Исследование методов оптимизации
Метод Хука-Дживса
Метод комплексов
Градиентные методы
Метод проектирования градиента
Методы полиномиальной аппроксимации
Кубическая интерполяция
Метод неопределенных множителей Лагранжа
Разработка программного обеспечения метода оптимизации
Работа системы в нормальном режиме
Требования к оборудованию и программному обеспечению
Процессор для диспетчерского пункта
Различия между разными версиями программного обеспечения RSLinx
Версия программного обеспечения RSLinx Gateway
Расчет параметров схем замещения линий
Расчет сети при различных нагрузках
Навигация
Метод неопределенных множителей Лагранжа
Анализ режимов работы электрических сетей ОАО "ММК им. Ильича" и разработка адаптивной системы управления режимами электропотребления
118979
знаков
22
таблицы
26
изображений
1.9 Метод неопределенных множителей Лагранжа
Естественно, что решение задач условной оптимизации значительно сложнее решения задач безусловной оптимизации [3]. Естественно стремление сведения задачи условной оптимизации (поиска относительного экстремума) к более простой задаче безусловной оптимизации (поиска абсолютного экстремума). Такая процедура осуществляется в методе Лагранжа. Рассмотрим сущность этого метода.
Необходимо найти условный экстремум нелинейной функции
![]() (1.55)
(1.55)
n переменных, при m ограничениях
 (1.56)
(1.56)
Ограничения-неравенства преобразуются в равенства, а свободные члены переносятся в левые части ограничений, т.е. система (1.56) приводится к виду
 (1.57)
(1.57)
В соответствии с методом Лагранжа вместо относительного экстремума функции (1.55) при ограничениях (1.57) ищется абсолютный экстремум функции Лагранжа, которая имеет следующий вид:
 (1.58)
(1.58)
где ![]() - неопределенные множители Лагранжа, являющиеся, как и переменные
- неопределенные множители Лагранжа, являющиеся, как и переменные ![]() искомыми переменными.
искомыми переменными.
Видно, что в функцию Лагранжа входит целевая функция плюс каждое ограничение, умноженное на множитель Лагранжа.
Доказано, что относительный экстремум целевой функции (1.55) при ограничениях (1.57) совпадает с абсолютным экстремумом функции Лагранжа (1.58).
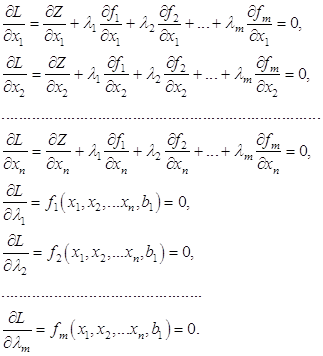
Поиск абсолютного экстремума функции (1.58) выполняется известными методами. В частности, определяются и приравниваются к нулю частные производные функции Лагранжа:
![]() (1.59)
(1.59)
Последние m уравнений представляют собой ограничения (1.57) оптимизационной задачи.
Система (1.59) содержит (m+n) уравнений и такое же количество неизвестных.
Решение системы (1.59) даст координаты абсолютного минимума функции Лагранжа (1.58) или относительного минимума целевой функции (1.55) при ограничениях (1.57).
Решение системы (1.59) выполняется известными методами вычислительной математики. Если система (1.59) линейная, используется, как правило, метод Гаусса. Если система (1.59) нелинейная – метод Ньютона.
1.10 Выбор метода оптимизации
Перед выбором метода оптимизации, проведем краткий анализ задач, которые должно решать разрабатываемое программное обеспечение:
программа должна решать задачу условной минимизации, т.е. находить относительный экстремум, так как в математической модели кроме линейных ограничений будут иметь место и нелинейные;
так как целевая функция – функция нескольких переменных, то она может иметь несколько экстремумов, и в этом случае программа должна осуществлять поиск локального минимума.
Проведя анализ наиболее часто использующихся методов оптимизации, для реализации поставленной цели был выбран градиентный метод квадратичного программирования, который представляет собой наиболее эффективный из вышеперечисленных градиентных методов, модифицированный с методами полиномиальной аппроксимации.
Предполагается, что целевая функция и граничные условия аппроксимируются квадратичными зависимостями или полиномами второго порядка. Более подробно этот метод будет рассмотрен далее в разделе "Разработка программного обеспечения метода оптимизации".
Данный метод позволяет создать надежную программу, соответствующую всем вышеперечисленным требованиям.
2. Разработка метода оптимизации по реактивной мощности
Требуемая в электроэнергетической системе (ЭЭС) суммарная мощность компенсирующих устройств определяется из уравнения баланса реактивной мощности (6.1). Эту мощность необходимо разместить в узлах электрической сети с минимальными затратами.
![]() , (2.1)
, (2.1)
где ![]() - суммарная реактивная мощность, генерируемая в ЭЭС, включая реактивную мощность, поступающую из соседних ЭЭС;
- суммарная реактивная мощность, генерируемая в ЭЭС, включая реактивную мощность, поступающую из соседних ЭЭС;
![]() - суммарная реактивная мощность потребителей ЭЭС, включая реактивную мощность, отдавая в соседние ЭЭС;
- суммарная реактивная мощность потребителей ЭЭС, включая реактивную мощность, отдавая в соседние ЭЭС;
![]() - суммарная реактивная мощность собственных нужд электростанций;
- суммарная реактивная мощность собственных нужд электростанций;
![]() - суммарные потери реактивной мощности;
- суммарные потери реактивной мощности;
![]() - суммарное потребление реактивной мощности в ЭЭС.
- суммарное потребление реактивной мощности в ЭЭС.
Рассмотрим простейшую схему существующей сети (рис.2.1). от источника питания с напряжением U через сопротивление сети R получает питание нагрузка мощностью S=P+jQ [9]. На шинах нагрузки установлено компенсирующее устройство мощностью Qк.
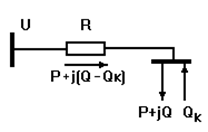
Рисунок 2.1 – Простейшая схема компенсации реактивной мощности
Потери активной мощности в линии при отсутствии у потребителя компенсирующего устройства (![]() ) составляют
) составляют
 . (2.2)
. (2.2)
При установке у потребителя компенсирующего устройства (![]() ) эти потери уменьшатся до величины
) эти потери уменьшатся до величины
 . (2.3)
. (2.3)
Таким образом, компенсация реактивной мощности позволяет уменьшить потери активной мощности в схеме электроснабжения и, следовательно, улучшить технико-экономические показатели этой схемы.
Оценим влияние КУ на затраты в сети.
Выражение для суммарных затрат на передачу мощности к нагрузке при установке КУ будет иметь вид:
 (2.4)
(2.4)
где ЗК – затраты на КУ;
соΔР – затраты на покрытие потерь активной мощности в сети;
со – стоимость единицы потерянной активной мощности;
зк – удельные затраты на КУ.
Для определения минимума функции З приравняем к нулю ее производную от переменной QK:
 (2.5)
(2.5)
Из (2.5) определяется экономически целесообразная реактивная мощность, передача которой от источника к потребителю отвечает минимуму затрат З
 (2.6)
(2.6)
Величина QЭ не зависит от активной мощности Р, а зависит лишь от соотношения стоимостных показателей зк и со и параметров сети U и R, по которой передается мощность.
Вопрос о размещении компенсирующих устройств в электрической сети реальной ЭЭС представляет собой сложную оптимизационную задачу. Сложность заключается в том, что электроэнергетические системы являются большими системами, состоящими из взаимосвязанных подсистем. Рассматривать изолированно каждую отдельную подсистему нельзя, поскольку свойства больших систем определяются характером взаимосвязей отдельных подсистем.
При анализе больших систем используется системный подход [9,10,11], согласно которому анализ большой системы выполняется при разделении ее на подсистемы, непосредственно не связанные между собой, но влияющие друг на друга через систему более высокого уровня.
