,22 Ом,
RД2 = R – (RР + RД1),
RД2 = 1,22 – (0,466 + 0,293) = 0,461 Ом.
Определяем пусковой резистор RД3 :
аb = 24,67 мм,
ае = 104,67 мм,
R = RР * (аe/ab),
R = 0,466 * (104,67 /24,67) = 1,97 Ом,
RД3 = R – (RР + RД1 + RД2 ),
RД3 = 1,97 – (0,466+ 0,293 + 0,461 ) = 0,289 Ом.
Пусковые характеристики представлены на рис.4.1.
Построить механическую характеристику в режиме динамического торможения при IВ = 2IОН, RДОБ = 0,3RНОМ. Насыщение магнитной системы не учитывать.
Определяем значение эквивалентного переменного тока:
IЭКВ = ![]() *IП*2,
*IП*2,
IЭКВ = ![]() *24,6*2 = 39,85 А
*24,6*2 = 39,85 А
Определяем максимальный момент:
МКР = ![]() ,
,
МКР = ![]() = 11,44 Нм
= 11,44 Нм
Определяем критическое скольжение:
SКР = ![]() ,
,
SКР = ![]() = 0,301.
= 0,301.
М = ![]() ,
,
Результаты расчетов сводим в таблицу 4.1
Таблица. 4.1
| М | S | ω |
| 0 | 0 | 0 |
| -13,4831 | 0,05 | 5,2335 |
| -21,2198 | 0,1 | 10,467 |
| -23,4877 | 0,15 | 15,7005 |
| -22,9107 | 0,2 | 20,934 |
| -21,2906 | 0,25 | 26,1675 |
| -19,4496 | 0,3 | 31,401 |
| -17,6981 | 0,35 | 36,6345 |
| -16,1308 | 0,4 | 41,868 |
| -14,7599 | 0,45 | 47,1015 |
| -13,5692 | 0,5 | 52,335 |
| -12,5348 | 0,55 | 57,5685 |
| -11,6331 | 0,6 | 62,802 |
| -10,8432 | 0,65 | 68,0355 |
| -10,1473 | 0,7 | 73,269 |
| -9,5309 | 0,75 | 78,5025 |
| -8,98184 | 0,8 | 83,736 |
| -8,49022 | 0,85 | 88,9695 |
| -8,04784 | 0,9 | 94,203 |
| -7,64791 | 0,95 | 99,4365 |
| -7,28481 | 1 | 104,67 |
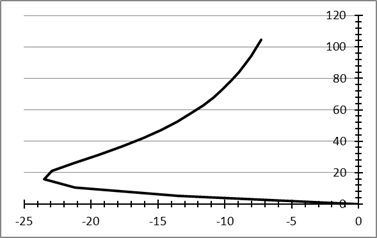
Рис.4.2 Механическая характеристика в режиме динамического торможения.
Похожие работы
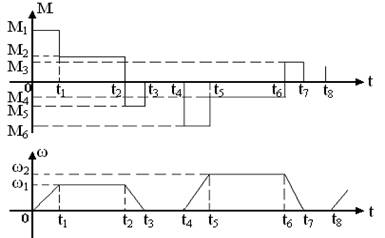
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
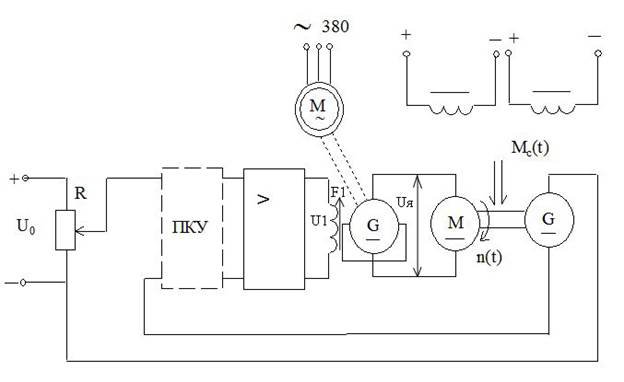
... свидетельствует о том, что это статическая система. 2.3 РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ САР U0 Рисунок 2.1 – Функциональная схема системы автоматического регулирования частоты вращения двигателя постоянного тока с электромашинным усилителем мощности 2.4 АНАЛИЗ ДЕЙСТВУЮЩИХ НА СИСТЕМУ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ, АНАЛИЗ ИХ ВЛИЯНИЯ НА СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ САР К основному, оказывающему самое ...
... Параметры обратного диода Максимально допустимый прямой импульсный ток Iи. пр. max= 60 А Максимально допустимое обратное импульсное напряжение Uи. обр= 400 В Максимальная частота f = 50 кГц 7. Расчет преобразователя При работе нереверсивного ШИП на якорь двигателя постоянного тока возможны два режима: непрерывных токов якоря и прерывистых токов якоря. Режим прерывистых токов якоря ...
... импульсов tu при неизменном среднем моменте на валу двигателя. В зависимости от соотношения электромагнитной постоянной времени обмотки якоря tя и величины Тu, от схемы управления, момента нагрузки и тока в цепи якоря возможны два основных режима работы двигателя при импульсном управлении: режим прерывистого тока и режим непрерывного тока. Режим прерывистого тока возможен при tя< Тu и ...
0 комментариев