Обзор методов логического проектирования и минимизации
Общие сведения о минимизации логических функций
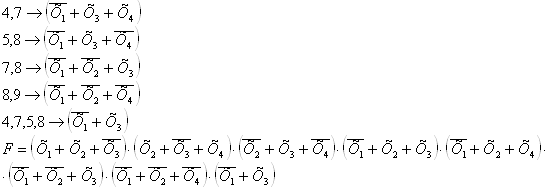
Расчётно-табличный метод минимизации
Возможности программы моделирования Electronics Workbench
Интерфейс Electronics Workbench
Свойства и параметры измерительной аппаратуры, используемой в работе
Математические модели и эквивалентные схемы в программе логического проектирования
Цифровой компаратор 2-х разрядного кода
Методические указания
Об окне Description
Эксплуатационные расходы
Действие техногенных электромагнитных полей СВЧ диапазона на человека
Навигация
Математические модели и эквивалентные схемы в программе логического проектирования
Логическое проектирование и минимизация
99171
знак
23
таблицы
25
изображений
3. Математические модели и эквивалентные схемы в программе логического проектирования
Любой реальный логический элемент(ЛЭ) не мгновенно реагирует на изменения входных сигналов, поэтому имеется некоторая паразитная задержка между моментом времени, в который на его входы поступают новые значения сигналов, и моментом времени, когда выходной сигнал принимает значение, определяемое функцией, которую выполняет ЛЭ. Эта функция представляет собой статическую модель ЛЭ, так как она не учитывает поведение ЛЭ при изменении входных сигналов. Аналогично этому функция f(v) или система функций fq(v):
zq=fq(xn,....,x1),
где zq- выходные сигналы комбинационной схемы,
xp- входные сигналы, p= 1, 2, .....,n, q= 1, 2, ....,k;
описывающая работу комбинационной схемы(КС) без обратных связей, является её статической моделью.
Для исследования переходных процессов, вызываемых в логических схемах(ЛС) изменениями входных сигналов, необходимо ввести динамические модели ЛЭ, учитывающие паразитные задержки. Тогда динамическая модель ЛС будет определятся динамической моделью ЛЭ и статической моделью ЛС. Так, динамическая модель КС без обратных связей будет определятся формой представления функций fq(v), задающей структурную схему (число ЛЭ и все связи между ними), и динамической моделью ЛЭ.
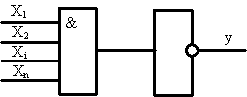
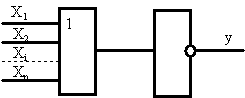
Самая общая динамическая модель ЛЭ И-НЕ, имеющего два входа, представлена на рис.3.1(а).
 а)
а)
 б)
б)
 в)
в)
Рис.3.1 Модели логического элемента ИЛИ-НЕ
Эта модель состоит из безынерционного ЛЭ И-НЕ (статическая часть модели) и паразитных элементов задержки (i=1, 2, 3). Величины задержек и зависят от длины проводников, соединяющих выводы ЛЭ с источниками сигналов, от длительности фронтов входных сигналов x1 и x2, от порогов срабатывания ЛЭ по входам x1 и x2, а величина определяется инерционностью той части ЛЭ И-НЕ, через которую проходит сигнал описываемый функцией x1 x2 .В общем случае точные значения величин i неизвестны, так как они зависят от многих факторов и стечением времени могут изменяться. Кроме того, значения величин i могут быть различными при переходах сигналов x1, x2 и с 0 на 1 и с1 на 0. Рассмотренная модель является наиболее сложной и пригодна для описания любого ЛЭ (И, ИЛИ, ИЛИ-НЕ), если использовать в ней соответствующую статическую модель.
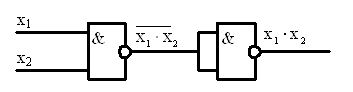
Будем говорить, что входные сигналы ЛЭ не изменяются одновременно, если на интервале изменяется только один сигнал x1 или x2 , и что входные сигналы ЛЭ изменяются одновременно, если на интервале изменяются оба сигнала x1 и x2, так как истинное соотношение величин задержек и неизвестно. Если сигналы x1 и x2 никогда одновременно не изменяются (хотя бы в противоположных направлениях), то модель ЛЭ И-НЕ может быть приведена к виду, показанному на рис.3.1(б), где - элемент задержки с переменной величиной задержки или в зависимости от того, каким сигналом xp вызывается изменение выходного сигнала . Поэтому данную модель назовём динамической моделью с переменной задержкой. Из рис 3.1(б) следует, что:
Обозначив сигналы xp(t)= xp и , получим :
где - значение выходного сигнала ЛЭ в данный момент времени,
- следующее его значение, которое появится через времям
после изменения входных сигналов xp.
Модель с переменной задержкой можно представить в несколько ином виде (рис.3.1(в)), положив, что элемент задержки в момент изменения сигнала xp подключается к тому входу, на который этот сигнал подаётся, а на другом входе элемент задержки в этом случае отсутствует. Данную модель будем называть динамической моделью с виртуальной задержкой.
Логический элемент находится в устойчивом состоянии, если сигналы до элемента задержки и после него совпадают, т.е. если . Если же , то ЛЭ находится в неустойчивом состоянии, так как в этом случае его выходной сигнал должен изменится через время не большее .
 а)
а)
б)
Рис.3.2 Комбинационная схема составленная из логических элементов И и ИЛИ на основании их динамических моделей
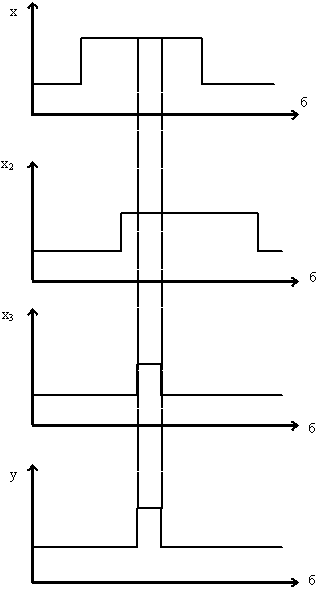
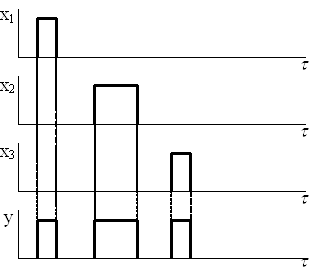
На рис.3.2(а) показана КС, составленная из ЛЭ И и ИЛИ на основании их динамических моделей. Для ЛЭ И использована модель с переменной задержкой, а для ЛЭ ИЛИ - общая модель. Как видно из рис.3.2(а), КС выполняет функцию f(v)=x3 x1+x3 x2, которая является её статической моделью.
Пусть x1= x2=1 и изменяется только один сигнал x3. Тогда функция f(v)=x3 +x3 =1, т.е. из статической модели КС следует, что её выходной сигнал не должен изменятся при изменениях входного сигнала x3. Наличие же паразитных задержек и разной величины приводит к появлению на выходе КС ложных значений выходного сигнала малой длительности (рис.3.2(б)). Так как истинное соотношение величин задержек и неизвестно, то нельзя предугадать, в каком месте появится ложное значение выходного сигнала (при изменении входного сигнала x3 с 0 на 1 или с 1 на 0). Динамические модели ЛЭ и предназначены для формализации исследования поведения ЛС при переходных процессах, вызываемых в них изменениями входных сигналов.
При изменении выходных сигналов двух или большего числа ЛЭ, вызванных одними и теми же изменениями входных сигналов КС, из-за неравенства задержек возникают состязания(гонки) ЛЭ. Состязания ЛЭ называются критическими, или недопустимыми, если хотя бы один выходной сигнал КС во время переходного процесса может изменится более одного раза. Состязания ЛЭ называются некритическими, или допустимыми, если все выходные сигналы КС во время переходного процесса изменяются только один раз.
4. Разработка логических схем практикума
Представленные ниже электрические схемы являются примерами схем синтезируемых в ходе выполнения лабораторной работы.
4.1 Схема цифрового автомата
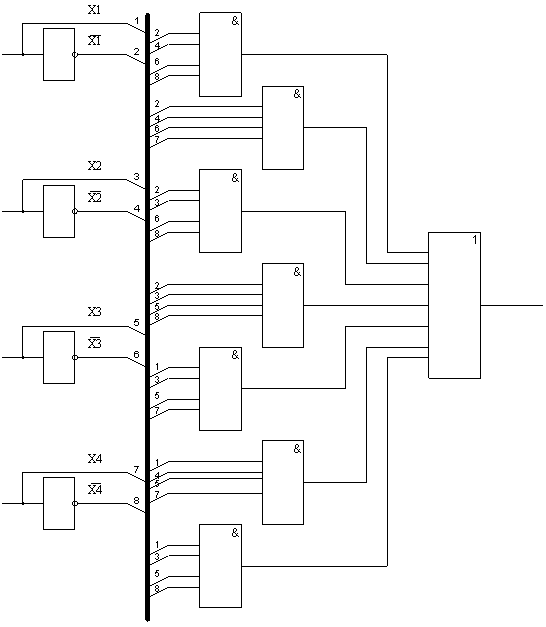
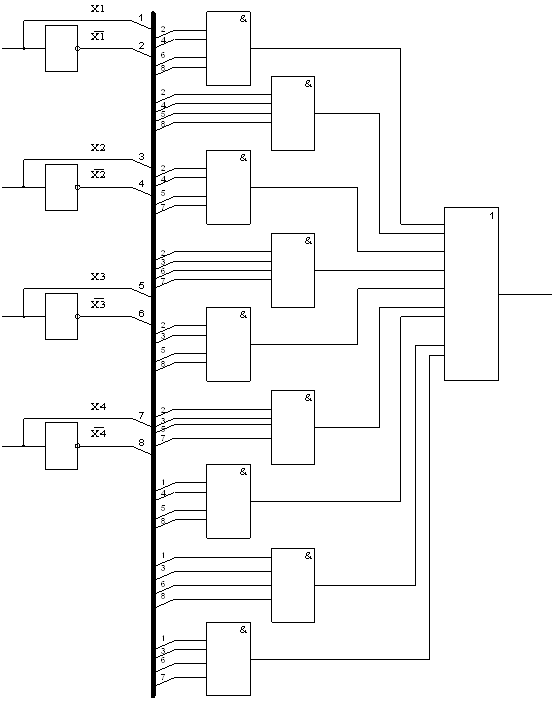
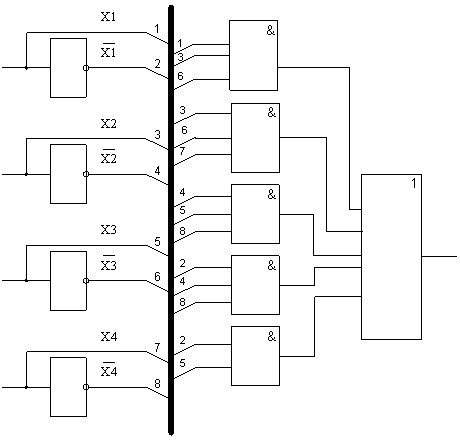
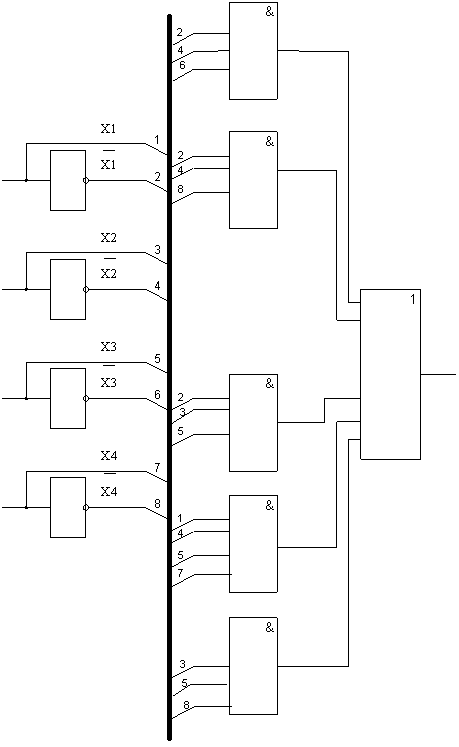
Рис.4.1 Логическая схема к 1-му варианту
Схема изображённая на рис.4.1 представляет из себя цифровой автомат (с 4-мя входами A, B, C и D и выходом Y) реализующий логическое уравнение:
Y=ABC+BCD+BCD+ABCD
Настоящая схема реализована в базисе И-НЕ при помощи логического конвертора.
Похожие работы
... чертеж или схема выполняются в САПР AutoCAD, поэтому наиболее часто используемой вспомогательной программой является конвертор из формата P-CAD в AutoCAD. 1. Основы математического аппарата анализа и синтеза комбинационных логических устройств Все устройства, оперирующие с двоичной информацией, подразделяются на два класса: - комбинационные (дискретные автоматы без памяти). - ...
... , позволяющие минимизировать проектный риск можно разделить на три группы: - диверсификация рисков, позволяющая распределить их между участниками проета; - страхование проектных рисков, которое в условиях переходного периода нашей экономики к рыночным отношениям делает пока что свои первые шаги; - увеличение доли отчислений на непредвиденные обстоятельства. Итак, основными качественно анализа ...
... отсутствует. В результате получили канонические формы представления логической функций, осуществлена минимизация методами Квайна, Квайна-Мак- Класки и карт Вейча, был спроектирован узел цифрового комбинационного устройства. Расчеты были подтверждены моделированием в программе Electronics Workbench. Данная работа может использоваться в качестве пособия, как пример, при изучении методов минимизации ...
... со строгими методами оптимизации образуют жесткую структуру, изменения которой осуществляются разработчиками или специальными лицами, администрирующими информационную компоненту и сопровождающими систему автоматизированного проектирования. Они не являются специалистами в данной предметной области. ЛОГИЧЕСКИЕ МЕТОДЫ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ Предварительно остановимся на изложении некоторых понятий ...
0 комментариев