Построение статической характеристики объекта
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
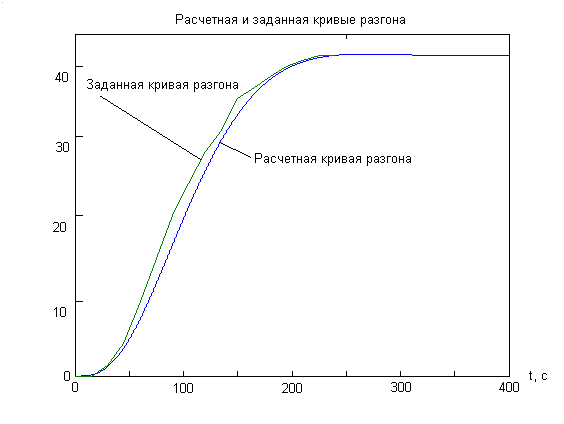
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Построение статической характеристики объекта
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
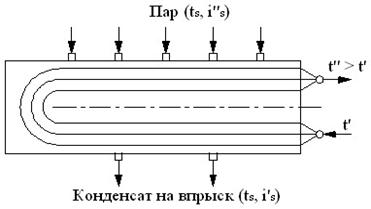
1. Построение статической характеристики объекта
1.1 Постановка задачи
Статические характеристики определяют зависимость между выходной и входной величинами звена или системы в установившемся состоянии.
Необходимо найти неизвестные параметры функции f(x) и некоторый минимизирующий критерий близости f(x) к экспериментальным данным y.
Таблица 1
Статическая характеристика объекта регулирования.
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| X | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Y | 0 | 0,1 | 0,5 | 1 | 1,5 | 2 | 2,5 | 3 | 3,2 | 3,5 |
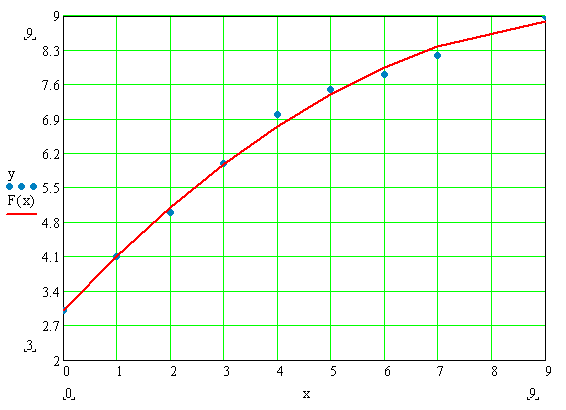
Для построения статической характеристики необходимо табличные данные аппроксимировать полиномами первого и второго порядков.
Затем необходимо рассчитать сумму квадратов отклонений для каждой статистической характеристики объекта, и выбрать такую характеристику, у которой сумма квадратов отклонений будет наименьшей. Затем для этой модели рассчитаем коэффициент передачи объекта.
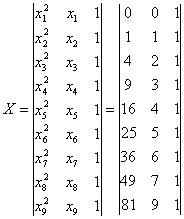
1.2 Аппроксимация полиномом первого порядкаМодель первого порядка описывается уравнением вида:![]()
y=a∙x+b

Для нахождения коэффициентов а и b составим систему линейных алгебраических уравнений, причем число уравнений в системе равно числу состояний объекта в эксперименте.
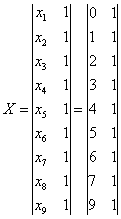
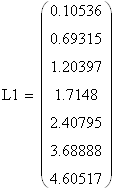
Для решения данной системы алгебраических уравнений воспользуемся матричным методом наименьших квадратов. Составим матрицы входных и выходных сигналов:
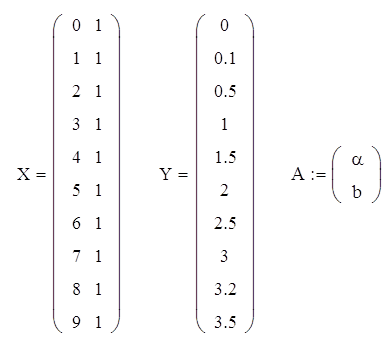
Получим систему с двумя неизвестными: X .A = Y
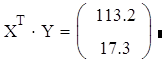
Транспонируем матрицу Х:

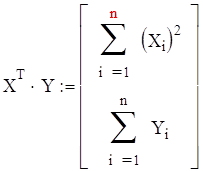
Умножив слева обе части исходной системы на транспонированную матрицу коэффициентов, получим систему, число уравнений в которой равно числу неизвестных, а решение этой системе будет доставлять минимум критерий оптимизации.
XT. X . A = XT. Y
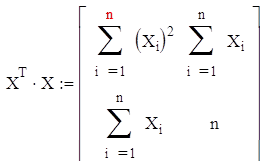
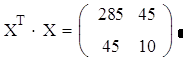
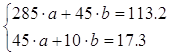
Получим систему двух линейных алгебраических уравнений первого порядка:
Найдем главный определитель матрицы:

Найдем вспомогательные определители системы:
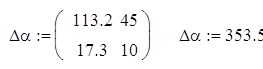
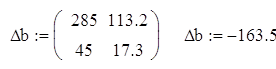
Найдем коэффициенты а и b:
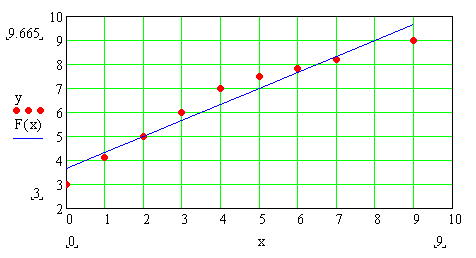
Таким образом, получим полином:
у =0.428 . х - 0.198
Для оценки полученного полинома вычислим значения функции и сравним их с экспериментальными данными.
Результаты вычисления сведем в таблицу. таблица 2
| i | x | y | yi | Δyi |
| 1 | 0 | 0 | -0.198 | 0.198 |
| 2 | 1 | 0.1 | 0.203 | -0.130 |
| 3 | 2 | 0.5 | 0.658 | -0.158 |
| 4 | 3 | 1 | 1.086 | -0.086 |
| 5 | 4 | 1.5 | 1.514 | -0.014 |
| 6 | 5 | 2 | 1.942 | 0.058 |
| 7 | 6 | 2.5 | 2.370 | 0.130 |
| 8 | 7 | 3 | 2.798 | 0.202 |
| 9 | 8 | 3.2 | 3.226 | -0.026 |
| 10 | 9 | 3.5 | 3.654 | -0.154 |
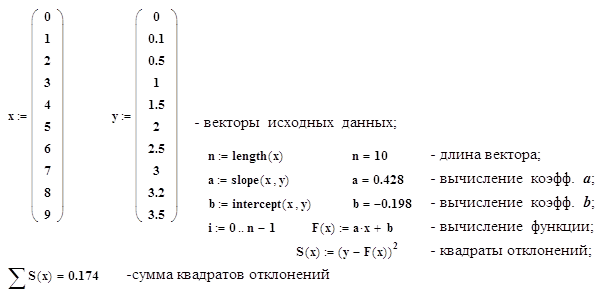
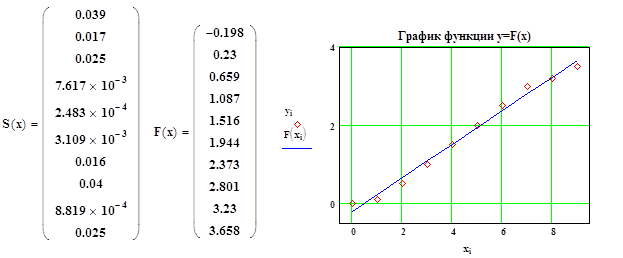
Сумма квадратов отклонений:
å Dуi 2 = 0.174
Ниже приведен проверочный расчет модели объекта первого порядка на ЭВМ в системе MathCad.
Похожие работы
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...
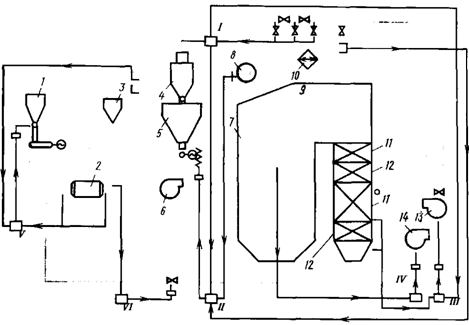
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
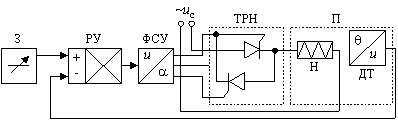
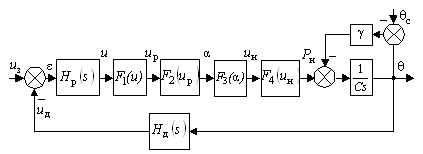
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев