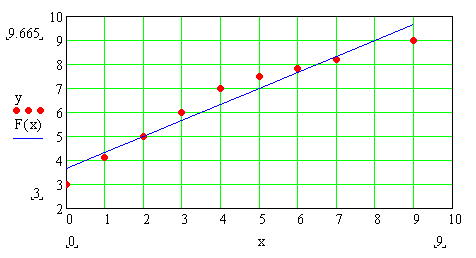
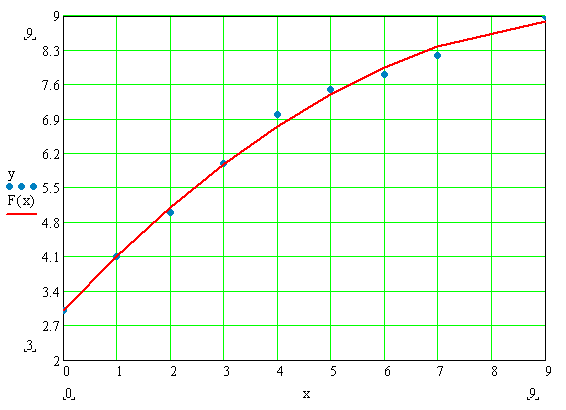
Построение статической характеристики объекта
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Расчет коэффициентов передачи
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
1.4 Расчет коэффициентов передачи
Для статической модели первого порядка коэффициент передачи определяется как производная от выходной величины:
Коэффициент передачи объекта показывает в какую сторону и в какой степени происходит изменение сигнала при прохождении его через объект, то есть усилительные свойства объекта.
Для статической модели первого порядка коэффициент передачи определяется как производная от выходной величины:
![]()
![]()
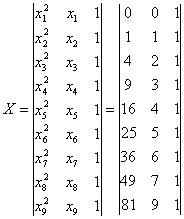
Для статической модели второго порядка коэффициент передачи определяется как производная от выходной величины:
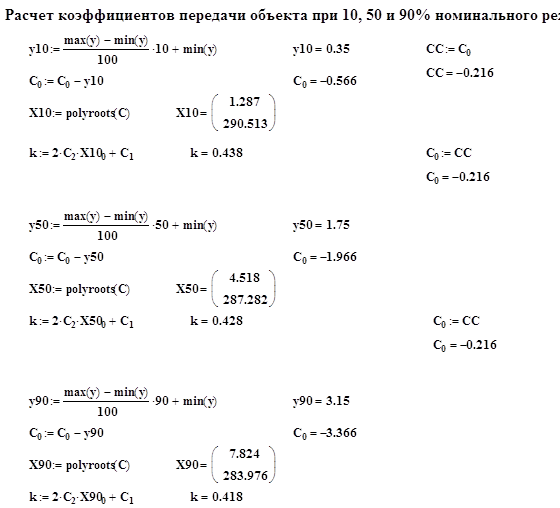
Расчет коэффициентов передачи производим при 10, 50 и 90%

Рассчитаем значение коэффициента передачи при 10 % по формуле:
где ![]() - максимальное установившееся значение сигнала.
- максимальное установившееся значение сигнала.
![]() - минимальное значение сигнала.
- минимальное значение сигнала.
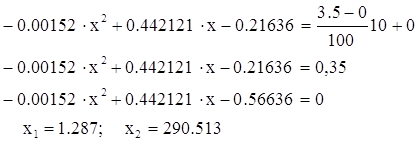
Подставляя полученные данные, получим:
![]()
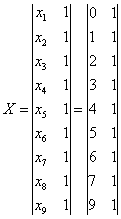
Выбираем х1, т.к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 10 % номинального режима:
Рассчитаем значение коэффициента передачи при 50 % по формуле:

Подставляя полученные данные, получим:
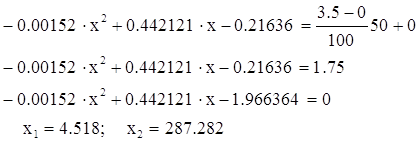
Выбираем х1, т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 50 % номинального режима:
![]()

