Исследование методов оптимизации
Метод Хука-Дживса
Метод комплексов
Градиентные методы
Метод проектирования градиента
Методы полиномиальной аппроксимации
Кубическая интерполяция
Метод неопределенных множителей Лагранжа
Разработка программного обеспечения метода оптимизации
Работа системы в нормальном режиме
Требования к оборудованию и программному обеспечению
Процессор для диспетчерского пункта
Различия между разными версиями программного обеспечения RSLinx
Версия программного обеспечения RSLinx Gateway
Расчет параметров схем замещения линий
Расчет сети при различных нагрузках
Навигация
Разработка программного обеспечения метода оптимизации
Анализ режимов работы электрических сетей ОАО "ММК им. Ильича" и разработка адаптивной системы управления режимами электропотребления
118979
знаков
22
таблицы
26
изображений
3. Разработка программного обеспечения метода оптимизации
Для оптимизации режимов по реактивной мощности разработан комплекс программ (см. рис. 3.1). Его условно можно разделить на две части:
интерфейсная часть, разработанная в удобном, понятном виде, предназначенная для работы с пользователем любого уровня;
расчетная часть, которая непосредственно выполняет необходимые расчеты для получения оптимальных режимов.
В интерфейсную часть комплекса входят программы ввода следующих параметров:
линий;
трансформаторов;
компенсирующих устройств;
реакторов;
нагрузок.
В расчетную часть входят следующие программы:
формирования узловой матрицы;
формирования векторов узловых токов без оптимизации мощностей компенсирующих устройств;
расчета узловых напряжений;
формирования векторов ограничений узловых токов;
расчета оптимальных значений узловых напряжений;
расчета оптимальных значений мощностей компенсирующих устройств.
Для расчета установившегося неоптимального режима разработаны программы:
формирования матриц узловых проводимостей,
формирования узловых токов источников,
ЛУ разложения матрицы,
решение систем уравнений узловых напряжений.
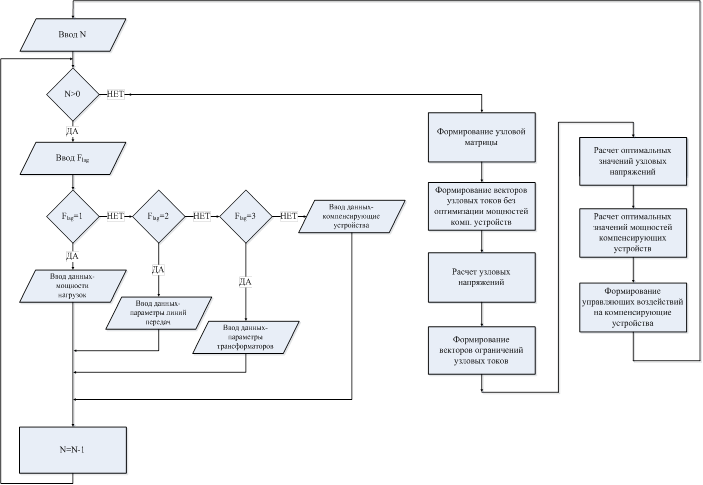
Рисунок 3.1 – Блок-схема разработанного программного обеспечения
Для расчета оптимального режима разработана программа условной оптимизации с нелинейными ограничениями. В качестве исходных данных для этой программы используется узловые напряжения, рассчитанные для неоптимального режима. Оптимизация производится градиентным методом квадратичного программирования.
Программа расчета неоптимального установившегося режима включает в себя алгоритм треугольного разложения матрицы и итерационный алгоритм решения системы нелинейных уравнений подобный методу Гаусса-Зейделя, модифицированный для решения сетевых нелинейных задач.[2,4,8] Особенностью итерационного алгоритма является то, что на каждой последующей итерации для определения узловых токов источников используется значения узловых напряжений, полученное на предыдущей итерации (см. 3.1).
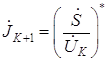 . (3.1)
. (3.1)
Для решения задачи нелинейного программирования и определения оптимальных узловых напряжений был разработана программа NCONF CPP, которая реализует последовательный алгоритм квадратичного программирования и конечноразностный градиент. [12]
NCONF CPP (m, me, n, xguess, ibtype, xlb, xub, xscale, iprint, maxitn; x, fvalue).
Параметры программы NCONF CPP:
входные: m, me, n, xguess, ibtype, xscale, iprint, maxitn;
входной/выходной: xlb, xub;
выходные: x, fvalue.
m - общее число ограничений.
me – число ограничений равенства.
n – число переменных.
x – вектор начальных значений напряжений (активных и реактивных составляющих).
xguess – вектор размена n, содержащий начальное предположение о значениях напряжений;
ibtype – скаляр, задающий вид ограничений на переменные:
ibtype=3 – задаем ограничение на напряжение первого узла, все остальные будут иметь те же ограничения.
xlb – вектор размера n, содержащий нижние границы переменных:
входная, если ibtype=0;
выходная, если ibtype=1 или 2;
входная/выходная, если ibtype=3.
xub - вектор размера n, содержащий верхние границы переменных:
входная, если ibtype=0;
выходная, если ibtype=1 или 2;
входная/выходная, если ibtype=3.
xscale – вектор размера n, содержащий диагональную матрицу масштабирования переменных. Все элементы вектора xscale равны 1.0.
iprint – параметр, задающий желаемый уровень печати; принимает следующие значения:
0 – нет печати;
1 – выводится итоговый анализ о работе программы;
2 – дополнительно на каждой итерации выводится одна строка с промежуточными результатами;
3 – о каждой итерации выводится детальная информация.
maxitn – максимально допустимое число итераций.
х – вектор размера n, содержащий вычисленное решение.
fvalue – скаляр, содержащий значение целевой функции в полученном решении.
Общая задача нелинейного программирования, решаемая данной программой NCONF CPP, состоит в поиске минимума целевой функции
![]() (3.2)
(3.2)
с ограничениями
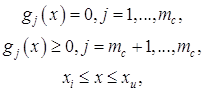 (3.3)
(3.3)
где все функции задачи являются непрерывно дифференцируемыми.
При решении поставленной задачи целевая функция представляет собой потери мощности и имеет вид:
 , (3.4)
, (3.4)
где ![]() - соответственно активная и реактивная составляющие векторов узловых напряжений;
- соответственно активная и реактивная составляющие векторов узловых напряжений;
![]() - соответственно активная и реактивная составляющие векторов узловых проводимостей.
- соответственно активная и реактивная составляющие векторов узловых проводимостей.
Роль нелинейных ограничений выполняет система узловых уравнений с источниками реактивной мощности.
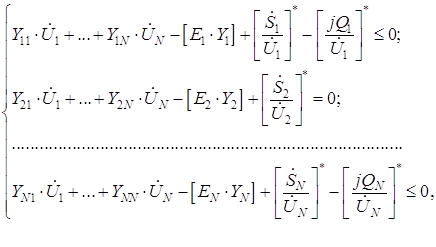 (3.5)
(3.5)
где Y11, …,Y1N – собственные и взаимные проводимости,
U1,…,U2 – узловые напряжения.
Некоторые уравнения системы (3.5) могут не содержать составляющую  в том случае, если в узлах, для которых составляются данные уравнения, не установлены компенсирующие устройства. Такое уравнение вместо знака ≤ будет содержать знак равенства и считаться линейным.
в том случае, если в узлах, для которых составляются данные уравнения, не установлены компенсирующие устройства. Такое уравнение вместо знака ≤ будет содержать знак равенства и считаться линейным.
Кроме целевой функции и ограничений любая задача минимизации должна иметь и граничные условия:
![]() , (3.6)
, (3.6)
т.е. значения напряжений в любом, даже самом удаленном от источника узле не должны выйти за рамки, нормируемые ПУЭ.
Метод, используемый данной программой NCONF CPP, основан на последовательном выделении и решении подзадач квадратичного программирования, которые получаются в результате применения квадратичной аппроксимации лангранжиана и линеаризации ограничений[8,12]. Таким образом, на каждой итерации решается подзадача
![]() (3.7)
(3.7)
с ограничениями
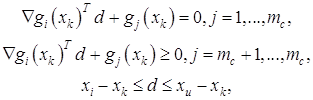 (3.8)
(3.8)
где Bk – положительно определенная аппроксимация гессиана;
xk – текущая точка.
Пусть dk – решение подзадачи. Тогда новая точка xk+1 определяется в результате линейного поиска:
![]() (3.9)
(3.9)
Новая точка такова, что в ней функция качества имеет наименьшее значение. В качестве функции качества употребляется функция Лагранжа. Если оптимум не достигнут, то матрица Bk пересчитывается по положительно определенной формуле секущих.
Главная программа NCONF CPP содержит несколько подпрограмм:
foryzc – программа формирования матрицы узловых проводимостей;
luc – программа используется для разложения матрицы на треугольные сомножители;
rluc – программа, которая отвечает за решение системы уравнений.
4. Разработка адаптивной системы управления режимами электропотребления
4.1 Функции автоматизированной системы
Сбор, накопление и передача информации, характеризующей режим электропотребления комбината (информация о нагрузках).
Сбор, накопление и передача информации, характеризующей состояние электрической сети (информация об обрывах линий и переводах в ремонт оборудования)
Передача информации с контрольных точек на диспетчерский пункт и обратно.
Обработка полученной информации, расчет режима электропотребления
Автоматическое изменение параметров устройств, регулирующих реактивную мощность, в местах, где это возможно.
4.2 Описание работы системы
4.2.1 Ввод системы в работу
При первоначальном запуске системы в эксплуатацию собирается информация о конфигурации электрической сети.
Собираются следующие параметры:
схема сети;
информация о линиях: длина, марка проводов или кабеля, которыми выполнено питание между подстанциями.
После предварительного расчета, для упрощения работы программного обеспечения в базу данных диспетчерского пункта заносятся следующие параметры:
узловая топологическая матрица согласно схеме замещения электрической сети;
матрица узловых проводимостей схемы;
зарядные мощности линий.
Эти данные хранятся в сервере диспетчерской и используются в качестве исходных данных для последующего расчета режима работы сети. Изменяться эти данные могут в случае изменения конфигурации сети при плановых или аварийных выводах оборудования из работы.
0 комментариев