Применительно к рассматриваемому вопросу электрическая сеть представляется разными уровнями, как это показано на рис. 2.2. верхний уровень – это электрическая сеть напряжением 110 кВ и выше. Эта сложнозамкнутая электрическая сеть, представляемая полной схемой замещения, показана на рис.2.2 условно, как ЭС1. Реактивные мощности, вырабатываемые генераторами электростанций QЭС, компенсирующими устройствами QК, линиями электропередачи QС, а также реактивные мощности, протекающие по связям с соседними ЭС2 и ЭС3 (Q12, Q21, Q13, Q31) обеспечивают в ЭС1 располагаемую реактивную мощность Qр1.
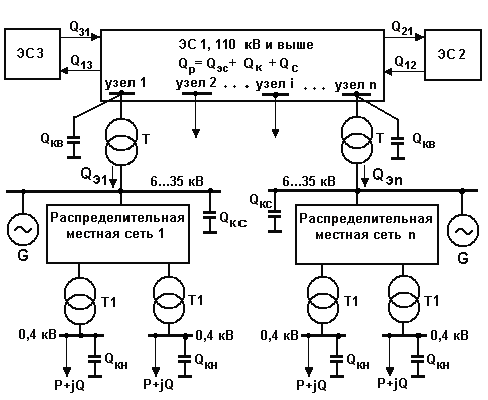
Рисунок 2.2 – Схема размещения КУ в электрической сети
Второй уровень – это множество n разомкнутых местных распределительных сетей напряжением 35 кВ и ниже, присоединенных к n узлам электрической сети верхнего уровня через трансформаторы Т. Эти местные распределительные сети непосредственно не связаны между собой, но влияют друг на друга через сеть верхнего уровня. Синхронные генераторы, компенсаторы и двигатели в каждой такой распределительной сети представлены одной эквивалентной синхронной машиной G. От местных электрических сетей через распределительные трансформаторы Т1 питаются низковольтные потребители P+jQ.
Компенсирующие устройства могут устанавливаться на шинах высшего (jQкв) и низшего (jQкс) напряжения трансформаторов Т, а также на шинах 0,4 кВ распределительных трансформаторов Т1 и в самой сети 0,4 кВ (jQкн). Значение мощностей этих КУ и подлежит определению.
В общем виде задача оптимизации размещения КУ формулируется следующим образом: определить реактивные мощности имеющихся в узлах 6…35 кВ синхронных машин G, мощности КУ в сетях всех напряжений Qкв, Qкс, Qкн, а также значения реактивных мощностей Qэi (i=1, 2, …n), передаваемых в сети потребителей, при которых обеспечивается минимум суммарных затрат.
Расчеты компенсации реактивной мощности для сетей всех видов выполняются как при проектировании развития электрических сетей, так и в условиях их эксплуатации. При проектировании определяются мощности КУ и решается задача их распределения в электрической сети. В условиях эксплуатации определяют оптимальные режимы имеющихся КУ в течение суток. Критериями оптимальности в этом случае служат минимум потерь мощности и энергии и соответствие отклонений напряжений допустимым значениям.
При проектировании схемы электроснабжения, как правило, минимизируются денежные затраты на эту схему. Снижение потерь мощности за счет установки КУ уменьшает затраты на схему, по следующим причинам:
каждый потерянный кВт мощности необходимо выработать на электростанциях и, следовательно, затратить на это денежные средства;
генерация недополученной реактивной мощности на электростанциях обходится гораздо дороже, чем потребление (в 3 раза!).
Однако и компенсирующие устройства требуют денежных затрат.
В связи с этим возникает задача определения оптимальной мощности компенсирующих устройств, отвечающей минимуму суммарных затрат. Такая задача относится к задаче безусловной оптимизации и может быть решена, например, градиентными методами.
Рассмотрим такую задачу для магистральной схемы электроснабжения (рис. 2.3). Необходимо определить мощности компенсирующих устройств QК1 и QК2 в узлах 1 и 2 исходя из условия минимума суммарных затрат на установку этих устройств и покрытие потерь активной мощности в схеме.
