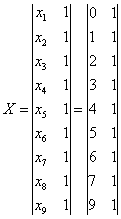
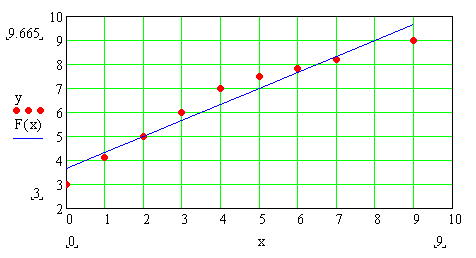
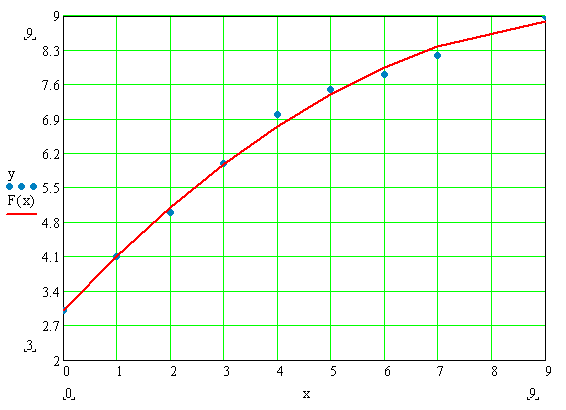
Построение статической характеристики объекта
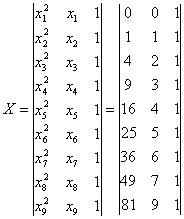
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
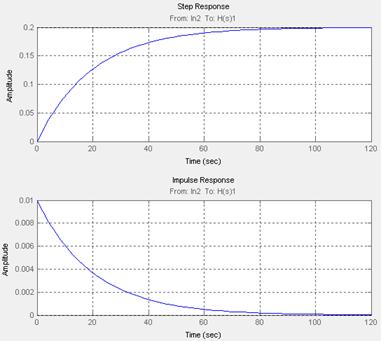
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
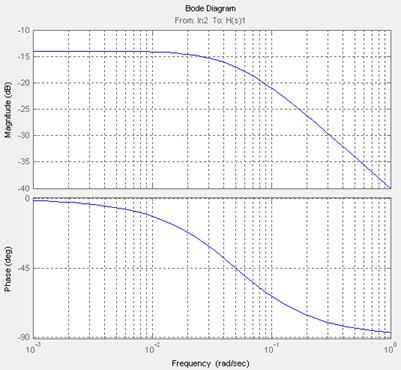
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Выбор и расчет параметров настройки регуляторов
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
6. Выбор и расчет параметров настройки регуляторов
Автоматические регуляторы по своим динамическим свойствам подразделяются на линейные и нелинейные. При проектировании наиболее часто применяемых линейных регуляторов используют:
- пропорциональный регулятор (П-регулятор);
- интегральный регулятор (И-регулятор);
- пропорционально-интегральный регулятор (ПИ-регулятор);
- дифференциальный регулятор (Д-регулятор);
- пропорционально-дифференциальный регулятор (ПД-регулятор);
- пропорционально-интегро-дифференциальный регулятор (ПИД-регулятор).
Требования, предъявляемые к регулятору, обусловлены требованиями ко всей системе регулирования: в обеспечении устойчивости замкнутой системы. При проектировании систем стремятся обеспечить их устойчивость с некоторой гарантией, так чтобы изменение параметров в некоторых пределах не могло привести к неустойчивости. Для этой цели используются понятия запасов устойчивости систем автоматического регулирования, вводимых на основе частотного критерия Найквиста:
![]()
где ![]() - передаточная функция объекта регулирования;
- передаточная функция объекта регулирования;
![]() - передаточная функция регулятора.
- передаточная функция регулятора.
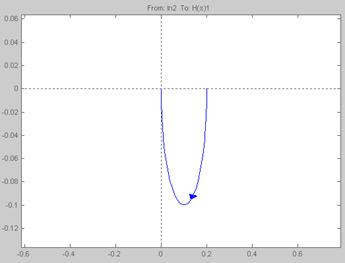
6.1 Расчет П-регулятора
Передаточная характеристика П-регулятора имеет вид:
![]()
![]()
| w | R0 | I0 | j0 | Q0 | KП | jП |
| 0 | 0.428 | 0 | 0 | 0.183 | -2.336 | 3.142 |
| 0.5 | 0.099 | -0.438 | -1.348 | 0.202 | -0.492 | 1.794 |
| 1 | -0.257 | -0.196 | -2.489 | 0.105 | 2.456 | 0.653 |
| 1.5 | -0.208 | 0.041 | -3.336 | 0.045 | 4.627 | -0.194 |
| 2 | -0.095 | 0.109 | -3.994 | 0.021 | 4.545 | -0.852 |
6.2 Расчет И-регулятора
Передаточная характеристика И-регулятора имеет вид:
![]()

| w | Rо | Iо | kи |
| 0 | 0.428 | 0 | 0 |
| 0.5 | 0.099 | -0.438 | 0.432 |
| 1 | -0.257 | -0.196 | 0.602 |
| 1.5 | -0.208 | 0.041 | -1.025 |
| 2 | -0.095 | 0.109 | -4.291 |
Похожие работы
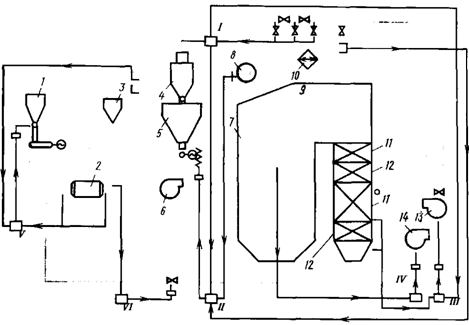
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
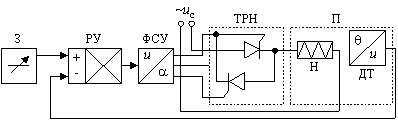
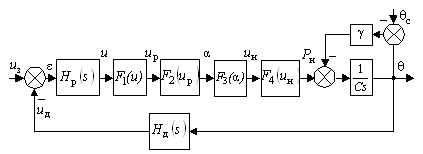
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев