Краткие теоретические сведения
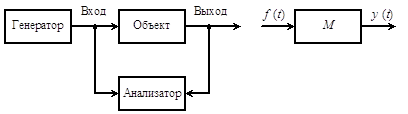
Анализ объектов
Анализ нелинейных стационарных объектов
Получение формулы Ньютона. Определим рекуррентное соотношение для нахождения корня методом Ньютона
Последовательность выполнения работы
Краткие теоретические положения
Численные методы решения обыкновенных дифференциальных уравнений
Навигация
Анализ нелинейных стационарных объектов
Анализ линейных стационарных объектов
34983
знака
6
таблиц
8
изображений
2. Анализ нелинейных стационарных объектов
Цель работы: исследовать параметры нелинейных стационарных объектов, описываемых системами нелинейных алгебраических уравнений, используя для их решения средства пакета MathCAD.
Содержание работы:
1) изучить теоретические положения (раздел 2.1), раскрывающие структуру нелинейных стационарных объектов, их математическое описание и пример решения систем нелинейных алгебраических уравнений средствами пакета MathCAD, используемый для анализа такого рода объектов;
2) выполнить индивидуальное задание согласно предусмотренной в разд.2.2 последовательности выполнения работы;
3) оформить описание раздела по контрольной работе согласно требованиям задания.
2.1. Краткие теоретические сведения
Структура и математическая модель объекта
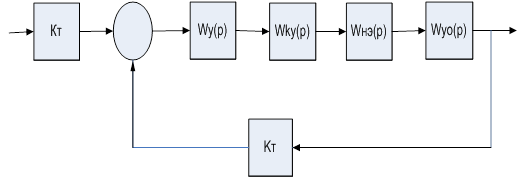
Структурная схема нелинейного стационарного объекта имеет вид:
|
|
|
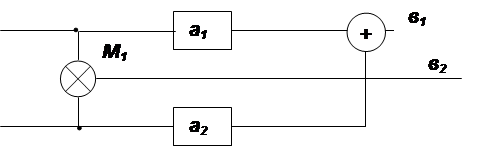
Такой объект представляет собой систему, которая имеет два входа х1 и х2спостоянными значениями в установившемся режиме и два выхода в1 и в2. Структура объекта определяется сумматором S1 , умножителем М1, двумя линейно– усилительными блоками а1, а2и системой связей между ними.
В отличие от линейных стационарных объектов нелинейные описываются системами нелинейных алгебраических уравнений.
Математическая модель, соответствующая такой схеме, имеет вид:
![]() а1х1 +а2х2=в1;
а1х1 +а2х2=в1;
х1х2=в2
2.1.2. Анализ объектов
Исследование такого рода объектов состоит в определении значений входных воздействий х1 ,х2 в зависимости от значений выходов в1ив2 при заданных параметрах объекта а1иа2.
Реализация решения задачи исследования нелинейного стационарного объекта в такой постановке может быть осуществлена с помощью средств системы символьной математики MathCAD 7.0 PRO .
2.1.3. Решение нелинейных алгебраических и трансцендентных уравнений
2.1.3.1. Постановка задачи. Пусть дано уравнение
![]() , (2.1)
, (2.1)
где функция ![]() определена и непрерывна на некотором интервале (А,В). Всякое значение
определена и непрерывна на некотором интервале (А,В). Всякое значение ![]() , обращающее функцию
, обращающее функцию ![]() в нуль, то есть такое, при котором
в нуль, то есть такое, при котором ![]() , называется корнем уравнения (2.1), а процесс нахождения
, называется корнем уравнения (2.1), а процесс нахождения ![]() называется его решением.
называется его решением.
Если функция ![]() представляет собой многочлен относительно
представляет собой многочлен относительно ![]() , то уравнение называется нелинейным алгебраическим (например,
, то уравнение называется нелинейным алгебраическим (например, ![]() ); если в функцию
); если в функцию ![]() входят элементарные (тригонометрические, логарифмические, показательные и т.п.) функции, то такое уравнение называется трансцендентным (например,
входят элементарные (тригонометрические, логарифмические, показательные и т.п.) функции, то такое уравнение называется трансцендентным (например, ![]() ).
).
2.1.3.2. Характеристика методов. Методы решения нелинейных алгебраических и трансцендентных уравнений (НАТУ) делятся на прямые и итерационные. Первые позволяют найти решение непосредственно с помощью формул и всегда обеспечивают получение точного решения. Однако прямые методы имеются только для ограниченного круга уравнений, поэтому на практике более широко используются итерационные методы.
В итерационных методах процедура решения задается в виде многократного применения некоторого алгоритма. Полученное решение всегда является приближенным, хотя может быть сколь угодно близким к точному.
В общем случае задача решается в 2 этапа:
определение приближенных значений корней уравнения;
уточнение корней до заданной степени точности с помощью одного из итерационных методов.
Для определения приближенных значений корней уравнения используются:
1) Построение графика функций ![]() и приближенное определение точек, где кривая пересекает ось Х.
и приближенное определение точек, где кривая пересекает ось Х.
Запись уравнения ![]() в виде
в виде ![]() и построение графиков двух функций:
и построение графиков двух функций: ![]() и
и ![]() . Точка их пересечения и есть корень исходного уравнения (5.1).
. Точка их пересечения и есть корень исходного уравнения (5.1).
На втором этапе происходит уточнение корня с использованием критерия окончания итерационного процесса.
Итерационный процесс следует оканчивать, когда ![]() <
< ![]() , т.е. при близости двух последовательных приближений к корню.
, т.е. при близости двух последовательных приближений к корню.
Одним из итерационных методов для уточнения корня является метод Ньютона.
2.1.3.3. Метод Ньютона
2.1.3.3.1. Геометрическая интерпретация метода Ньютона.
Приняв в качестве начального приближения к корню ![]() некоторое значение
некоторое значение ![]() , восстанавливаем перпендикуляр в точке
, восстанавливаем перпендикуляр в точке ![]() к оси Х. В точке пересечения перпендикуляра с графиком функции
к оси Х. В точке пересечения перпендикуляра с графиком функции ![]() , для которой отыскивается нуль, проводим касательную к кривой. Точка пересечения касательной с осью Х дает новое приближение
, для которой отыскивается нуль, проводим касательную к кривой. Точка пересечения касательной с осью Х дает новое приближение ![]() к корню. После этого процесс повторяем для точки
к корню. После этого процесс повторяем для точки ![]() , получаем точку
, получаем точку ![]() и т.д.
и т.д.
Похожие работы
уле . Т.о. имеем: Минимальная энергия: Найдем управление по следующей формуле: Тогда оптимальное управление . 3.2 Оптимальная L – проблема моментов в пространстве состояний Система задана в виде: Решение ДУ имеет вид: , при имеем: . Составим моментные уравнения: Подставляя необходимые данные в выше приведенные формулы, получим следующие ...
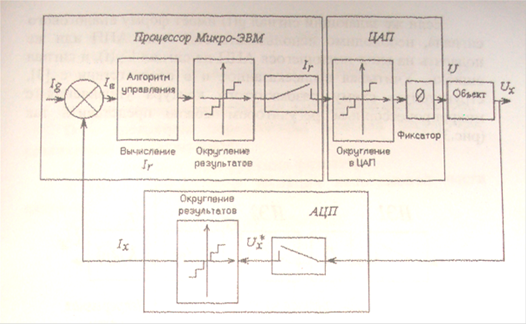

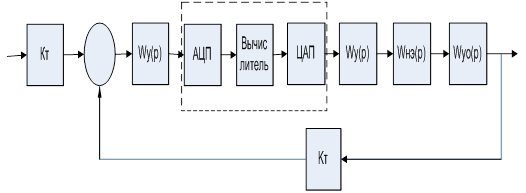
... , Полученные данные будут составлять так называемую неизменяемую часть системы. Получим, что передаточная функция такой неизменяемой части системы имеет вид 2. Структурная схема САУ с микропроцессорным регулятором Поскольку микропроцессорный регулятор построен на базе Микро-ЭВМ и может обрабатывать сигналы только дискретной формы" а сигнал на выходе объекта Ux и регулирующий сигнал Ur - ...
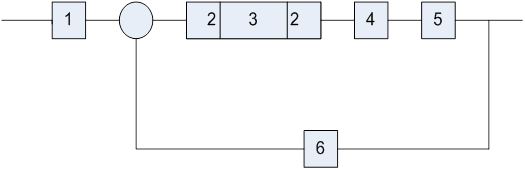
... цепи W1(s) = Wp(s) представлено как параллельное соединение простейших звеньев. 2.9 Неопределенность моделей систем управления Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в ...
... , на нерегулируемые его влияние не распространяется. Учет по центрам ответственности позволяет оценить деятельность подразделения и его руководителя, обеспечивает оперативный учет, анализ и контроль, а также предоставление информации о затратах. Задачи анализа затрат на качество обусловливают введение двух отчетных форм: - сводный отчет о затратах на качество, содержащий полную информацию о ...
0 комментариев