Навигация
2.4 Призмы.
Для минимального контакта между опорами в балансировочном станке целесообразно использовать призмы.
Различают опорные, грузоприемные и концевые соединительные призмы.
Призмы при помощи которых рычаги опираются на подушки или серьги, называют опорными. [3]
Призмы, воспринимающие нагрузку от платформы или других рычагов, называют грузоприемными.
Наконец, призмы передающие нагрузку, на другой рычаг или на коромысло, носят название концевых, или соединительных.
Призма, несущая в себе гиродержатель, по существу также является грузоприемной, но ее чаще называют концевой призмой коромысла или призмой гиредержателя.
Призмы изготовляют из высокоуглеродистой стали с содержанием углерода ни ниже 0,75 - 0,85 % (марка У - 8); для весов высокой точности применяется агат и ему подобные материалы.
Стальные призмы бывают самых различных профилей, но наиболее распространены четыре профиля: квадратный (рис. 4);
пятиугольный (рис.5);
треугольный (рис. 6);
и грушевидный с углом при вершине 600 (рис.7) .
Призмы заделываются в рычаги либо по всему периметру - закрытые призмы, либо только на одну треть высоты - открытые призмы.
Закрыты призмы по способу крепления делятся [3] на:
консольные - заделанные с одного конца и нагруженные равномерной нагрузкой по всей длине;
двухконсольные - заделанные в середине длины и нагруженные равномерной нагрузкой с обоих концов или сосредоточенной нагрузкой по концам;
двухопорные - заделанные в середине и нагруженные сосредоточенной нагрузкой;
заделанные по концам и нагруженные равномерной нагрузкой по всей средней части;
заделанные вблизи концов и нагруженные двумя сосредоточенными силами.
Закрытые призмы следует рассчитывать на: срезывание, изгиб и контактные напряжения в рабочем ребре призмы.
При расчете на срезывание, напряжение sS определяется по формуле: для консольной призмы
sS = Q / F ; (12)
для всех остальных призм
sS = Q / 2F , (13)
где Q - расчетная нагрузка;
F - площадь сечения призм.
Расчет открытых призм на срезывание и изгиб не ведется, так как эти призмы испытывают только деформацию смятия подошвы и рабочего ребра, в котором возникают контактные напряжения.
Расчет как открытых, так и закрытых призм на контактные напряжения в рабочем ребре ведется на 1 пог. см лезвия (табл.2)
таблица 2
Контактные напряжения в вершинах.
| Тип весов | Наименование призм | Конт. напряжения в кг на 1 пог. см |
| Неравноплечие | Призмы коромысла | 100 |
| передвижные | Призмы рычагов | 400 |
| Автомобильные весы | Призмы коромысла | 100 |
| Призмы рычагов | 900 |
В весах высокой точности призмы закрепляются установочными винтами непосредственно в гнездах (рис.8), или в специальных регулируемых каретках (рис.9).
На рис.9 изображен узел крепления призмы конструкции “Эталон”. Регулируемая каретка 1 крепится на плече коромысла 2 при помощи двух штифтов 3 и винта 4. На верхней части каретки 1 в цилиндрической впадине находится седло 5 с хвостовиком, в который упираются установочные винты 6 и 7.
Винтами 6 устанавливается требуемое положение призмы в горизонтальной плоскости, а при помощи винтов 7 регулируется длина плеча.
Для установки параллельности призм служит планка 8, которая поворачивается вокруг втулки 9 и закрепляется в требуемом положении винтом 10. Эта установка производится при помощи винтов 11, проходящими через выступы 12 планки 8.
В конструкции “Госметр” узла крепления призм (рис. 10) конец плеча коромысла выполняется с выемкой, на которой устанавливается каретка 1; радиус этой выемки меньше радиуса выпуклости в каретке, вследствие чего каретка опирается на коромысло в четырех точках: двух спереди и двух сзади.
В нижнюю часть каретки ввинчен 2 с проточкой в средней части. В эту проточку упираются своими концами два установочные винта 3, ввинченные в выступы 4 коромысла.
При этом способе крепления обеспечивается надежное соединение каретки с коромыслом и требуемое положение призм в горизонтальной плоскости.
Призма 5 укреплена в каретке четырьмя винтами 6. Эти винты соприкасаются с призмой конической частью своих головок.
Винты 6 служат для установления параллельности призм. Крепление призм при помощи клинового зажима, применяется в весах для больших нагрузок.
Для обеспечения хорошей работы весов необходимо, чтобы призма была твердой и в то же время не была хрупкой.
Это свойство может быть обеспечено только при хорошем качестве стали, из которой изготовляются призмы, и при правильной термической обработке.
Подушки и щечки.
Все призмы опираются, а также воспринимают или передают нагрузку через детали, называемые подушками.
Подушки либо заделываются в стойки или серьги на тугую посадку, либо вкладываются в эти детали (самоустанавливающиеся или качающиеся).
Подушки, которые заделываются на тугую посадку, обычно изготовляются из высокоуглеродистой стали специального профиля.
В настоящее время запрессованные подушки вытесняются самоустанавливающимися подушками почти во всех видах весов.
Это происходит потому, что практически трудно запрессовать подушку так, чтобы призма соприкасалась с ней по всей длине лезвия. Обычно призма соприкасается с подушкой либо с одного, либо с другого конца, что ведет к увеличению контактных напряжений и к выкрашиванию призм.
При самоустанавливающихся подушках призма соприкасается с подушкой по всей длине лезвия и потому случаев выкрашивания бывает значительно меньше.
Самоустанавливающиеся подушки бывают двух типов: штампованные, предохраняемые от выпадения щечками, специальными прокладками и штифтами, проходящими через серьги, и фрезерованные, которые предохраняются от выпадения при помощи штифтов, проходящих через подушку.
Подушки для весов грузоподъемностью до 3 т включительно изготовляют из малоуглеродистой стали с последующей цементацией, а для весов больших нагрузок - из высокоуглеродистой стали.
В весах для небольшой нагрузки размеры подушек выбираются конструктивно, так как всегда обеспечивается большой запас прочности.
У весов с большой предельной нагрузкой следует проверить размеры подушек основных рычагов на скалывание по формуле:
sS = Р / bh emin доп, (18)
где eср. – деформация, воспринимаемая размещенным на упругом элементе тензорезистором и средняя его длине (базе);
emin доп, - минимальная деформация, достаточная для регистрации данным тензоизмерительным трактом с погрешностью не выше допустимой
Искомая деформация eср. для некоторых типовых упругих элементов – балок и мембран – может быть определена на основе зависимостей, проводимых в соответствующих курсах или справочниках.
Отсутствие частотных погрешностей определяется решением дифференциального уравнения вынужденных колебаний упругих элементов
Анализ уравнений движения, показывает, что коэффициент динамичности несущественно отличается от единицы (с ошибкой менее 1%) при выполнении следующего неравенства:
w0 > (8 ё 10) w (19)
где w0 – собственная частота упругой системы;
w -- частота исследуемого процесса (высшая учитываемая гармоническая составляющая).
Для упругих систем, отличающихся значительным затуханием (наличием трения, демпфирование, материал с большим внутренним трением), превышение собственной частоты над частотой исследуемого процесса может быть уменьшено до 3 – 4. В этом случае удается практически исключить инерционные погрешности и при собственной частоте упругого элемента расширить частотные пределы измерений.
Как отмечено было выше, широкое применение получили измерения разнообразных физических величин с помощью преобразователей, использующих тензорезисторы в качестве первичных (чувствительных) элементов. И если совсем недавно измерения с помощью тензорезисторов сопротивления считались достаточно грубыми, то с настоящее время электротензометрирование используется и при точных измерениях, вплоть до прецизионных. Так например, тензометрические преобразователи применяются при весо- и силоизмерениях.
При весоизмерениях используются как наклеиваемые тензорезисторы, так и тензорезисторы с проволокой на свободных подвесах.
В НИКИМП разработан ряд тензопреобразователей с нагрузками от 100 кгс до 1000 тс, использующих специальные типы наклеиваемых тензорезисторов, в Институте автоматики – силоизмерительные тензопреобразователи с номинальными усилиями от 1 до 250 тс, использующие бесклеевые тензорезисторы. За рубежом сило- и весоизмерительные тензопреобразователи выпускаются фирмами “Hotinger”, “Philips”, “Simens” и др.
