Навигация
Специальный фильтр оценки градиента
12853
знака
0
таблиц
81
изображение
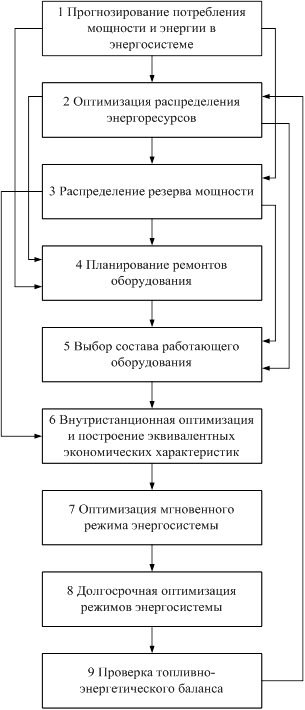
1.4.5. Специальный фильтр оценки градиента
Этот метод предполагает введение в систему специальную динамическую систему, промежуточный сигнал которой равен частной производной.

![]()
![]()
![]() y
y
![]()
![]()
![]()
![]()
![]() Z
Z
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ДФ Р
ДФ Р ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
G
Рис. 1.12. Схема специального фильтра оценки частной производной
T-
постоянная
времени фильтра ![]()
![]() ;
;
![]() ; (1.20)
; (1.20)
При
![]() :
:
 (1.21)
(1.21)
Для оценки полной производной Y используют ДФ – дифференцирующий фильтр, а затем эта оценка полной производной применяется для оценки градиента.
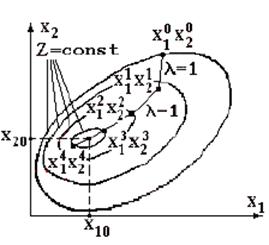
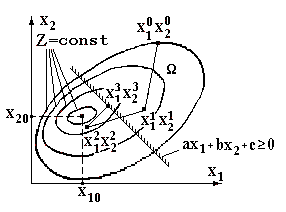
1.5. Организация движения к экстремуму
1.5.1. Системы первого порядка
 (1.22)
(1.22)
Организуем закон управления пропорционально градиенту:
![]()
 (1.23)
(1.23)
Запишем уравнение замкнутой системы:
![]() - нелинейное
дифференциальное
уравнение (1.24)
- нелинейное
дифференциальное
уравнение (1.24)
Это обычное дифференциальное уравнение, которое можно исследовать методами ТАУ.
Рассмотрим уравнение статики системы:
![]() т.к.
т.к. ![]() ,
то из уравнения
следует, что
,
то из уравнения
следует, что
![]()
![]() (1.25)
(1.25)
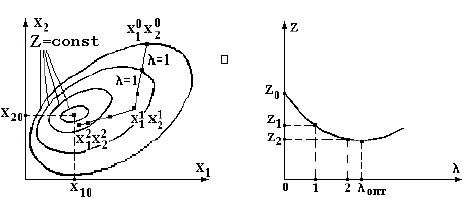
Если с помощью коэффициента усиления k обеспечить устойчивость замкнутой системы, то автоматически в статике мы придём в точку экстремума. В некоторых случаях с помощью коэффициента k можно кроме устойчивости обеспечить определённую длительность переходного процесса в замкнутой системе, т.е. обеспечить заданное время выхода на экстремум.
Пример:
![]() ;
; ![]() ;
;
![]() ;
;
![]()
![]() где
k – устойчивость >0
где
k – устойчивость >0
![]()
![]()
 =1
=1
U=-y
 -
- ![]()
БОГ
G
Рис. 1.13. Функциональная схема градиентной экстремальной системы первого порядка
Этот способ годится только для унимодальных систем, т.е. систем с одним глобальным экстремумом.
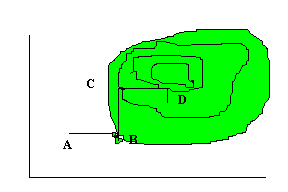
1.5.2. Метод тяжёлого шарика
По аналогии с шариком, который скатывается в овраг и проскакивает точки локальных экстремумов, система АУ с колебательными процессами также проскакивает локальные экстремумы. Для обеспечения колебательных процессов в систему первого порядка вводим дополнительную инерционность.
 -
- ![]()
БОГ T-?
 G
G
Рис. 1.14. Иллюстрация метода “тяжёлого” шарика
![]()
G =
y; 
![]() -
уравнение
замкнутой
системы;
-
уравнение
замкнутой
системы;
![]() - характеристическое
уравнение
системы. (1.26)
- характеристическое
уравнение
системы. (1.26)
![]()
 d
d
Похожие работы
... luc – программа используется для разложения матрицы на треугольные сомножители; rluc – программа, которая отвечает за решение системы уравнений. 4. Разработка адаптивной системы управления режимами электропотребления 4.1 Функции автоматизированной системы Сбор, накопление и передача информации, характеризующей режим электропотребления комбината (информация о нагрузках). Сбор, накопление ...


... время решающее значение приобретает четкая аналитическая формулировка алгоритма решения задачи и реализация его с помощью ЭВМ.1.СИНТЕЗ СИСТЕМЫ УПРАВЛЕНИЯ КВАЗИСТАЦИОНАРНЫМ ОБЪЕКТОМ 1.1Построение информационной управляющей системы с элементами самонастройки. Для нестационарного динамического объекта управления, поведение которого описывается нестационарными дифференциальными уравнениями вида (1.1): ...
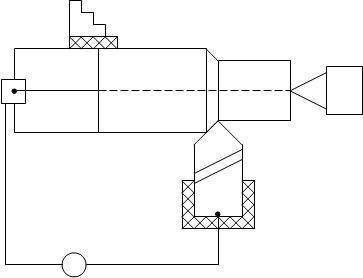
ости обработки. Для измерения этой температуры и управления процессом обработки наибольшее распространение нашел метод естественной термопары, образованной инструментом и деталью. Развиваемая естественной термопарой термо-ЭДС позволяет построить АСУ ТП, поддерживающую заданный температурный режим с точностью 2...3 %. Для успешного построения системы стабилизации температуры резания (СТР) ...
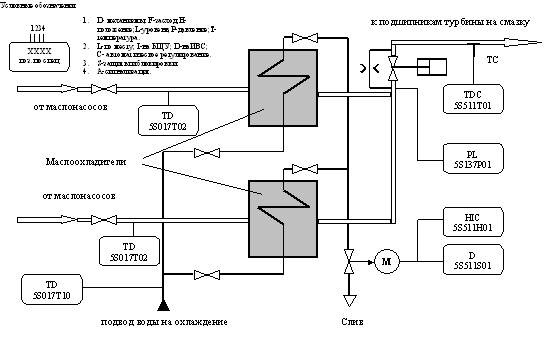
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...
0 комментариев