Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
Проектирование системы диагностики отказов
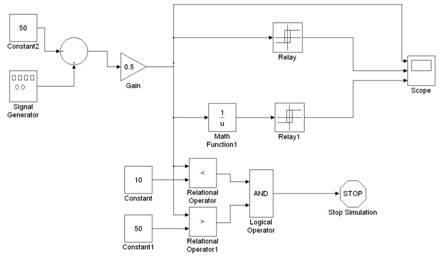
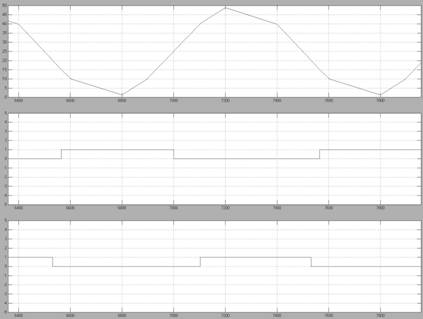
Моделирование отказов в Vissime
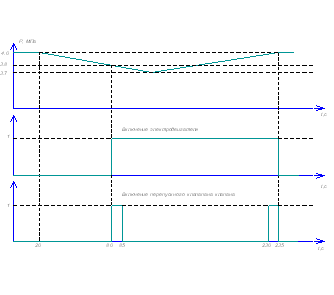
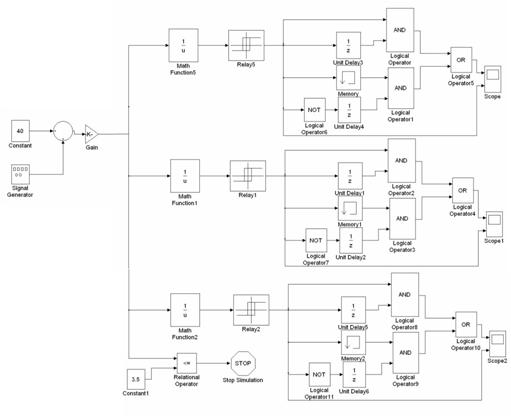
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Проектирование наблюдателей при неизвестном входе
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
2.4.1. Проектирование наблюдателей при неизвестном входе
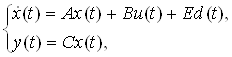
Будем рассматривать такой класс систем, в котором неопределенности системы могут быть представлены в качестве неизвестной аддитивной составляющей, а динамические уравнения имеют такой вид:
 (2.50)
(2.50)
где ![]() - вектор состояния,
- вектор состояния, ![]() - известный вектор входа,
- известный вектор входа, ![]() - вектор выхода и
- вектор выхода и ![]() - вектор неизвестного входа (или возмущения). A,B,C - известные матрицы соответствующих размерностей.
- вектор неизвестного входа (или возмущения). A,B,C - известные матрицы соответствующих размерностей.
Составляющая Ed(t) может быть использована для описания как аддитивных возмущений так и для других видов моделируемых неопределенностей. Например, шума, составляющих связей в крупномасштабных системах, нелинейных составляющих в динамике системы, составляющих, возникающих из-за изменения во времени динамики системы, ошибок линеаризации и ошибок понижения порядка модели, вариаций параметров.
Определение 2.1. Наблюдатель называется наблюдателем при неизвестном входе для системы, описываемой уравнением (2.50), если вектор ошибки оценки состояния ex(t) асимптотически стремится к нулю, не смотря на наличие неизвестного входа (возмущения) в системе.
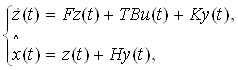
Структура наблюдателя полного порядка может быть представлена следующим образом:
 (2.52)
(2.52)
где ![]() - оцениваемый вектор состояния, а
- оцениваемый вектор состояния, а ![]() - вектор состояния этого наблюдателя полного порядка, F, T, K, H – матрицы, которые необходимо спроектировать для выполнения отделения неизвестного входа и других требований проектирования. Наблюдатель, описываемый уравнениями (2.52) представлен на рисунке 2.18.
- вектор состояния этого наблюдателя полного порядка, F, T, K, H – матрицы, которые необходимо спроектировать для выполнения отделения неизвестного входа и других требований проектирования. Наблюдатель, описываемый уравнениями (2.52) представлен на рисунке 2.18.
Когда наблюдатель (2.52) проектируется для системы (2.51) ошибка оценки (ex(t) =![]() -
- ![]() ) удовлетворяет уравнению:
) удовлетворяет уравнению:
 (2.53)
(2.53)
где К=К1+К2. (2.54)
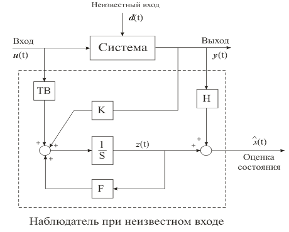
Рис. 2.18. Структура наблюдателя при неизвестном входе полного порядка
Если выполняются следующие равенства:
![]() , (2.55)
, (2.55)
![]() , (2.56)
, (2.56)
![]() , (2.57)
, (2.57)
![]() , (2.58)
, (2.58)
то ошибка оценки будет:
![]() . (2.59)
. (2.59)
Если все собственные числа F устойчивы, ex(t) будет асимптотически стремиться к нулю, т.е. ![]() Это означает, что наблюдатель (2.52), в соответствии с определением 2.1, является наблюдателем при неизвестном входе для системы (2.51). Проектирование этого наблюдателя заключается в решении уравнений (2.54)-(2.58) и выборе матрицы F так, чтобы все ее собственные числа были устойчивы.
Это означает, что наблюдатель (2.52), в соответствии с определением 2.1, является наблюдателем при неизвестном входе для системы (2.51). Проектирование этого наблюдателя заключается в решении уравнений (2.54)-(2.58) и выборе матрицы F так, чтобы все ее собственные числа были устойчивы.
Теорема 2.1. Необходимыми и достаточными условиями существования наблюдателя (3.2) при неизвестном входе для системы описываемой уравнением (4.51) является:
1. ранг (CE) = ранг (E),
2. ( А1, С) является обнаруживаемой парой где
А1 = А – Е(СЕ)+СА. (2.62)
Стоит заметить, что для удовлетворения условия (1) теоремы 2.1 число независимых строк в матрице С должно быть меньше чем число независимых столбцов матрицы Е. Это означает, что максимальное количество возмущений, которые могут быть отделены не может быть больше чем число независимых измерений.
Кроме того, без неизвестных входов в системе, при установке T=I, H=0 и Е=0, наблюдатель (2.52) будет простым наблюдателем Люненбергера. В этом случае, условие (1) Теоремы 2.1 выполняется в любом случае, а условие (2) сводится к условию обнаруживаемости пары (А,С). Это – хорошо известный результат проектирования наблюдателя Люненбергера полного порядка.
Можно показать, что при проектировании наблюдателей при неизвестном входе К1 является матрицей свободных параметров. После вычисления К1для того, чтобы обеспечить устойчивость матрицы динамической системы F, другие параметры матриц наблюдателя могут быть вычислены из соотношения К = К1+ К2и условий (2.55)-(2.58). Некоторая свобода проектирования допускаемая при выборе К1может быть использована, чтобы придать рассогласования необходимые проектировщику характеристики.
Процедура проектирования наблюдателя при неизвестном входе может быть представлена следующим образом:
Похожие работы
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев