Исследование методов оптимизации
Метод Хука-Дживса
Метод комплексов
Градиентные методы
Метод проектирования градиента
Методы полиномиальной аппроксимации
Кубическая интерполяция
Метод неопределенных множителей Лагранжа
Разработка программного обеспечения метода оптимизации
Работа системы в нормальном режиме
Требования к оборудованию и программному обеспечению
Процессор для диспетчерского пункта
Различия между разными версиями программного обеспечения RSLinx
Версия программного обеспечения RSLinx Gateway
Расчет параметров схем замещения линий
Расчет сети при различных нагрузках
Навигация
Метод проектирования градиента
Анализ режимов работы электрических сетей ОАО "ММК им. Ильича" и разработка адаптивной системы управления режимами электропотребления
118979
знаков
22
таблицы
26
изображений
1.5.3 Метод проектирования градиента
Рассмотренные выше градиентные методы предполагали отыскание абсолютного минимума целевой функции Z. При наличии в математической модели нелинейных ограничений ищется уже не абсолютный, а относительный минимум целевой функции Z [1].
Рассмотрим один из методов отыскания относительного минимума целевой функции, получивший название метода проектирования градиента.
Для упрощения алгоритма допустим, что имеется одно ограничение в виде линейного неравенства
![]() (1.23)
(1.23)
При наличии указанного ограничения минимум целевой функции следует искать в области ![]() , расположенной по одну сторону от прямой
, расположенной по одну сторону от прямой ![]() например выше этой прямой (рис. 1.4).
например выше этой прямой (рис. 1.4).
Начало вычислительной процедуры такое же, как и в предыдущих методах:
в области ![]() принимается исходное (нулевое) приближение х10, х20;
принимается исходное (нулевое) приближение х10, х20;
вычисляется значение целевой функции в этой точке Z0;
в соответствии с выражением (1.15) в этой точке вычисляется градиент целевой функции grad Z;
из исходной точки в направлении убывания целевой функции выполняется шаг.
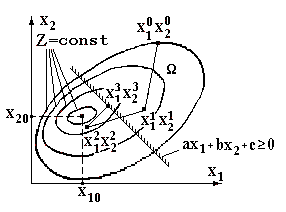
Рисунок 1.4 – Иллюстрация метода проектирования градиента
Выбор величины шага может осуществляться различным образом. Выберем шаг в соответствии с алгоритмом метода скорейшего спуска и получим первое приближение – точку с координатами х11, х21. Вычисляется значение целевой функции в этой точке Z1.
Необходимо проверить, принадлежит ли точка с координатами х11, х21 области ![]() допустимых значений переменных. Для этого проверяется неравенство (1.23), в которое подставляются координаты х11, х21:
допустимых значений переменных. Для этого проверяется неравенство (1.23), в которое подставляются координаты х11, х21:
![]() (1.23)
(1.23)
Если это неравенство выполняется, вычислительный процесс продолжается.
Из точки с координатами х11, х21 выполняется следующий шаг. В результате этого шага имеем второе приближение – точку с координатами х12, х22. значение целевой функции в этой точке Z2.
Пусть для этой точки неравенство ![]() не выполняется. Следовательно, точка с координатами х12, х22 вышла из области
не выполняется. Следовательно, точка с координатами х12, х22 вышла из области ![]() и необходимо выполнить возврат в эту область.
и необходимо выполнить возврат в эту область.
Возврат в область ![]() выполняется следующим образом. Из точки с координатами х12, х22 опускается перпендикуляр на прямую
выполняется следующим образом. Из точки с координатами х12, х22 опускается перпендикуляр на прямую ![]() т.е. конец вектора (х11, х21; х12, х22) проектируется на эту прямую. В результате получается новое приближение – точка с координатами х13, х23, которая принадлежит области
т.е. конец вектора (х11, х21; х12, х22) проектируется на эту прямую. В результате получается новое приближение – точка с координатами х13, х23, которая принадлежит области ![]() . В этой точке вычисляется значение целевой функции Z3.
. В этой точке вычисляется значение целевой функции Z3.
Дальнейший спуск к относительному минимуму целевой функции продолжается из точки х13, х23. на каждом шаге вычисляется значение целевой функции и проверяется принадлежность нового приближения к области ![]() . Вычислительный процесс заканчивается при выполнении условия (1.16).
. Вычислительный процесс заканчивается при выполнении условия (1.16).
1.6 Метод штрафных функций
Рассмотрим задачу поиска локального минимума критерия оптимальности W в области, ограниченной системой неравенств (3.16)-(3.17). Введение обобщенного критерия оптимальности по методу штрафных функций [3,5] производится с помощью непрерывной функции
 . (1.24)
. (1.24)
Обобщенным критерием оптимальности согласно методу штрафных функций является выражение
T=W+RQ(x),
где R - некоторое положительное число, называемое коэффициентом штрафа.
Рассматривается некоторая неограниченная, монотонно возрастающая последовательность {Rk}, k=1,2,... положительных чисел. Для первого элемента этой последовательности с помощью метода покоординатного спуска отыскивается локальный минимум функции T. Пусть этот минимум достигается при значениях (b*,R1).
Вектор (b*,R1) используется как начальное приближение для решения задачи поиска минимума функции T где R2>R1 и т.д. Таким образом, решается последовательность задач минимизации функций T(b*,Rk), k=1,2 ..., причем результат предыдущей оптимизации используется в качестве начального приближения для поиска последующей.
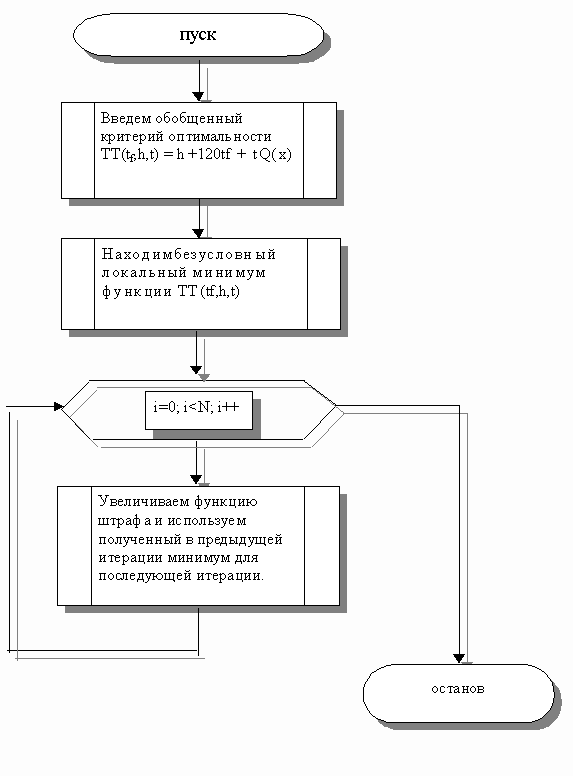
Рисунок 1.5 – Блок-схема метода штрафных функций
0 комментариев