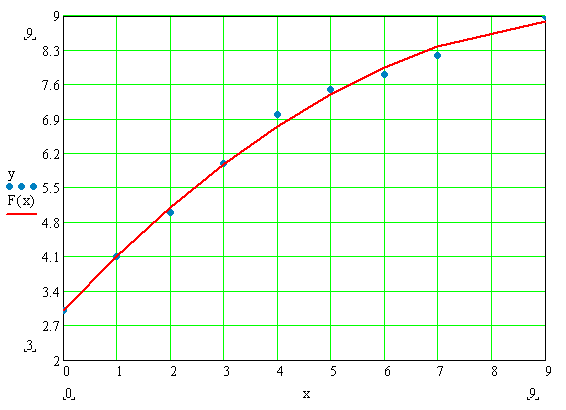
Построение статической характеристики объекта
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Автоматическая система регулирования с П-регулятором
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
Министерство Российской Федерации по атомной энергии
Северский государственный технологический институт
Кафедра ЭАФУ
АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ
Курсовой проект
200600.В079.000ПЗ
Преподаватель
В.Я.Дурновцев
___________2003 г.
Студент
И.И.Иванов
___________2003 г.
Северск - 2003
Содержание
Введение
1. Построение статической характеристики объекта
1.1 Постановка задачи
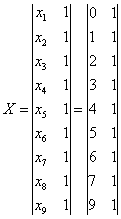
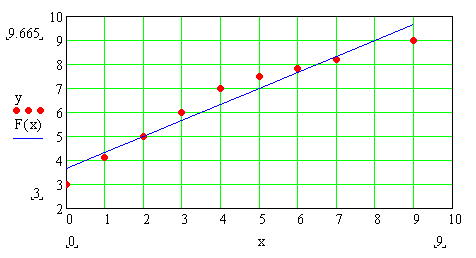
1.2 Аппроксимация полиномом первого порядка
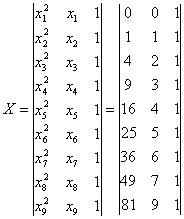
1.3 Аппроксимация полиномом второго порядка
1.4 Расчет коэффициентов передачи
2. Динамическая характеристика
2.1 Постановка задачи
2.2 Динамическая модель объекта первого порядка без запаздывания
2.3 Динамическая модель первого порядка с запаздыванием
3. Построение математической модели объекта
4. Аналитическое решение
5. Частотные характеристики
5.1 Частотные характеристики объекта
5.2 Расширенные частотные характеристики объекта
6. Выбор и расчет параметров настройки регулятора
6.1 Расчет П-регулятора
6.2 Расчет И-регулятора
6.3 Расчет ПИ-регулятора
7. Передаточные функции системы
7.1 Разомкнутые системы
7.1 Замкнутые системы
8. Исследование устойчивости АСР
8.1 Обзор методов исследования на устойчивость
8.2 Проверка устойчивости по методу Рауса
8.3 Проверка устойчивости по корням характеристического уравнения
9. Приведение к системе дифференциальных уравнений
9.1 Система с П-регулятором
9.2 Система с И-регулятором
9.3 Система с ПИ-регулятором
10. Построение переходных процессов
11. Оценка качества функционирования АСР
12. Выводы
ЗАДАНИЕ
на выполнение работы по курсу
"Теоретические основы специальности"
студент гр. В-079 Рахимов Ч.Ш.
1. ИСХОДНЫЕ ДАННЫЕ
1.1 Статическая характеристика объекта регулирования
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ti | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| yi | 0 | 0,1 | 1,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,2 | 3,5 |
1.2 Динамическая характеристика объекта регулирования
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ti | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| yi | 0 | 0 | 0,5 | 0,71 | 0,8 | 0,91 | 0,98 | 0,99 | 0,995 | 1 |
1.3 Требования к качеству системы регулирования:
- степень колебательности m=0,221;
- статическая ошибка, не более, Yст.доп.= ;
- время регулирования (при 10 %-ной ошибке), tр.доп.= ;
- использовать П, И, ПИ - регуляторы.
