Навигация
Недостатки статической балансировки
101600
знаков
8
таблиц
32
изображения
2.2 Недостатки статической балансировки.
Недостаток статической балансировки заключается в том, что она не может обнаружить неуравновешенные пары сил и часто способствуют их появлению, ухудшая тем самым сбалансированность ротора. Кроме того, после статической балансировки, даже при отсутствии неуравновешенных пар сил, всегда остается значительный остаточный дисбаланс, обусловленный силами трения, действующими на цапфы балансируемого ротора во время балансировочного процесса. Рассмотрим недостатки статической балансировки на примерах.
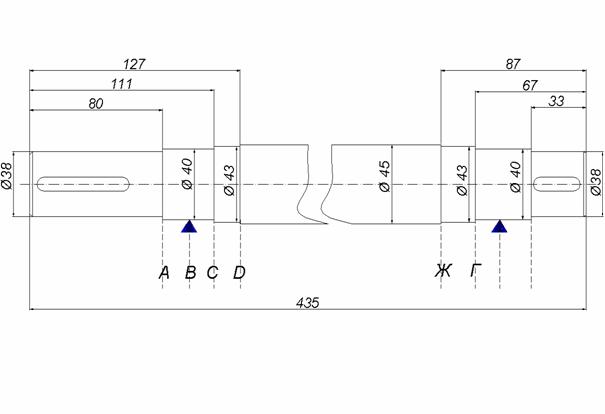
Пусть ротор турбогенератора имеет в плоскостях диска турбины и балансировочного кольца некоторые дисбалансы:
ЅD1Ѕ=ЅD2Ѕ=D. (4)
При этом условии центр массы S ротора будет лежать на оси вращения и поэтому ротор не будет поворачиваться во время его статической балансировки на линейках или на роликах, даже при наличии очень больших дисбалансов D1и D2. Таким образом, неуравновешенный ротор будет казаться уравновешенным. В действительности при вращении ротора с частотой w на него будет действовать пара сил:
P=Dw2 (5)
с плечом, равным l (рис.2),которая вызовет постоянные по величине, но переменные по направлению давления на подшипники ротора, равные:
QA= -QB = P l / L (6)
Эти давления и будут служить причиной ненормальной работы подшипников.
Допустим теперь, что неуравновешенный ротор имеет только один дисбаланс D1 в плоскости диска турбины, вызванный, например, его эксцентричной посадкой на вал. По этой причине при вращении ротора с частотой w в плоскости, проходящей через центр массы диска, должна возникнуть сила:
P1 =D1 w2, (7)
которая вызовет динамические давления на подшипники А и В, равные соответственно (рис.2)
QA= P1 a + L / L = P1 85 + 340 / 340 » 1,25P1 ; (8)
QB = -P1 a / L = - P1 85 / 340 » - 0,25P1 .
Если предположить, что статическая балансировка ротора будет выполнена абсолютно точно путем прикрепления корректирующей массы в плоскости балансировочного кольца, то тогда динамическое давления на подшипники ротора:
Q`A= - Q`B = P1 l / L » P1 340 / 340 = P1 . (9)
Таким образом, после статической балансировки ротора динамическое давление на подшипник В увеличилось в 4 раза. Такой результат мы получили при условии l = L ; если же будет l > L и l < L, то динамическое давление на подшипник В может быть после статической балансировки ротора как больше, так и меньше силы Р1. Отсюда следует, что за результат статической балансировки нельзя поручиться заранее и сказать, насколько она ухудшит или улучшит несбалансированность ротора.
Рассмотрим еще один пример. Представим себе, что в предыдущем примере дисбаланс расположен в одной плоскости с центром массы ротора, и допустим, что балансировщик совершенно безукоризненно выполнил статическую балансировку путем прикрепления корректирующей массы в плоскости неуравновешенного груза. В этом случае неуравновешенная пара сил при вращении ротора не возникает, но тем не менее в плоскости, проходящей через центр массы, все же останется дисбаланс, обусловленный трением качения:
Dост.= m r, (10)
где m - масса ротора;
r - коэффициент трения качения.
Величина остаточного дисбаланса Dост. может получиться настолько значительной, что в некоторых случаях она оказывается больше величины допустимого дисбаланса. Так, например, в данном случае остаточный дисбаланс после статической балансировки на линейках может быть
Dост.= 21,3 Ч 0,005 Ч 1000 =106,5 гсм
(коэффициент r для стального вала и стальной опоры принимаем равным 0,005 см, а массу ротора 21,3 кг)
в плоскости, проходящей через центр массы ротора. Соответственно остаточные дисбалансы в плоскостях колеса вентилятора и балансировочного кольца, которые выбираются обычно для размещения корректирующих масс, будут соответственно равны :
DB = DостЧ c / b+c = 106,5 Ч136 / 275 = 53 гсм ; (11)
DК= DостЧ b / b+c = 106,5 Ч139 / 275 = 53,5 гсм .
Между тем допустимые дисбалансы в плоскостях коррекции, как показывают расчеты, составляют для этого ротора:
Dв.доп = 33 гсм ;
Dк.доп = 19 гсм.