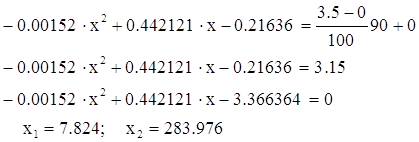
Рассчитаем значение коэффициента передачи при 90 % по формуле:
![]()
Выбираем х1, т. к только он входит в диапазон экспериментальных значений. Подставим значение х1 в (1.2) и получим значение коэффициента передачи при 90 % номинального режима:
Результаты расчета сведены в таблицу.
Таблица 4
Коэффициенты передачи.
| 10% | 50% | 90% | |
| х | 1.287 | 4.518 | 7.824 |
| к | 0.438 | 0.428 | 0.418 |
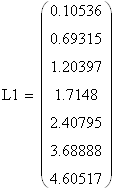
Ниже приведен проверочный расчет коэффициентов передачи объекта на ЭВМ в системе MathCad.
2. Динамическая модель объекта
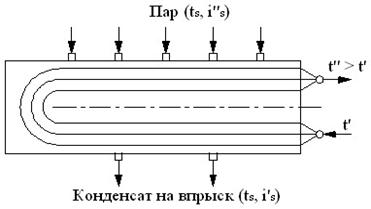
2.1 Постановка задачи
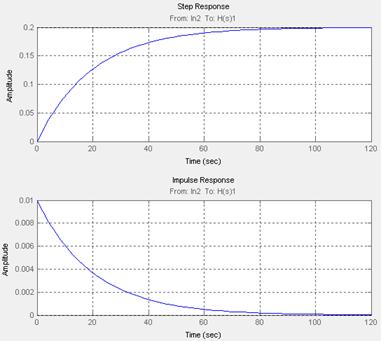
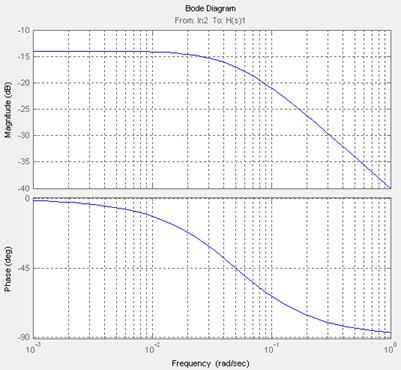
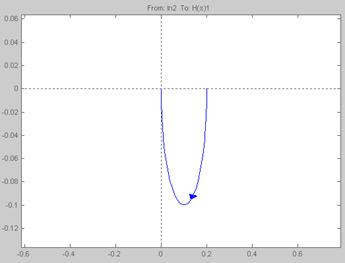
Динамическая модель связывает изменение входных и выходных величин во времени, то есть отражает протекание переходного процесса.
Для получения динамической характеристики объекта регулирования необходимо выполнить следующие действия:
- задаться рядом значений времени t;
- подав на вход объекта возмущение, для каждого ti зарегистрировать значение выходного сигнала yi.
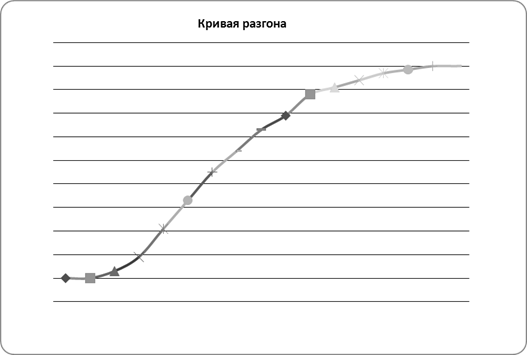
Полученная, таким образом, динамическая характеристика заданного объекта регулирования, приведена в табл. 5.
Таблица 5
Динамическая характеристика объекта регулирования
| i | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| t | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Y | 0 | 0 | 0.5 | 0.71 | 0.8 | 0.91 | 0.98 | 0.99 | 0.995 | 1 |
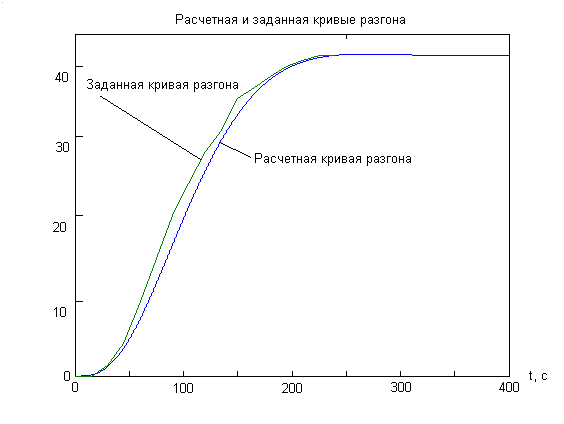
Для получения аналитической зависимости, заданную таблично динамическую характеристику необходимо аппроксимировать экспоненциальным выражением первого порядка. Затем, по наименьшему значению суммы квадратов отклонений для характеристик без запаздывания и с запаздыванием, нужно выбрать наиболее приближенную к экспериментальным данным динамическую характеристику.
После расчета выполненного вручную следует проверить его на ПЭВМ в системе MathCad, а также произвести расчет динамической характеристики второго порядка и выбрать наиболее точную.
Похожие работы
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
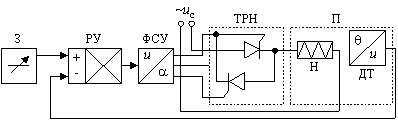
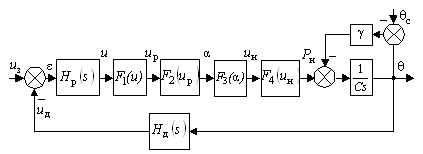
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев