Навигация
Метод регуляризации нахождения нормального решения
57275
знаков
7
таблиц
0
изображений
3.3. Метод регуляризации нахождения нормального решения
3.3.1. Пусть z° есть нормальное решение системы
Аz = и. (3; 3,1)
Для простоты будем полагать, что приближенной может быть лишь правая часть, а оператор (матрица) А — точный.
Итак, пусть вместо и мы имеем вектор и, || и — и || <=d ; т. е. вместо системы (3;3,1) имеем систему
| (3; 3,2) |
| Аz = u. |
Требуется найти приближение zd к нормальному решению системы (3;3,1), т. е. к вектору z° такое, что zdàz° при d à0. Отметим, что векторы u и u (один из них или оба) могут не удовлетворять классическому условию разрешимости.
Поскольку система (3; 3,1) может быть неразрешимой, то inf ||Az-u|| = m >=0, где inf берется по всем векторам z Î Rn.
Естественно искать приближения zd в классе Qd векторов z, сопоставимых по точности с исходными данными, т. е. таких, что || Az – u ||<=m+d. Но поскольку вместо вектора u мы имеем вектор u, то мы можем найти лишь
m=inf || Az – u ||.
zÎ Rn
Отметим, что из очевидных неравенств
||Az – u ||<=||Az – u || + || u – u || ,
||Az – u ||<= || Az – u || + ||u – u ||
следуют оценки m<=m+d, m<=m+d, приводящие к неравенству | m — m | <=d. Поэтому будем искать приближение zd к нормальному решению z° в классе Qd векторов z, для которых || Аz — и || <=m +2d. Отметим, что если имеется информация о разрешимости системы (3;3,1), то m = 0 и в качестве класса Qd можно брать класс векторов z, для которых || Аz — и|| <= d. Класс Qd есть класс формально возможных приближенных решений.
Но нельзя в качестве zd брать произвольный вектор из класса Qd, так как такое «приближение» будет неустойчивым к малым изменениям правой части уравнения (3;3,2). Необходим принцип отбора. Он естественным образом вытекает из постановки задачи. В самом деле согласно определению нормального решения искомое решение z° должно быть псевдорешением с минимальной нормой. Поэтому в качестве приближения к z° естественно брать вектор zd из Qd, минимизирующий функционал
W[ z ] = ||z||2 на множестве Qd .
Таким образом, задача сводится к минимизации функционала W[ z ] = ||z||2 на множестве Qd векторов z, для которых выполняется условие || Аz — u || <=m +2d.
3.3.2. Пусть zd — вектор из Qd, на котором функционал ||z||2 достигает минимума на множестве Qd. Его можно рассматривать как результат применения к правой части u уравнения (3; 3,2) некоторого оператора R1(u, d), зависящего от параметра d. Справедлива
Теорема 1. Оператор R1(u, d) обладает следующими свойствами:
1) он определен для всякого uÎRm и любого d > 0;
2) при d à0 zd== R1(u, d) стремится к нормальному решению z° уравнения Аz=u, т. е. он является регуляризирующим для уравнения Аz=u .
3.3.3. Пусть zd — вектор, на котором функционал W[ z ] = ||z||2 достигает минимума на множестве Qd. Легко видеть из наглядных геометрических представлений, что вектор zd лежит на границе множества Qd, т.е. ||Azd- u ||=m +2d =d1.
Это следует непосредственно также из того, что функционал W[ z ] = ||z||2 является сстабилизирующим и квазимонотонным. Стабилизирующий функционал W[ z ] называется квазимонотонным , если каков бы ни был элемент z из F1 , не принадлежащий множеству M0 , в любой его окрестности найдется элемент z1 из F1, для которого W[ z1 ]< W[ z ], т.е. если функционал не имеет локальных минимумов на множестве F1\ M0.Задачу нахождения вектора zd можно поставить так: среди векторов z, удовлетворяющих условию ||Az – u ||=m +2d , найти вектор zd с минимальной нормой, т. е. минимизирующий функционал W[ z ]=||z||2.
Последнюю задачу можно решать методом Лагранжа, т. е. в качестве zdбрать вектор za, минимизирующий функционал
Мa [z, u] = ||Az - u ||2+ a||z||2, a>0,
с параметром a, определяемым по невязке, т. е. из условия ||Аza— u||=d1. При этом параметр a определяется однозначно .
3.3.4. Поскольку Мa [z, u] — квадратичный функционал, то для любых u ÎRm и a> 0 существует лишь один минимизирующий его вектор za. В самом деле, допустим,
что существуют два вектора za и za, минимизирующие его. Рассмотрим векторы z, расположенные на прямой (пространства Rn), соединяющей za и za:
z = za + b( za - za).
Функционал Мa [z, u] на элементах этой прямой есть неотрицательная квадратичная функция от b. Следовательно, она не может достигать наименьшего значения при двух различных значениях b: b = 0 (z = za) и b=1 (z = za).
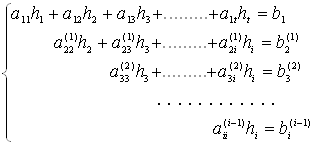
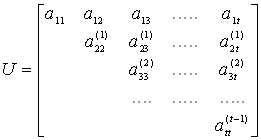
Компоненты zja вектора za являются решением системы линейных алгебраических уравнений

получающихся из условий минимума функционала Мa [z, u]:
Здесь

Компоненты zja могут быть определены и с помощью какого-нибудь другого алгоритма минимизации функционала Мa [z, u].
Вектор za можно рассматривать как результат применения к u некоторого оператора za=R(u, a), зависящего от параметра a.
Покажем, что оператор R0(u, a) является регуляризирующим для системы (3;3,1), т. е. обладает свойствами 1) и 2) определения 2 (см. 3.1.2.). В п. 3.3.2. было сказано, что он определен для всяких u ÎRm и a > О и, следовательно, обладает свойством 1). Теперь покажем справедливость свойства 2), т. е. существование таких функций a=a(d) , что векторы za(d) = R0(u, a(d)) сходятся к нормальному решению z° системы (3; 3,1) при dà0. Это непосредственно следует из приводимой ниже теоремы 2.
Теорема 2( Тихонова). Пусть z° есть нормальное решение системы Az= u и вместо вектора u мы имеем вектор u такой, что ||u—u||<=d. Пусть, далее, b1(d) и b2(d) — какие-либо непрерывные на [0, d2] и положительные на (0, d2] функции, монотонно стремящиеся к нулю при dà 0 и такие, что
![]()
Тогда для любой .положительной на (0, d2] функции a=a(d) , удовлетворяющей условиям
![]()
векторы za(d) = R0(u, a(d)) сходятся к нормальному решению z0 системы Az = u при dà0, т. е.
![]()
Примечание. Доказательства теорем в данном разделе опущены, т.к. основной теоретической частью работы является раздел «Метод Подбора. Квазирешения». Метод Тихонова описан из-за использования его в численном эксперименте.
ЗАКЛЮЧЕНИЕ
Для реализации численного примера был выбран метод Тихонова решения плохо обусловленных СЛАУ. В качестве исходной была взята СЛАУ Az=u, имеющая в матричной записи вид:
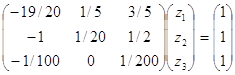
Определитель матрицы коэффициентов этой системы близок к нулю – он равен 0.000125. Попробуем решить эту систему с помощью обратной матрицы:
z=A-1u
Получим z1=316
z2=-990
z3=832
Теперь предположим, что правая часть нам известна приближенно, с погрешностью 0.1 Изменим, к примеру, третий элемент вектора-столбца с 1 на 1.1 :
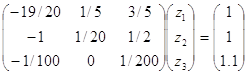
Попробуем решить новую систему также с помощью обратного оператора. Мы получаем другой результат:
z1=348
z2=-1090
z3=916.
Мы видим, что малому изменению правой части данной системы отвечают весьма значительные изменения решения. Очевидно, эта система – плохо обусловленная, и здесь не может идти речи о нахождении решения близкого к точному с помощью обратного оператора.
Будем искать решение методом Тихонова. В теоретической части было показано, что целесообразно использовать регуляризирующий оператор следующего вида: (aE + ATA)za=ATud , где E – единичная матрица, za -- приближенное нормальное решение, AT – транспонированная исходная матрица, a -- параметр регуляризации,
ud -- правая часть, заданная неточно. Эту задачу можно решать стандартными методами, задав предварительно функцию a=a(d) , удовлетворяющую условиям теоремы Тихонова. В моем примере это функция a(d)=d/4d. Далее будем решать регуляризованную задачу с точностью e=0.001 ,последовательно изменяя значения a.
В качестве контр-примера можно подставить в программу любую функцию a(d) , не удовлетворяющую условиям теоремы Тихонова. Любая положительная функция монотонно возрастающая, не обладающая свойством a(d)à0 при dà0, не будет минимизировать невязку.
Текст программы приведен в приложении 1. Полная распечатка результатов приведена в приложении 2. Здесь же представлены окончательные значения на выходе из программы.
Приближение к нормальному решению
Z(1)= 3.47834819174013E+0002
Z(2)=-1.08948394975175E+0003
Z(3)= 9.15566443137791E+0002
Значение правой части при подстановке прибл. решения
U1(1)= 9.99997717012495E-0001
U1(2)= 1.00000741970775E+0000
U1(3)= 1.09948402394883E+0000
Значение параметра регуляризации:
2.61934474110603E-0010
ПРИЛОЖЕНИЯ
Приложение 1.
Текст программы для реализации метода Тихонова на языке PASCAL
Uses CRT;
type
real=extended;
const
matrixA: array[1..3,1..3] of real = ((-19/20,1/5, 3/5),
(-1 ,0.1, 0.5),
(-0.01 ,0 ,1/200));
One: array [1..3,1..3] of real = ((1,0,0),
(0,1,0),
(0,0,1));
U:array[1..3] of real = (1,1,1.1);
var
i,j,k,q:byte;
A,At,A1,A2,Ar,One1:array[1..3,1..3] of real;
delta,Det,S,alpha:real;
B,Z,U1:array[1..3] of real;
f:text;
Procedure TransA;
begin
for i:=1 to 3 do
for j:=1 to 3 do
At[i,j]:=A[j,i]
end;
Function Koef(par1,par2:byte):real;
var
Sum:byte;
Tmp:real;
begin
Sum:=par1+par2;
Tmp:=1;
for k:=1 to sum do
Tmp:=Tmp*(-1);
Koef:=Tmp;
end;
Function AlAdd(par1,par2:byte):real;
type
element=record
value:real;
flag:boolean;
end;
var
BB:array[1..2,1..2] of real;
AA:array[1..3,1..3] of element;
k,v,w:byte;
N:array[1..4] of real;
P1:real;
begin
for v:=1 to 3 do
for w:=1 to 3 do begin
AA[v,w].value:=A2[v,w];
AA[v,w].flag:=true
end;
for v:=1 to 3 do AA[par1,v].flag:=false;
for v:=1 to 3 do AA[v,par2].flag:=false;
{ for v:=1 to 3 do begin
for w:=1 to 3 do write(AA[i,j].value:2:3,' ');
writeln
end; }
k:=1;
for v:=1 to 3 do
for w:=1 to 3 do
begin
if AA[v,w].flag then
begin
N[k]:=AA[v,w].value;
{ writeln(N[k]);}
k:=k+1
end;
end;
BB[1,1]:=N[1]; BB[1,2]:=N[2];
BB[2,1]:=N[3]; BB[2,2]:=N[4];
{ writeln('alg dop',par1,par2,' ',BB[1,1]*BB[2,2]-BB[1,2]*BB[2,1]);}
AlAdd:=BB[1,1]*BB[2,2]-BB[1,2]*BB[2,1];
end;
Function DetCount:real;
var
S1:real;
z:byte;
begin
S1:=0;
for z:=1 to 3 do S1:=S1+A2[1,z]*Koef(1,z)*AlAdd(1,z);
DetCount:=S1;
end;
Procedure RevMatr;
begin
for i:=1 to 3 do
for j:=1 to 3 do
Ar[j,i]:=Koef(i,j)*AlAdd(i,j)/DetCount;
{ for i:=1 to 3 do begin
for j:=1 to 3 do write(Ar[i,j],' ');
writeln;
end;}
end;
Function AllRight:boolean;
begin
writeln(f,'Ґўп§Є Ї® 1-¬г н«-вг',(abs(U[1]-U1[1])));
writeln(f,'Ґўп§Є Ї® 2-¬г н«-вг',(abs(U[2]-U1[2])));
writeln(f,'Ґўп§Є Ї® 3-¬г н«-вг',(abs(U[3]-U1[3])));
writeln(F);
if (abs(U[1]-U1[1])<0.001) and (abs(U[2]-U1[2])<0.001) and
(abs(U[3]-U1[3])<0.001) then AllRight:=true
else AllRight:=false
end;
Function Pow(par1:real;par2:byte):real;
var
S2:real;
z:byte;
begin
S2:=1;
if par2=0 then begin
Pow:=1;
exit
end
else
for z:=1 to par2 do S2:=S2*par1;
Pow:=S2;
end;
BEGIN
clrscr;
Assign(f,'c:\tikh.txt');
Rewrite(f);
for i:=1 to 3 do
for j:=1 to 3 do
A[i,j]:=matrixA[i,j];
TransA;
Det:=0.000125;
{----------------------------}
for i:=1 to 3 do begin
S:=0;
for j:=1 to 3 do begin