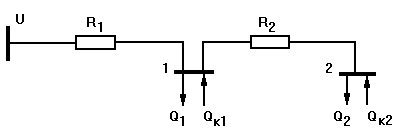
Рисунок 2.3 – Схема электроснабжения
Исходные данные:
напряжение схемы U;
сопротивления линий R1 и R2;
реактивные нагрузки узлов 1 и 2 Q1 и Q2;
удельные затраты на установку компенсирующих устройств zo;
удельные затраты на покрытие потерь активной мощности со.
Целевая функция, представляющая собой суммарные затраты на установку компенсирующих устройств и покрытие потерь активной мощности в схеме, имеет следующий вид
![]() (2.7)
(2.7)
где а1=R1∙co∙10-3/U2=0,0006;
а2=R2∙co∙10-3/U2=0,0004.
Введение числового коэффициента 10-3 необходимо для приведения всех составляющих целевой функции к одной размерности (у.е.).
Для решения задачи выберем метод покоординатного спуска. Определим частные производные целевой функции Z по переменным Q1 и Q2:
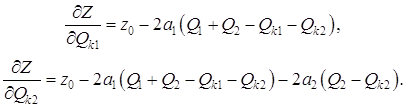 (2.8)
(2.8)
Примем исходное приближение:
 (2.9)
(2.9)
Для этих значений вычислим значения целевой функции и ее частных производных.
Примем, что в направлении переменной Qk2 целевая функция Z убывает сильнее, чем в направлении переменной Qk1, т.е.
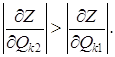 (2.10)
(2.10)
В направлении переменной Qk2 и начнем спуск.
Примем величину шага ![]() =400 квар. Первое приближение (первый шаг) будет Qk11=0, Qk21=400 квар. Рассчитываем значение целевой функции Z1.
=400 квар. Первое приближение (первый шаг) будет Qk11=0, Qk21=400 квар. Рассчитываем значение целевой функции Z1.
Второй шаг: Qk12=0, Qk22=400 квар. Рассчитываем значение целевой функции Z2.
Спуск по координате Qk2 следует продолжать до тех пор, пока Zn<Zn-1. Как только Zn становится больше предыдущего значения Zn-1, следует спуск координате Qk2 прекратить и вернуться к значениям переменных Qk1n-1 и Qk2n-1, полученным на n-1 шаге.
Выполним новый шаг в направлении другой переменной Qk1. Находится новое значение целевой функции Z. Спуск по этой переменной продолжается так же, как и в направлении Qk2 – до тех пор, пока Zm<Zm-1.
Точка с полученными координатами Qk1m-1, Qk2n-1 находится в окрестности минимума целевой функции Z. При принятой длине шага ![]() =400квар более точное решение получено быть не может. Для получения более точного решения необходимо уменьшить шаг и продолжить спуск. Абсолютно точно что, чем меньше шаг, тем точнее будет результат. Посредством ручного расчета мы не можем добиться такой точности. Для решения этой задачи целесообразно будет использовать программное обеспечение, предназначенное для решения задачи нелинейного программирования с нелинейными ограничениями. Одним из таких языков программирования является язык С++.
=400квар более точное решение получено быть не может. Для получения более точного решения необходимо уменьшить шаг и продолжить спуск. Абсолютно точно что, чем меньше шаг, тем точнее будет результат. Посредством ручного расчета мы не можем добиться такой точности. Для решения этой задачи целесообразно будет использовать программное обеспечение, предназначенное для решения задачи нелинейного программирования с нелинейными ограничениями. Одним из таких языков программирования является язык С++.
Это была рассмотрена задача безусловной оптимизации, т.е. нахождения абсолютного минимума. При решении поставленной задачи для нахождения оптимального режима работы сети ОАО "ММК им. Ильича" требуется найти относительный минимум, так как система ограничений будет иметь нелинейный вид (см. далее "Разработка программного обеспечения"). Таким образом, перед нами ставится задача условной оптимизации по реактивной мощности, для которой мы применяем выбранный ранее градиентный метод квадратичного программирования.
0 комментариев