Из приведенных примеров следует, что статическая балансировка не только не в состоянии обеспечить уравновешивание рассмотренного выше ротора турбогенератора с необходимой точностью, но не может ухудшить его сбалансированность. Сделанный вывод можно отнести ко всем роторам быстроходных машин, уравновешивание которых должно выполняться с заранее заданной точностью.
В настоящее время для уменьшения величины Dост применяют балансировочные станки, позволяющие создавать воздушную подушку между цапфами ротора и опорами станка (рис.3.1).
рисунок 3.1.
где: 1 - опора балансировочного станка;
2,4- каналы для подачи воздуха под давлением;
3 - цапфа ротора.
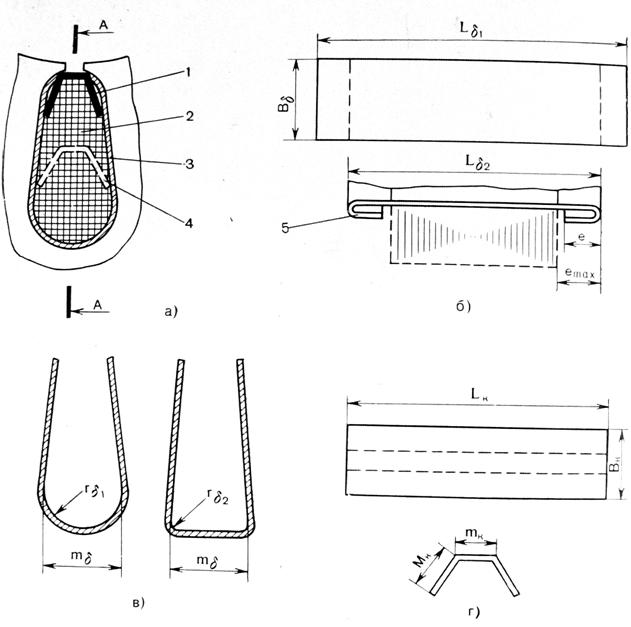
Если ротор балансируется на подшипниках качения, то для уменьшения остаточного дисбаланса наружными кольцами подшипников задают вынужденные колебания в осевом направлении с частотой в несколько раз большей частоты вращения ротора и с амплитудой, определяемой осевым зазором (рис.4).
Наиболее современными балансировочными станками для статического уравновешивания роторов являются станки, позволяющие вести этот процесс в динамическом режиме, во время вращения ротора с постоянной или переменной частотой, и измерять после устранения влияния моментной неуравновешенности главный вектор дисбалансов ротора в плоскости, проходящей через центр его массы.
На таких станках роторы могут балансироваться статически не только с заранее заданной точностью, но и осуществлять компенсацию дисбалансов в автоматическом или полуавтоматическом режиме.
Однако не следует забывать, что основной недостаток статической балансировки, заключающийся в невозможности обнаружить моментную неуравновешенность роторов, устранить нельзя. Поэтому область применения в технике статической балансировки роторов весьма ограничена.
В настоящее время статическая балансировка используется для уравновешивания роторов дискообразной формы, некоторых узлов гироскопических приборов и других, а также в том случае, когда единственной целью уравновешивания является приведения центра массы детали на ось вращения.
Похожие работы
... вызовет динамические давления на подшипники А и В, равные соответственно (рис.2) QA= P1 a + L / L = P1 85 + 340 / 340 » 1,25P1 ; (8) QB = - P1 a / L = - P1 85 / 340 » - 0,25P1 . Если предположить, что статическая балансировка ротора будет выполнена абсолютно точно путем прикрепления корректирующей массы в плоскости балансировочного кольца, то тогда динамическое давления на подшипники ротора ...
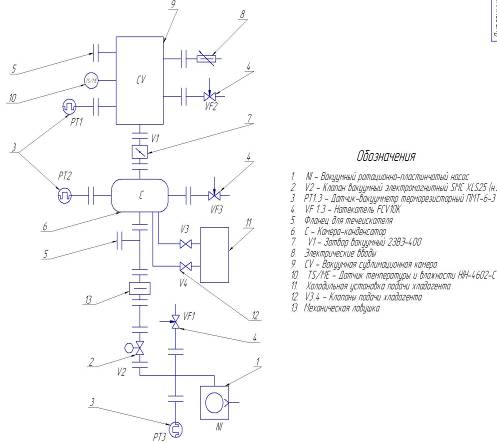
... с точки зрения БЖД В данном дипломном проекте разрабатывается установка, используемая в фермерском хозяйстве для изготовления сублимированного пищевого продукта. При работе установки могут возникать различные опасные и вредные производственные факторы. Установка состоит из проектируемого вакуумного механического ротационно-пластинчатого насоса; вакуумной сублимационной камеры объемом 1м3; ...
... Рабочие колеса не должны иметь износа лопаток и дисков от коррозии и эрозии более 25% от их номинальной толщины. Изгиб лопаток не допускается. 4.2.2 Ведомость дефектов на ремонт центробежного насоса Таблица 4.3 - Ведомость дефектов на ремонт насоса Наименование узлов и деталей подлежащих ремонту Характер неисправности Метод устранения Необходимые материалы Наименование Кол-во Ед. ...
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
0 комментариев