S:=S+At[i,j]*U[j];
B[i]:=S
end;
end;
{----------------------------}
for i:=1 to 3 do
for j:=1 to 3 do
begin
S:=0;
for k:=1 to 3 do begin
S:=S+At[i,k]*A[k,j];
A1[i,j]:=S
end
end;
{-----------------------------}
q:=1;
repeat
alpha:=q/pow(4,q);
for i:=1 to 3 do
for j:=1 to 3 do
One1[i,j]:=One[i,j]*alpha;
for i:=1 to 3 do
for j:=1 to 3 do
A2[i,j]:=One1[i,j]+A1[i,j];
RevMatr;
{------------------------------}
for i:=1 to 3 do begin
S:=0;
for j:=1 to 3 do begin
S:=S+Ar[i,j]*B[j];
Z[i]:=S
end;
end;
for i:=1 to 3 do begin
S:=0;
for j:=1 to 3 do begin
S:=S+A[i,j]*Z[j];
U1[i]:=S
end
end;
q:=q+1;
until AllRight;
{------------------------------}
clrscr;
writeln('ЏаЁЎ«Ё¦ҐЁҐ Є ®а¬ «м®¬г аҐиҐЁо');
for i:=1 to 3 do writeln('Z(',i,')=',z[i]);
writeln;
writeln('‡ 票Ґ Їа ў®© з бвЁ ЇаЁ Ї®¤бв ®ўЄҐ ЇаЁЎ«. аҐиҐЁп');
for i:=1 to 3 do writeln('U1(',i,')=',U1[i]);
writeln;
writeln('‡ 票Ґ Ї а ¬Ґва ॣг«паЁ§ жЁЁ:');
writeln(alpha);
Close(f);
readln;
END.
Приложение 2.
Распечатка результатов пересчета на каждом шаге
невязка по 1-му эл-ту 7.75620788018006E-0002
невязка по 2-му эл-ту 9.12970302562861E-0002
невязка по 3-му эл-ту 1.09101153877771E+0000
невязка по 1-му эл-ту 3.51667654246499E-0002
невязка по 2-му эл-ту 4.81631787337596E-0002
невязка по 3-му эл-ту 1.09057642915500E+0000
невязка по 1-му эл-ту 8.14255746519741E-0003
невязка по 2-му эл-ту 1.75271999674588E-0002
невязка по 3-му эл-ту 1.09024740493812E+0000
невязка по 1-му эл-ту 1.64128226088452E-0004
невязка по 2-му эл-ту 1.40420815653456E-0003
невязка по 3-му эл-ту 1.09002512985506E+0000
невязка по 1-му эл-ту 1.09651876415789E-0003
невязка по 2-му эл-ту 8.01044623892439E-0003
невязка по 3-му эл-ту 1.08980075500722E+0000
невязка по 1-му эл-ту 3.24092274239579E-0003
невязка по 2-му эл-ту 1.28969442769472E-0002
невязка по 3-му эл-ту 1.08943309314635E+0000
невязка по 1-му эл-ту 4.29878415191160E-0003
невязка по 2-му эл-ту 1.47864580098997E-0002
невязка по 3-му эл-ту 1.08840358157784E+0000
невязка по 1-му эл-ту 4.64764022304719E-0003
невязка по 2-му эл-ту 1.53489294761093E-0002
невязка по 3-му эл-ту 1.08488736141985E+0000
невязка по 1-му эл-ту 4.70263264899617E-0003
невязка по 2-му эл-ту 1.53524096326819E-0002
невязка по 3-му эл-ту 1.07252416252061E+0000
невязка по 1-му эл-ту 4.54618391386039E-0003
невязка по 2-му эл-ту 1.47935415193105E-0002
невязка по 3-му эл-ту 1.03007092553528E+0000
невязка по 1-му эл-ту 3.97950585276394E-0003
невязка по 2-му эл-ту 1.29378307693635E-0002
невязка по 3-му эл-ту 9.00028069734717E-0001
невязка по 1-му эл-ту 2.71895340473448E-0003
невязка по 2-му эл-ту 8.83742514077426E-0003
невязка по 3-му эл-ту 6.14624514462952E-0001
невязка по 1-му эл-ту 1.25089904346179E-0003
невязка по 2-му эл-ту 4.06552487723671E-0003
невязка по 3-му эл-ту 2.82729125073012E-0001
невязка по 1-му эл-ту 4.15581257891512E-0004
невязка по 2-му эл-ту 1.35064829843828E-0003
невязка по 3-му эл-ту 9.39264706989556E-0002
невязка по 1-му эл-ту 1.18814900667952E-0004
невязка по 2-му эл-ту 3.86149131520602E-0004
невязка по 3-му эл-ту 2.68533566153482E-0002
невязка по 1-му эл-ту 3.22671215741144E-0005
невязка по 2-му эл-ту 1.04868192738639E-0004
невязка по 3-му эл-ту 7.29267248287954E-0003
невязка по 1-му эл-ту 8.61328853146714E-0006
невязка по 2-му эл-ту 2.79931897352870E-0005
невязка по 3-му эл-ту 1.94668264668650E-0003
невязка по 1-му эл-ту 2.28298750498679E-0006
невязка по 2-му эл-ту 7.41970775380851E-0006
невязка по 3-му эл-ту 5.15976051172231E-0004
Приближение к нормальному решению
Z(1)= 3.47834819174013E+0002
Z(2)=-1.08948394975175E+0003
Z(3)= 9.15566443137791E+0002
Значение правой части при подстановке прибл. решения
U1(1)= 9.99997717012495E-0001
U1(2)= 1.00000741970775E+0000
U1(3)= 1.09948402394883E+0000
Значение параметра регуляризации:
2.61934474110603E-0010
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ1.А.Н.ТИХОНОВ, В.Я.АРСЕНИН «МЕТОДЫ РЕШЕНИЯ НЕКОРРЕКТНЫХ ЗАДАЧ» – МОСКВА «НАУКА» 1979.
2.Г.И.МАРЧУК «МЕТОДЫ ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ» – МОСКВА «НАУКА» 1977.
3.Л.И.ГОЛОВИНА «ЛИНЕЙНАЯ АЛГЕБРА И НЕКОТОРЫЕ ЕЕ ПРИЛОЖЕНИЯ» – МОСКВА «НАУКА» 1975.
4.В.И.РАКИТИН, В.Е.ПЕРВУШИН «ПРАКТИЧЕСКОЕ РУКОВОДСТВО ПО МЕТОДАМ ВЫЧИСЛЕНИЙ» – МОСКВА «ВЫСШАЯ ШКОЛА» 1998.
5.В.В.ФАРОНОВ «ПРОГРАММИРОВАНИЕ НА ПЕРСОНАЛЬНЫХ ЭВМ В СРЕДЕ TURBO PASCAL» -- ИЗДАТЕЛЬСТВО МГТУ 1990.
Похожие работы
... , действующий из нормированного пространства Z в нормированное пространство U. В 1963 г. А.Н.Тихонов дал знаменитое определение регуляризирующего алгоритма (РА), которое лежит в основе современной теории некорректно поставленных задач. Определение. Регуляризирующим алгоритмом (регуляризирующим оператором) называется оператор, обладающий двумя следующими свойствами: 1) определен для любых δ ...
... при решении предусмотренных задач одна из эталонных схем (рабочая) копируется в рабочие файлы. Для моделирования, анализа и хранения режимов создана база режимов (до 12 режимов). Предусмотрена возможность записи произвольного режима, являющегося результатом решения одной из задач, в базу режимов. Все расчеты, включая и формирование отображаемых на дисплеях кадров, производятся на ЭВМ ИВП. В ИВП ...

... из-за дефектов производства, технологии изготовления, загрязнения поверхности, погрешности измерения и обработки экспериментальной информации. Влияние погрешностей исходной информации на решение обратной задачи теплопроводности оценивалось с помощью метода статистических испытаний Монте – Карло / 5-8 /. Анализ результата статистического моделирования решения обратной задачи позволяет установить ...
... и получим . ЧТД. Пример. Вычислим значение , где . Действие Содержимое НГ ВГ (1) x 2.57 2.58 (2) y 1.45 1.46 (3) z 8.33 8.34 (1)+(2) x+y 4.02 4.04 (1)-(2) x-y 1.11 1.13 9.24 9.43 2.28 2.35 §8. Математические модели и численные методы.Велика роль математики в решении задач реального мира. Физиков математика интересует не сама по ...
0 комментариев