Серийный выпуск электротензометрических весов, сило- и весоизмерительных тензопреобразователей налажен на Киевском заводе порционных автоматов им. Ф.Э. Дзержинского (силоизмерительные бесклеевые тензопреобразователи типов ДСТБ-С, ДСТВ-С и др.) на Одесском заводе им. Старостина (тензометрические весы: крановые, бункерные и т.п., разработанные в ОПИ под руководством А.С. Радчика) и на Краснодарском заводе тензометрических приборов (силоизмерительные тензопреобразователи типа ТДС с чувствительным элементом в виде наклеенных полупроводниковых тензорезисторов)
Фирма “Simens” выпускает тензометрические силоизмерители высокой точности с упругими элементами в виде двух параллельных балок, используемые в торговых весах (предельные нагрузки от 13 до 600 кгс).
В статье [5] приводится описание силоизмерительного тензопреобразователя из монокристалла кремния, в котором используется интегральная микросхема. Также рассмотрен силоизмерительный преобразователь с чувствительным элементом из стеклоткани, на которую наклеены проволочные тензорезисторы. Эти преобразователи применяются для измерения малых нагрузок.
Современные сило- и весоизмерительные тензопреобразователи позволяют выполнять измерения с погрешностью, не превышающие 0,5%. Имеются сведения о тензопреобразователях, позволяющих выполнять и более точные измерения (с погрешностью 0,1 – 0,2%).
Для измерения давлений широко используются тензопреобразователи с проволочными, фольговыми и полупроводниковыми тензорезисторами, причем благодаря высокому верхнему частотному пределу полупроводниковые тензорезисторы в последнее время стали все чаще применяться в преобразователях для измерения давлений (в первую очередь динамических давлений).
Для измерения давлений используются в основном два вида упругих преобразователей: мембраны и цилиндрические оболочки . Некоторое применение для измерения статических давлений находят преобразователи, построенные на базе обычного манометра с трубкой Бурдона.
Мембранные преобразователи давлений в качестве упругого элемента имеют мембрану – тонкую пластинку, нагруженную с одной стороны измеряемым давлением р . Упругая пластинка закрепляется по контуру, и на поверхности, противоположной той, на которую действует давление, располагается тензочувствительный элемент. Обычно применяются круглые пластинки, причем их жесткость и геометрические размеры выбираются такими, что влиянием цепных напряжений можно пренебречь.
Если из-за больших нагрузок или недостаточной жесткости мембрана получает большие прогибы, то на изгибные напряжения накладывают цепные напряжения и линейность зависимости между давлением р и относительной деформацией eД на поверхности нарушается.
Большое влияние на качество работы мембранного преобразователя давлений, линейность его функции преобразования и чувствительность оказывает степень заделки мембраны по контуру. Обычно следует стремиться к жесткой заделке, ибо при этом создаются оптимальные условия расположения на мембране тензочувствительного элемента и обеспечивается более высокая собственная частота самой мембраны.
Тензочувствительные элементы могут быть выполнены в виде проволочных, фольговых или полупроводниковых тензорезисторов.
Расчет чувствительности мембранного преобразователя давления производится в следующем порядке:
а) определяются изгибающие моменты в тангенциальном и радиальных сечениях;
б) находятся деформации по направлению радиуса по нормали к радиусу;
в) определяются средние интегральные деформации тензочувствительных элементов при действии расчетного давления.
Для жестко заделанной по контуру мембраны изгибающие моменты в радиальном и тангенциальном сечениях будут:
Мr = p/16 [R2 (1+m) - r2 (3+m)]; ь (20)
Mt = p/16 [R2 (1+m) - r2 (3+3m)]; ю
где р – распределенное давление на мембрану;
m --коэффициент Пуассона для материала мембраны;
R – радиус мембраны;
r – радиус точки мембраны, для которой вычисляются Мr и Mt.
Соответствующие напряжения sr и st и деформации er и et на поверхности мембраны в точке с радиусом r находятся из зависимостей:
sr = 6Mr / t2 = 3p / 8t2 [R2 (1+m) - r2 (3+m)]; ь (21)
sr = 6Mr / t2 = 3p / 8t2 [R2 (1+m) - r2 (3+3m)]; ю
er = 1 / E (sr - mst); (22)
et = 1 / E (sn - mst), (23)
где Е – модуль нормальной упругости для материала мембраны;
t – толщина мембраны.
Подставляя в последние уравнения значения sr и st, окончательно можно записать:
er = (3p / 8t2) (1 - m2 / E) (R2 - 3r2); ь (24)
et = (3p / 8t2) (1 - m2 / E) (R2 - r2). ю
Для мембраны, свободно опертой по контуру, деформации в точке с радиусом r можно найти по формулам:
er = (3p / 8Et2) [R2 (3 - 2m2) - r2 (3 - 3m2)] ь (25)
et = (3p / 8Et2) [R2 (3 - 2m2) - r2 (1 - m2)] ю
Дальнейшее решение сводится к определению абсолютной Dlд и относительной (средней) eср = Dlд / lд деформации участка мембраны на длине тензочувствительного элемента lд . Исходными данными для этого решения являются приведенные выше зависимости для er и et и геометрическая форма решетки.
Для центрального профиля:
Dlд = 2 r0т0 er dr = (3p / 4Et2 ) [r0 (1- m2) (r02 - R2) / Е ] ь (26)
eср = (Dlд / lд )= (3p / 8Et2 ) [ (1- m2) / Е (R2- r02)] ю
Собственная частота в герцах (основной тон) жестко заделанной мембраны определяется по зависимости, полученной Ю.А. Шиманским:
f0 = 1,57 Ц Eh3 / 12R4 m0 (1 - h2) (27)
где через m0 обозначена масса единицы площади мембраны.
Собственная частота мембраны, свободно опертой по кромкам,
f0 = 0,94 Ц Eh3 / 12R4 m0 (1 - h2) (28)
В некоторых случаях и кинематическую схему преобразователя давления вводится еще один упругий элемент, например вторая мембрана или консольная балка (рис.13), на котором располагается тензочувствительный элемент.
а) б)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.13 Применение второго упругого элемента
а- дополнительной мембраны
б- консольной балки
Подобное конструктивное решение является рациональным при быстропеременных нагревах мембраны, когда не удается обеспечить хорошую термокомпенсацию при расположении рабочего и компенсационного тензорезисторов на самой мембране.
Для определения чувствительности такого преобразователя находится сила F , передаваемая от наружной мембраны к внутреннему упругому элементу. Эта сила может быть найдена из условия равенства прогибов мембраны и дополнительного упругого элемента.
Если в качестве дополнительного упругого элемента используется также мембрана, то выражение для деформаций в радиальном и тангенциальном сечениях этой мембраны в точке с радиусом r имеют вид:
er = (3F / 2pt2 ) [(1-m2) (ln R/r - 1) / E ] ь (29)
er = (3F / 2pt2 ) [(1-m2) (ln R/r) / E ] ю
Если в качестве дополнительного упругого элемента используется призматическая консольная балка, то средняя деформация тензоэлемента, расположенного вдоль балки будет :
eср. = 6F (l - xД ) / E bh2 (30)
где l, d, h – длина, ширина и толщина балки;
хД – расстояние от середины тензоэлемента до заделки, обычно равное половины базы тензорезистора.
Приведенные выше зависимости для чувствительности и собственные частоты упругих элементов иллюстрируют общее очень важное в практическом применении правило : наибольшей чувствительности преобразователя независимо от его типа при сохранении достаточно высокой собственной частоты можно достигнуть выбором материала с низким модулем упругости. Для любых упругих элементов при заданных нагрузках деформация на поверхности в месте установки тензорезистора обратно пропорциональна модулю нормальной упругости. Что касается собственной частоты, то при неизменных геометрических размерах упругого элемента она падает, но пропорционально отношению модулей упругости в степени 1 / 2 . Это уменьшение частоты легко компенсируется изменением геометрических размеров упругого элемента (например, увеличением толщины). В целом при заданной собственной частоте преобразователя его чувствительность при использовании материалов с низким модулем упругости возрастает.
В качестве основного чувствительного элемента возможно использование серийных тензопреобразователей. Преобразователь состоит из измерительного блока и электронного устройства. Преобразователи различных параметров имеют унифицированное электронное устройство и отличаются лишь конструкцией измерительного блока.
Измеряемый параметр подается в камеру измерительного блока и линейно преобразуется в деформацию чувствительного элемента и изменение электрического сопротивления тензорезисторов тензопреобразователя, размещенного в измерительном блоке.
Электронное устройство преобразователя преобразует это изменение сопротивления в токовый выходной сигнал.
Чувствительным элементом тензопреобразователя является пластина из монокристаллического сапфира с кремниевыми пленочными тензорезисторами (структура КНС), прочно соединенная с металлической мембраной тензопреобразователя.
Схема преобразователя Сапфир 22ДА представлена на рис.14.
Тензопреобразователь 4 мембранно-рычажного типа размещен внутри основания 9 и отделен от измеряемой среды металлической гофрированной мембраной 8.
Мембраны 8 и 14 по наружному контуру приварены к основанию 9 и соединены между собой центральным штоком 6, который связан с концом рычага тензопреобразователя 5 с помощью тяги 13. Измеряемое давление подается в камеру 7; полость 12 вакуумирована и герметизирована.
Фланец 10 уплотнен с помощью прокладки 3.
Воздействие измеряемого давления вызывает прогиб мембраны 8, изгиб мембраны тензопреобразователя 4 и изменение сопротивления тензорезисторов. Электрический сигнал от тензопреобразователя передается из измерительного блока в электронное устройство 1 по проводам через гермовывод 2.
3.ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ.
Похожие работы
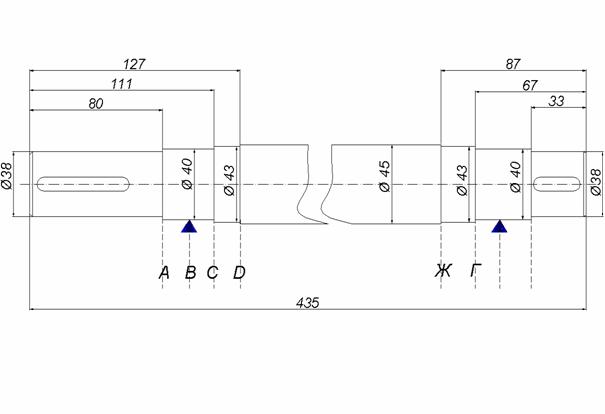
... вызовет динамические давления на подшипники А и В, равные соответственно (рис.2) QA= P1 a + L / L = P1 85 + 340 / 340 » 1,25P1 ; (8) QB = - P1 a / L = - P1 85 / 340 » - 0,25P1 . Если предположить, что статическая балансировка ротора будет выполнена абсолютно точно путем прикрепления корректирующей массы в плоскости балансировочного кольца, то тогда динамическое давления на подшипники ротора ...
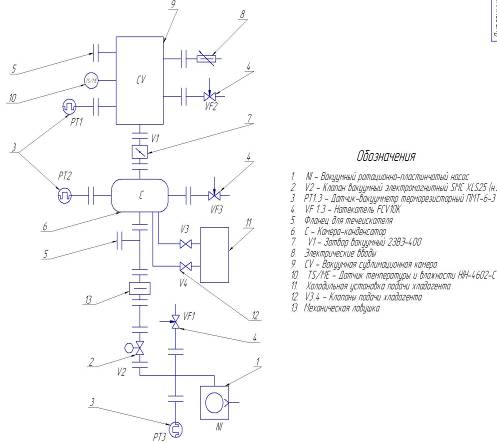
... с точки зрения БЖД В данном дипломном проекте разрабатывается установка, используемая в фермерском хозяйстве для изготовления сублимированного пищевого продукта. При работе установки могут возникать различные опасные и вредные производственные факторы. Установка состоит из проектируемого вакуумного механического ротационно-пластинчатого насоса; вакуумной сублимационной камеры объемом 1м3; ...
... Рабочие колеса не должны иметь износа лопаток и дисков от коррозии и эрозии более 25% от их номинальной толщины. Изгиб лопаток не допускается. 4.2.2 Ведомость дефектов на ремонт центробежного насоса Таблица 4.3 - Ведомость дефектов на ремонт насоса Наименование узлов и деталей подлежащих ремонту Характер неисправности Метод устранения Необходимые материалы Наименование Кол-во Ед. ...
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
0 комментариев