Генеральний план і благоустрій
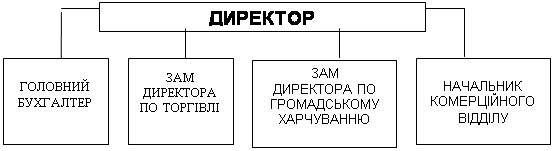
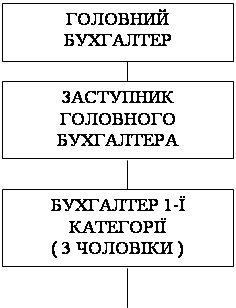
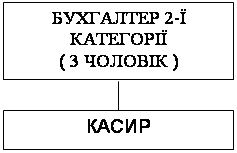
Загальні положення про діяльність філіалу
Санітарно-технічна частина
Розрахунок виробничої програми по централізованому обслуговуванню маршрутних транспортних засобів
Розрахунок річної виробничої програми по технічному обслуговуванню та ремонту рухомого складу
Розрахунок постів та ліній з ТО і ПР
Ритм виробництва – це частина часу роботи зони ТО, яка припадає на одне обслуговування
Розрахунок чисельності виробничого персоналу, допоміжних робітників, ІТП і службовців
Розрахунок та вибір основного технологічного обладнання
Конструкторська частина
Аналіз конструкцій гайковертів
Визначення головного параметру різьбозгвинчуючого обладнання
Аналіз робочого процесу і параметри безударного різьбозгвинчуючого обладнання
Розрахунок планетарної передачі
Відносні числа обертів
Діаметр сонячного колеса
Особливості розрахунку осей сателітів
Планово-попереджувальна система технічного обслуговування і ремонту рухомого складу
Регламентні роботи по ТО маршрутних транспортних засобів
Технологія діагностичних та регулювальних робіт по рульовому керуванню
Якщо причина візуально не очевидна, перевірте ознаку несправності
Визначення загальної суми капітальних вкладень
Визначання економічної ефективності організації поста ТО маршрутних транспортних засобів на базі філії «Темп-Авто»
Навигация
Аналіз робочого процесу і параметри безударного різьбозгвинчуючого обладнання
Проект централізованого технічного обслуговування маршрутних транспортних засобів на базі філії "ТЕМП-АВТО" відкритого акціонерного товариства "РІВНЕ-АВТО"
150155
знаков
24
таблицы
9
изображений
2.5 Аналіз робочого процесу і параметри безударного різьбозгвинчуючого обладнання
Розглянемо метод визначення моменту затягування болтового з’єднання, який створюється робочим органом прямого приводу. Цей метод розробили проф. В.С. Корсаков і В.І. Чаннов.
Будь-яке РЗ має свою індивідуальну характеристику, обумовлену його сумарною податливістю і силами тертя в різьбовій парі і по торцю гайки. Такою характеристикою являється коефіцієнт кутової жорсткості РЗ: Кр=ДМ/Дц.
Цей коефіцієнт показує, на яку величину змінюється крутний момент, який прикладається до гайки, при повороті її на кут Дц.
Кут повороту гайки являється кутом гальмування шпинделя. Чим меньший кут гальмування (тобто більше значення Кр), тим значиміша складова моменту затягування, що створюється кінетичною енергією обертових мас приводу.
Друга складова моменту затягування залежить від статичного крутного моменту, який створюється пневмодвигуном. Ця с складова не являється постійною величиною. Її максимальне значенння Мст досягається при зупинці шпинделя (числова величина приводиться в технічній характеристиці двигуна).
В загальному випадку робота, що затрачається на затягування Азат, складається з двох складових: роботи Аз.д., здійснюваної за рахунок динаміки приводу, і роботи Аз.ст, здійснюваної за рахунок статичного моменту двигуна. Вираз для цих робіт має такий вигляд:
Аз.д.=![]()
Аз.ст=![]() ,
,
де Мш – розрахунковий крутний момент згвинчування на шпинделі (ключі); Мст – максимальний статичний момент; цзат – кут повороту гайки при затягуванні.
Частина енергії (Ау.д.) витрачається на пружну деформацію елементів приводу:
Ау.д.=![]()
де цпр – приведений кут скручування елементів приводу.
Робота на подоланння сил тертя в редукторі приводу буде рівна:
Атр.=ктр(Аз.д.+Ау.д.),
де – ктр =1-з- коефіцієнт втрат на тертя в редукторі; з – ККД редуктора.
Знайдемо кінетичну енергію обертових мас:
![]() ,
,
де Іпр – момент інерції обертових мас, приведений до шпинделя;
щ0 – кутова швидкість шпинделя на холостому ході при вільному нагвинчуванні гайки.
На основі закону збереження механічної енергії можемо записати:
![]() .
.
Кут повороту цзат і кут скручування цпр замінимо відповідними виразами:
![]() ;
; ![]() ,
,
де кпр – коефіцієнт кутової жорсткості приводу.
Підставляючи отримані залежності отримаємо розрахункову формулу:
 =
=![]()
![]() .
.
Визначимо момент згвинчування на ключі при затягуванні болтового з’єднання з різьбою М18 пневматичною силовою головкою (тиск стисненого повітря в магістралі 0,5 МПа). Вихідні дані для розрахунку: Мст = 80,5 Нм; щ0=28,5с-1; Iпр = 0,1687 кг.м2; кпр = 280 Нм; кр = 280 Нм; ктр = 0,15. Числове значення Мш, отримане з допомогою попереднього виразу, рівне 175 Нм, що дуже близько до значення рекомендованого моменту затягування [1].
Для оцінки точності затягування РЗ різьбозгвинчуючим робочим органом використовується коефіцієнт відносної нерівномірності затягування:
![]() ,
,
де Мш.max; Мш.min; Мш.ср – відповідно максимальне, мінімальне і середнє значення моменту згвинчування на шпинделі при затягуванні однотипних РЗ.
В робочих органах прямого приводу г = 0,2…0,35 [1]. Якщо розсіювання значень моменту Мш обмежене, то необхідно зменшити вплив динаміки приводу. Це досягається шляхом зменшення моменту інерції обертових мас (зазвичай ротора двигуна), а також зменшенням коефіцієнта кпр (наприклад, введенням торсіона).
Так як в розглядуваних робочих органах при згвинчуванні РЗ виникають значні реактивні моменти, то їх доцільно використовувати переважно в багатошпиндельних пристроях, де ці моменти взаємно зрівноважуються.
Техніко-економічні показники пневматичного різьбозгвинчуючого обладнання статичної дії в значній мірі визначається характеристиками силового приводу, який включає пневмодвигун (ПД) і трансмісію.
В наш час проектування ротаційних багатокамерних ПД проводиться в основному макетно-експериментальним методом, використовуючи досвід попередніх розробок. Однак більше число врахованих при цьому конструктивних і термодинамічних параметрів затрудняє пошук емпіричним шляхом оптимального рішення. Традиційні методи розрахунку, основані на індикаторних діаграмах, в даному випадку виявились непридатними.
В.А. Чернов і Т.А. Лавриненко вирішили ряд проектних задач шляхом математичного моделювання на ЕОМ.
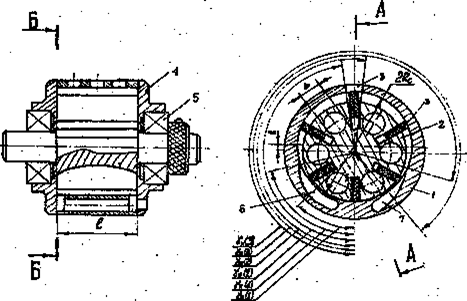
Рис. 2.6. Розрахункова схема реверсивного ротаційного ПД
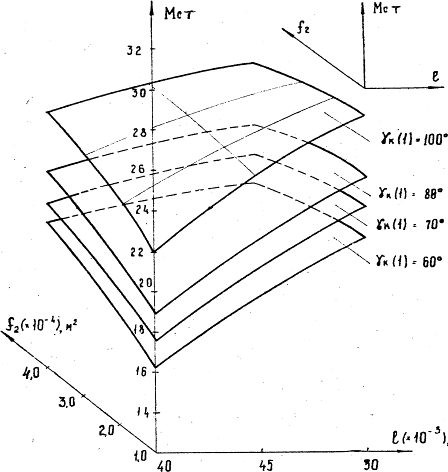
Рис. 2.7. Залежність статичного крутного моменту загальмованого ПД від його основних конструктивних параметрів
В корпусі статора 1 розміщений ротор 2, вісь обертання якого зміщена на ексцентриситет е. В пазах ротора розміщені пластини (лопатки) 3, які під дією відцентрових сил прижимаються до внутрішньої поверхні статора. Кожна пара суміжних лопаток разом з ділянками бокових поверхонь ротора і статора, розміщеними між ними, створює робочу камеру змінного об’єму. З торців ці камери обмежені кришками 4, в яких розміщені підшипники ротора 5. Стиснене повітря поступає в робочі камери через вхідне вікно 6, а видаляється в загальному випадку через вихлопні вікна 7 і 8. Ротаційний ПД може бути реверсивним і нереверсивним. Зміна напрямку обертання ротора в реверсивному ПД здійснюється зміною функцій впускного і випускного каналів. Для того, щоб забезпечити однакові робочі характеристики ПД при різних напрямках обертання ротора, впускні і випускні вікна повинні бути розміщені симетрично відносно осі симетрії.
Характерною особливістю реверсивних ПД являється наявність центрального випускного вікна, яке забезпечує попередій випуск повітря із робочої камери з метою зменшення від’ємної роботи по стисненню повітря при куті повороту ротора більше 180 °.
При математичному моделюванні враховувались слідуючі конструктивні параметри ПД: Rc – внутрішній радіус статора; ![]() – довжина камери; гн (1) і гк (1) – кути початку і кінця випуску повітря через вікно 6; гн (2) и гк (2) – кути початку і кінця центрального вихлопу через вікно 8; гн (3) и гк (3) – кути початку і кінця випуску повітря через вікно 7; f2 - площа центрального вихлопного отвору. В якості основних були вибрані такі параметри: Rc;
– довжина камери; гн (1) і гк (1) – кути початку і кінця випуску повітря через вікно 6; гн (2) и гк (2) – кути початку і кінця центрального вихлопу через вікно 8; гн (3) и гк (3) – кути початку і кінця випуску повітря через вікно 7; f2 - площа центрального вихлопного отвору. В якості основних були вибрані такі параметри: Rc; ![]() ; f2; гн(1); гк(1); гн (2).
; f2; гн(1); гк(1); гн (2).
За критерій якості ПД приймався статичний крутний момент Мст (Нм) загальмованого ПД.
Із графіків слідує, що точка, що відповідає максимальному значенню Мст, визначається оптимальними значеннями конструктивних параметрів ПД: Rc= 24 мм; ![]() = 50 мм; f2=1 см2; гн(1)= 40°; гк(1)= 100°; гн(2) = 175°. При цьому дотримані умови геометричної симетрії реверсивного ПД:
= 50 мм; f2=1 см2; гн(1)= 40°; гк(1)= 100°; гн(2) = 175°. При цьому дотримані умови геометричної симетрії реверсивного ПД:
гн(1)+ гк(3)=2р;
гк(1)+ гн(3)=2р;
гн(2)+ гк(2)=2р.
Найбільший вплив на Мст має кут початку центрального вихлопу, довжина камери (ротора) і площа вихлопного вікна.
Для передачі обертання від високообертових роторів ПД до шпинделя робочого органу використовуються понижуючі планетарні передачі типу 2К – Н (рис. 2.8).
Знайдемо формулу для розрахунку передаточного відношення даного планетарного механізму, для цього скористаємось методом зупинки водила (методом Вілліса). Планетарному механізму надається обертання з кутовою швидкістю, рівною кутовій швидкості водила з протилежним знаком.
Відносний рух ланок при цьому залишається таким, яким він був до зупинки водила. Таким чином, після надання всім ланкам кутової швидкості водила з від’ємним знаком планетарна передача перетворюється в просту, зв’язок між кутовими швидкостями якої можна легко знайти з допомогою відомих залежностей.
Складемо рівняння, що зв’язують кутові швидкості![]() , основних ланок планетарної передачі 2К-Н, де а, b і Н – це відповідні ланки 1, 3 і Н (в нашому випадку
, основних ланок планетарної передачі 2К-Н, де а, b і Н – це відповідні ланки 1, 3 і Н (в нашому випадку ![]() =0).
=0).
Нехай ![]() – кутові швидкості основних ланок a, b і Н. Після надання планетарному механізму додаткового обертання з кутовою швидкістю водила з від’ємним знаком, тобто після того, як додали до
– кутові швидкості основних ланок a, b і Н. Після надання планетарному механізму додаткового обертання з кутовою швидкістю водила з від’ємним знаком, тобто після того, як додали до ![]() величину –
величину – ![]() ланки будуть мати кутові швидкості:
ланки будуть мати кутові швидкості:
![]() ;
; ![]() ;
;
![]()
При непорушному водилі зв’язок між кутовими швидкостями ![]() і
і ![]() такий самий, як між абсолютними кутовими швидкостями в простій передачі, тобто:
такий самий, як між абсолютними кутовими швидкостями в простій передачі, тобто:
![]()
Для планетарної передачі типу 2К-Н маємо:
![]() ,
,
і відповідно,
![]() .
.
Якщо, наприклад, відомо, що ![]() , то з попередньо отриманої формули будемо мати:
, то з попередньо отриманої формули будемо мати:
![]() .
.
На основі цієї формули отримаємо:
![]() .
.
Число зубів коліс передачі вибирається таким чином, щоб виконувались наступні умови:
– співосності Z1+ 2Z2= Z3;
– складання (Z1+ Z3)/C=ціле число;
– сусідства Z2+2<(Z1+ Z3) sin (р/C),
де С – число сателітів.
В результаті спільного рішення даних рівнянь знаходять Z1, Z2, Z3.

Рис. 2.8. Схема планетарної передачі типу 2К-Н
Передачі 2К-Н мають постійний момент на виході, добре забезпечують реверс, мають мінімальну віброактивність. Оптимальний діапазон передаточних відношень і1Н=2,7…8 при ККД 0,96…0,98 [1].
Похожие работы
... необхідно коригувати діючі маркетингові плани; ці пропозиції необхідно враховувати при складанні майбутніх планів. Результати ревізії маркетингу з розробленими рекомендаціями щодо вдосконалення подальшої маркетингової діяльності підприємства з урахуванням змін у маркетинговому середовищі подають вищому керівництву. Рішення щодо прийняття необхідних заходів затверджує рада директорів підприємства. ...

... ) органів держави, тоді як нова система направлена на забезпечення складання звітності для прийняття економічно обгрунтованих управлінських рішень,щодо підвищення ефективності діяльності підприємства. Щодо спеціальної літератури, то нині питанням обліку, аналізу та контролю витрат приділяється особлива увага з боку вітчизняних авторів. Про це свідчать статті спеціалізованих періодичних видань, пі ...
0 комментариев