Исследование методов оптимизации
Метод Хука-Дживса
Метод комплексов
Градиентные методы
Метод проектирования градиента
Методы полиномиальной аппроксимации
Кубическая интерполяция
Метод неопределенных множителей Лагранжа
Разработка программного обеспечения метода оптимизации
Работа системы в нормальном режиме
Требования к оборудованию и программному обеспечению
Процессор для диспетчерского пункта
Различия между разными версиями программного обеспечения RSLinx
Версия программного обеспечения RSLinx Gateway
Расчет параметров схем замещения линий
Расчет сети при различных нагрузках
Навигация
Градиентные методы
Анализ режимов работы электрических сетей ОАО "ММК им. Ильича" и разработка адаптивной системы управления режимами электропотребления
118979
знаков
22
таблицы
26
изображений
1.5 Градиентные методы
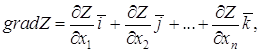
Как следует из названия, эти методы решения нелинейных оптимизационных задач используют понятие градиента функции[3,5,7]. Градиентом функции ![]() называется вектор
называется вектор
 (1.14)
(1.14)
где ![]() - единичные вектора (орты).
- единичные вектора (орты).
Величина этого вектора определяется по выражению
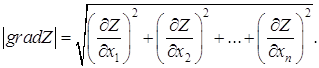 (1.15)
(1.15)
Из (1.14) и (1.15) видно, что функция, градиент которой определяется, должна быть дифференцируемой по всем n переменным.
Физический смысл градиента функции в том, что он показывает направление (1.14) и скорость (1.15) наибольшего изменения функции в рассматриваемой точке. Если в некоторой точке ![]() , функция в этой очке не изменяется (не возрастает и не убывает). Эта точка соответствует экстремуму функции.
, функция в этой очке не изменяется (не возрастает и не убывает). Эта точка соответствует экстремуму функции.
1.5.1 Градиентный метод с постоянным шагом
Сущность градиентных методов решения нелинейных оптимизационных задач [1,5,7] поясним для случая отыскания абсолютного минимума функции двух переменных ![]() , иллюстрируемого рис. 1.2. этот минимум находится в точке с координатами х10 и х20.
, иллюстрируемого рис. 1.2. этот минимум находится в точке с координатами х10 и х20.
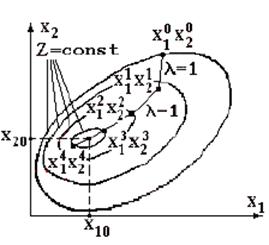
Рисунок 1.2 – Иллюстрация градиентного метода с постоянным шагом ![]()
В соответствии с граничными условиями (1.3), в большинстве практических оптимизационных задач они принимают только положительные или нулевые значения, областью ![]() допустимых значений переменных будет первый квадрант системы координат х1 и х2. в этой области произвольно выберем исходное (нулевое) приближение – точку с координатами х10, х20. значение целевой функции в этой точке составляет Z0. В соответствии с выражением (1.15) вычислим в этой точке величину градиента функции Z.
допустимых значений переменных будет первый квадрант системы координат х1 и х2. в этой области произвольно выберем исходное (нулевое) приближение – точку с координатами х10, х20. значение целевой функции в этой точке составляет Z0. В соответствии с выражением (1.15) вычислим в этой точке величину градиента функции Z.
Выполним шаг единичной длины (![]() ) в направлении убывание функции Z. В результате выполненного шага получим первое приближение – точки с координатами х11, х21. Значение целевой функции в этой точке составляет Z1.
) в направлении убывание функции Z. В результате выполненного шага получим первое приближение – точки с координатами х11, х21. Значение целевой функции в этой точке составляет Z1.
Далее вычислительная процедура повторяется: последовательно получаем 2-е, 3-е и 4-е приближения – точки с координатами х12, х22; х13, х23 и х14, х24. Значения целевой функции в этих точках соответственно составляют Z2, Z3 и Z4.
Из рис. 1.2 видно, что в результате вычиcлительного процесса последовательно осуществляется "спуск" к минимуму функции Z. Вычислительная процедура заканчивается, когда относительное изменение целевой функции на предыдущем i-м и последующем (i+1)-м шагах оказывается меньше заданной точности вычислений ![]() :
:
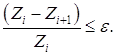 (1.16)
(1.16)
Рассмотренная вычислительная процедура носит название градиентного метода с постоянным шагом. В этом методе все шаги выполнялись одинаковой длины ![]() . Метод достаточно прост. Основной его недостаток – большая вероятность зацикливания вычислительного процесса в окрестности минимума функции Z. В соответствии с рис. 1.2 вычислительный процесс зациклится между точками с координатами х13, х23 и х14, х24. При этом в качестве искомого решения следует принять одну из этих точек.
. Метод достаточно прост. Основной его недостаток – большая вероятность зацикливания вычислительного процесса в окрестности минимума функции Z. В соответствии с рис. 1.2 вычислительный процесс зациклится между точками с координатами х13, х23 и х14, х24. При этом в качестве искомого решения следует принять одну из этих точек.
Для получения более точного результата необходимо выбрать шаг меньшей длины. При этом объем вычислений (количество шагов) увеличится.
Таким образом, точность и объем вычислений в градиентном методе с постоянным шагом определяются величиной этого шага.
1.5.2 Метод скорейшего спуска
Как было отмечено выше, при увеличении длины шага объем вычислений (количество шагов) уменьшается, однако уменьшается и точность определения минимума целевой функции. При уменьшении длины шага точность увеличивается, однако объем вычислений (количество шагов) возрастает.
Поэтому вопрос о выборе рациональной длины шага в градиентных методах является своего рода оптимизационной задачей. Один из способов определения оптимальной длины шага ![]() иллюстрируется на рис. 1.3 и носит название метода скорейшего спуска [1,7].
иллюстрируется на рис. 1.3 и носит название метода скорейшего спуска [1,7].
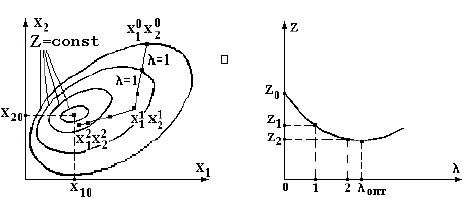
Рисунок 1.3 – Иллюстрация метода скорейшего спуска (а) и параболическая аппроксимация целевой функции для выбора оптимального шага (б)
В методе наискорейшего спуска желательно использовать рассмотренное свойство направления градиента. Поэтому, если мы находимся в точке хi на некотором шаге процесса оптимизации, то поиск минимума функции осуществляется вдоль направления -![]() . Данный метод является итерационным. На шаге i точка минимума аппроксимируется точкой хi . Следующей аппроксимацией является точка
. Данный метод является итерационным. На шаге i точка минимума аппроксимируется точкой хi . Следующей аппроксимацией является точка
![]() (1.17)
(1.17)
где λi - значение λ, минимизирующее функцию.
![]() . (1.18)
. (1.18)
Значение λi может быть найдено с помощью одного из методов одномерного поиска (например, методом квадратичной интерполяции).
В приложении приведена программа, позволяющая реализовать метод наискорейшего спуска. В ней множитель Лагранжа обозначен через h. Вектор di является единичным.
Для поиска минимума функции
![]() (1.19)
(1.19)
в направлении di из точки xi используется метод квадратичной интерполяции.
В точке ![]() , и мы выбираем длину шага λ такой, чтобы шаг "перекрыл " минимум функции φ(λ). Производная
, и мы выбираем длину шага λ такой, чтобы шаг "перекрыл " минимум функции φ(λ). Производная
![]() . (1.20)
. (1.20)
Данный оператор for(i=0;i<n;i++) g2+=g[i]*d[i]; - вычисляет выражение
![]() . (1.21)
. (1.21)
Оператор if (ff[2]>=ff[0] || g2>=0) проверяет условие "перекрытия" минимума, которое выполняется при выполнении либо одного, либо другого условия. Если минимум не попал в отрезок (0,λ), то λ удваивается, и это повторяется столько раз, сколько необходимо для выполнения условия "перекрытия".
Удостоверившись, что отрезок (0,λ) содержит минимум, в качестве третьей точки возьмем точку λ/ 2. Минимальную точку сглаживающего квадратичного полинома находим в соответствии с соотношением
 (1.22)
(1.22)
что отражено следующими операторами
l[3]=h*(ff[1]-.75*ff[0]-.25*ff[2]);
l[3]/=2*ff[1]-ff[0]-ff[2];
Оператор for(i=0;i<n;i++)
{ x[i]=y[i]+l[0]*d[i]; y[i]=x[i]; }
производит присваивание xi+1=xi, и если |g(xi+1)| достаточно мало, то процесс заканчивается. В процессе поиска предполагается сходимость к экстремуму, поэтому для эффективности процедуры разумно уменьшить длину шага. При этом деление шага пополам выбрано произвольно.
В методе скорейшего спуска, по сравнению с градиентным методом с постоянным шагом, количество шагов меньше, точность получаемого результата выше, отсутствует зацикливание вычислительного процесса, однако объем вычислений на одном шаге больше.
0 комментариев