2. РАСЧЕТНО - ПОЯСНИТЕЛЬНАЯ ЗАПИСКА (РАЗДЕЛЫ):
Введение
1. Постановка задачи
2. Построение статической характеристики объекта
3. Построение динамической характеристики объекта
4. Математические модели объекта
5. Частотные характеристики объекта
6. Выбор и расчет параметров настройки регуляторов
7. Разомкнутые и замкнутые системы
8. Исследование систем на устойчивость
9. Построение переходных процессов в замкнутой системе
10. Оценка качества системы
11. Выводы
Литература
3. ОБЯЗАТЕЛЬНЫЕ РАСЧЕТЫ (БЕЗМАШИННЫЕ):
- построение статической модели объекта в виде полиномов 1-го и 2-го порядков;
- расчет коэффициента передачи объекта при 10, 50, 90 % номинального режима;
- построение динамической модели объекта в виде передаточной функции 1-го порядка с запаздыванием и без запаздывания;
- формирование математических моделей объекта;
- расчет частотных характеристик объекта;
- выбор и расчет регуляторов;
- формирование передаточных функций разомкнутой и замкнутых систем;
- исследование устойчивости замкнутых систем;
- приведение к системе дифференциальных уравнений;
- оценка качества систем.
4. ПРОВЕРОЧНЫЕ, ОКОНЧАТЕЛЬНЫЕ, ПОЛНЫЕ РАСЧЕТЫ
выполнить на ПЭВМ в электронной книге или в любой из пригодных систем.
ЛИТЕРАТУРА
1. Наладка автоматических систем и устройств управления технологическими процессами: Справочное пособие/ Под ред. А. С. Клюева. -М.: Энергия, 1977. - 400 с.
2. Полоцкий Л. М., Лапшенков Г. И. Автоматизация химических производств. Теория, расчет и проектирование систем автоматизации. - М.: Химия, 1982. - 296 с.
3. Дурновцев В. Я. Расчет АСР /Электронная книга. Северск, СТИ ТПУ, 1997. - 188 с.
4. Дурновцев В.Я., Ширяев А. А. Расчет автоматических систем регулирования. 1. Расчет линейных АСР. - Указания по выполнению индивидуальных заданий и курсовых проектов. -Томск: ТПИ, 1989. - 92 с.
5. Дурновцев В.Я., Ширяев А. А. Линейные автоматические системы регулирования. 1. Объекты АСР. - Методические указания. - Томск: ТПИ, 1989. - 209 с.
6. Дурновцев В.Я., Ширяев А. А. Использование электронных таблиц в инженерных расчетах./ Пособие. - Северск: СТИ ТПУ, 1997. - 47 с.
Дата выдачи задания: 20 февраля 2002 г.
Введение
Всякий технологический процесс характеризуется определенными физическими величинами. Для обеспечения требуемого режима работы эти величины необходимо поддерживать постоянными или изменять по тому или иному закону. Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса. Параметрами технологического процесса могут быть давление, температура, уровень жидкости, концентрация вещества, расход вещества или энергии, скорость изменения какой – либо величины и т. п. Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной.
В системе ручного регулирования выходное воздействие не оказывает без вмешательства оператора никакого влияния на входное воздействие. Состояние входа системы приводится в соответствие с состоянием ее выхода действиями оператора. Таким образом, лишь благодаря работе оператора система регулирования замыкается. Следовательно, для того чтобы полностью автоматизировать процесс регулирования, необходимо систему сделать замкнутой без вмешательства оператора.
Автоматическим управление называется процесс, при котором операции выполняются посредством системы, функционирующей без вмешательства человека в соответствии с заданным алгоритмом. Автоматическая система с замкнутой цепью воздействия, в которой управляющее воздействие вырабатывается в результате сравнения истинного значения управляемой величины с заданным ее значением, называется АСР. Процесс, посредством которого одну или несколько регулируемых величин приводят в соответствие с их постоянными изменяющимися по определенному закону заданными значениями и при этом указанное соответствие достигается техническими средствами путем выработки воздействия на регулируемые величины. Процесс автоматического регулирования реализуется АСР. Автоматическая система структурно может быть представлена по–разному. В общем случае под структурой АСР понимается совокупность частей автоматической системы, на которые она может быть разделена по определенным признакам, и путей передачи взаимодействий между ними, образующих автоматическую систему. Простейшая составная часть структурной схемы АСР, отображающая путь и направление передачи воздействия между частями автоматической системы, на которые эта система разделена в соответствии со структурной схемой, называется связью структурной схемы. Связь структурной схемы АСР, образуемая основной цепью воздействия между участками этой цепи, называется основной связью. Связь структурной схемы АСР, образующая путь передачи воздействий в дополнение к основной цепи воздействий или какому – либо участку, называется дополнительной связью. Дополнительная связь структурной схемы АСР, направленная от выхода к входу рассматриваемого участка цепи воздействий, называется дополнительной обратной связью (или просто обратной связью). Обратная связь, замыкающая системы, передает результат измерения выходной величины на вход системы. Эта выходная величина представляет собой физическую величину, подлежащую регулированию (х - регулируемая величина или управляемая величина). Входная величина g (t) и f (t) являются соответственно задающим и возмущающим воздействием. Задача системы состоит в том, чтобы возможно точнее воспроизводить на выходе х задаваемый закон изменения g (t) и возможно полнее подавлять влияние возмущающего воздействия f (t), а также других внешних и внутренних помех, если они имеются. Для этой цели измеренная выходная величина х сравнивается через измеритель у = к . х с входной величиной g (t). Получается рассогласование (ошибка).
Рассогласование служит источником воздействия на систему, причем система работает на уничтожение или сведения к допустимо малому значению величины этого рассогласования, то есть величины ошибки системы. Случаю g (t) = const соответствует собственно автоматическое регулирование на поддержание постоянного значения регулируемой величины. Это типичная система регулирования по заданной настройке регулятора.
Важно отметить, что в замкнутых системах автоматического управления и регулирования, как правило, не бывает спокойного состояния равновесия. Все время имеются какие-то внешние возмущающие воздействия, порождающие рассогласование, которое заставляет систему работать. Поэтому важнейшим элементом проектирования таких систем является исследование динамических процессов, описываемых обычно системой дифференцируемых уравнений, отражающих поведение всех звеньев системы. Особенностью, усложняющей расчет динамики системы, является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь.
Автоматические системы регулирования должны обеспечивать:
- устойчивость системы при любых режимных ситуациях объекта;
- минимальное время регулирования;
- минимальные динамические и статические отклонения регулируемой величины, не выходящие по уровню за допустимые эксплуатационные пределы.
Выполнение этих требований достигается в результате обоснованного использования одного из законов регулирования – математической зависимости между входной (отклонением регулируемой величины от предписанного значения) и выходной (регулирующим воздействием) величинами регулятора.
Похожие работы
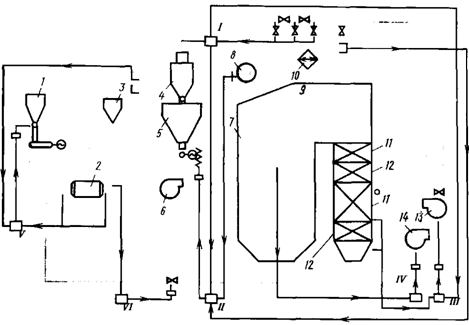
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...
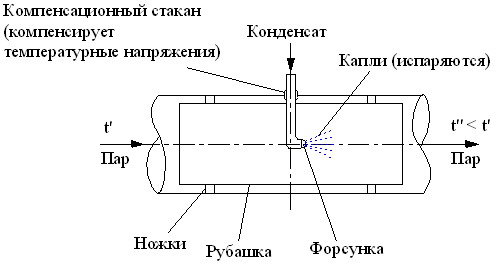
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
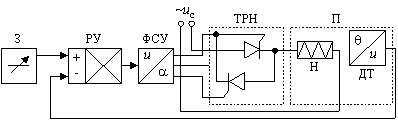
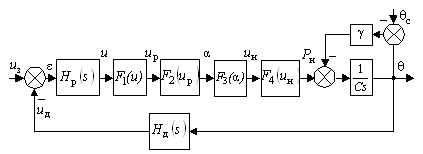
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев