Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
Проектирование системы диагностики отказов
Моделирование отказов в Vissime
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Изоляция отказов
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
3.3.4.2. Изоляция отказов
После выявления отказов необходимо выполнить их изоляцию.
Для выявления отказов достаточно одного рассогласования. В нашем случае это рассогласования было получено с помощью формирователя рассогласования на основе наблюдателя состояния. Однако, для изоляции отказов одного рассогласования не достаточно.
Как было описано ранее, с помощью наблюдателей можно выявлять возникающие в системе отказы датчиков и исполнительных механизмов. Сформируем группу рассогласований для изоляции отказов датчиков.
Изоляция отказов датчиков
При условии, что в системе присутствуют только отказы датчиков, выход системы может быть задан следующим образом:
Если нам необходимо выявить только отказы датчиков, то выход системы может быть задан так:
y(s) = Gu(s)u(s) + fs(s), (3.57)
где Gu(s) определяется по (3. ), fs(s) - s-преобразование вектора отказов датчиков:
 . (3.58)
. (3.58)
Необходимо спроектировать совокупность сигналов рассогласования, которая позволяла бы изолировать отказы каждого датчика. Для этого, в соответствии с пунктом 2.3.6 можно использовать различные схемы изоляции отказов. Рассмотрим возможность использования схемы наблюдателей Франка. В соответствии с этой схемой, в данном случае, необходимо спроектировать два сигнала рассогласований каждое из которых будет нечувствительно только к одному из отказов датчиков ( отказу датчика уровня h2 или отказу датчика положения х).
Спроектируем сигнал рассогласования чувствительный к отказу первого датчика fs1(s) = [fs1(s); fs2(s)] и не чувствительный к отказу датчика положения fs2(s). Перепишем уравнение (4.69) так:
 , (3.59)
, (3.59)
где y1(s) = [y1(s); y2(s)], y2(s) = y3(s), fs2(s) = fs3(s).
Тогда генератор рассогласования примет следующий вид:
rs1(s) = [rs11(s); rs12(s)] = Hu1(s) u(s)+ Hy1(s)y1(s). (3.60)
При подстановке y1(s) в это уравнение получим:
rs1(s) = [Hu1(s) + Hy1(s)Gu(s)]u(s) + Hy1(s)fs1(s). (3.61)
Рассогласование будет чувствительно только к отказу fs1(s), когда матрицы передаточной функции генератора рассогласования будут удовлетворять следующим условиям:
 (3.62)
(3.62)
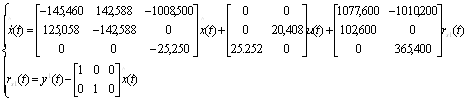
Для рассматриваемой системы (3.26) ![]() . При использовании наблюдателя состояния передаточная матрица(см. (3.60)):
. При использовании наблюдателя состояния передаточная матрица(см. (3.60)):
связывающая рассогласование и 1 и 2 выходы системы в соответствии с (3.63) так:
![]() , (3.64)
, (3.64)
где С1 – матрица С , из которой исключена 3 строка, Н1 – соответствующий вектор обратной связи наблюдателя состояния. Следовательно, передаточная матрица Hu1(s) будет иметь вид:
![]() . (3.65)
. (3.65)
При проектировании рассогласования таким образом может быть изолирован отказ первого датчика. Из этих формул видно, что для этого необходимо спроектировать наблюдатель состояния, запускаемый всеми входами системы и всеми, за исключением одного у3(t) выходами. Формирователь рассогласования, построенный на основе такого наблюдателя будет иметь вид:
 (3.66)
(3.66)
После расчета коэффициентов обратной связи наблюдателя Н1 из условия обеспечения его устойчивости получим следующий формирователь рассогласования:
 , (3.67)
, (3.67)
Аналогичным образом определяется формирователь рассогласования позволяющий изолировать отказ датчика положения:
 , (3.68)
, (3.68)
Таким образом, с помощью полученной совокупности рассогласований {rs1(t), rs3(t)} выполняется изоляция отказов датчиков: каждое рассогласование не чувствительно только к соответствующему отказу датчика т.е. оно близко к нулю при соответствующем отказе, и больше некоторого порогового значения при отказе другого датчика.
Следует отметить, что в данном случае формируются вектора рассогласования rs1(t)=[ rs11(t); rs12(t)] и rs3(t)=[ rs31(t); rs32(t)]. Для выполнения выявления отказов достаточно использовать по одному из элементов данных векторов. Выберем в качестве рассогласований:
rs1(t)=rs12(t)=y2(t)-![]() . (3.69)
. (3.69)
rs3(t)=rs31(t)=y1(t)-![]() . (3.70)
. (3.70)
Пороговые значения для рассогласований представлены в таблице 3.2. Схема изоляции отказов датчиков представлена на рисунке 3.17. Сигнатуры рассогласований при различных отказах датчиков приведены в таблице 3.3, реакции рассогласований на отказы датчиков изображены на рисунках 3.18, 3.19.
Таблица 3.2.
Пороговые значения рассогласований
| Ts1 | Ts3 |
| 3e-8 | 1.1e-8 |
Таблица 3.3.
Сигнатуры рассогласований
|
Отказ | rs1 | rs3 |
| fs1 – датчик уровня h2 | 0 | 1 |
| fs3 – датчик положения задвижки | 1 | 0 |
Значение «1» в таблице 3.3 означает превышение рассогласованием соответствующего порогового значения.
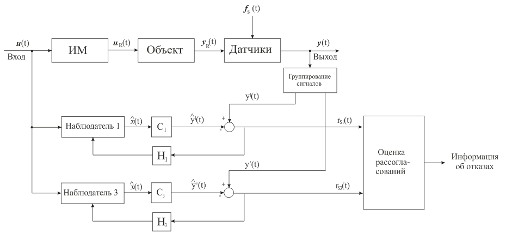
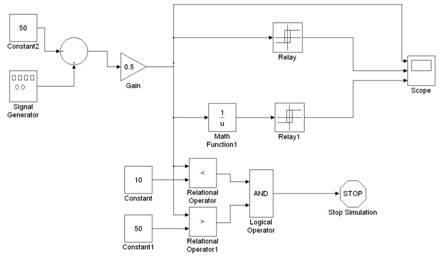
Рис. 3.17. Схема изоляции отказов датчиков
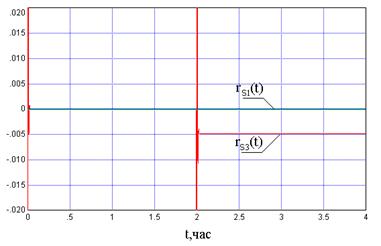
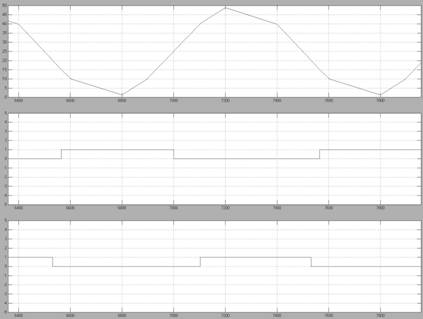
Рис. 3.18. Рассогласования при отказе датчика уровня h2
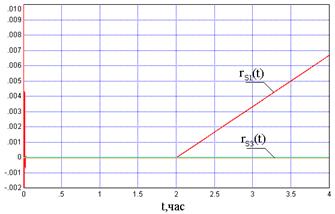
Рис. 3.19. Рассогласования при отказе датчика положения
Изоляция отказа исполнительного механизма
Для изоляции отказа исполнительного механизма будем использовать дополнительный наблюдатель состояния (рисунок 3.20). Спроектируем формирователь рассогласования. Представим описание модели исполнительного механизма (2.10) в переменных состояния:
 (3.71)
(3.71)
Наблюдатель состояния в этом случае будет иметь вид:
 (3.72)
(3.72)
а формирование рассогласования будет осуществляться следующим образом:
 (3.73)
(3.73)
Сигнал о положении задвижки получаем с помощью датчика положения, вероятность возникновения отказа fs3 в котором так же необходимо учитывать. Таким образом, в соответствии с формулами (2.41), (2.42), (2.44) рассогласование ra(t) будет реагировать на эти два отказа:
 . (3.74)
. (3.74)
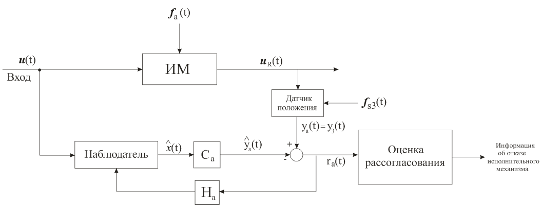
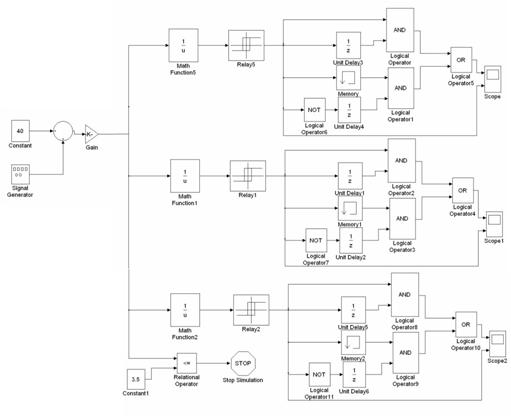
Рис. 3.20. Изоляция отказа исполнительного механизма
Пороговое значение для сигнала рассогласования Ta = 6e-17. При отказе исполнительного механизма или датчика положения это рассогласование будет превышать пороговое значение, сигнализируя об отказе. (см. рисунки 3.21, 3.22).
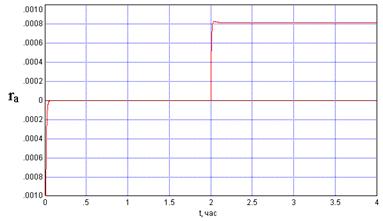
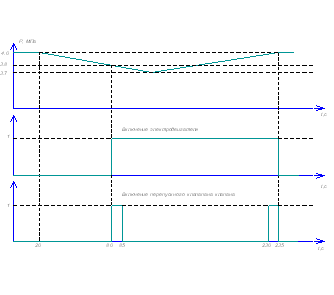
Рис. 3.21. Рассогласование ra(t) при отказе исполнительного механизма
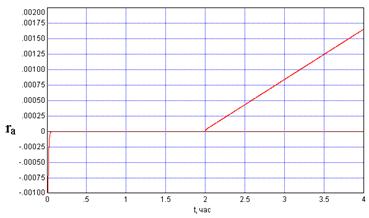
Рис. 3.22. Рассогласование ra(t) при отказе датчика положения
Изоляция отказов элементов системы
Таким образом, с помощью наблюдателей состояния мы получили шесть сигналов рассогласования: r1, r2, r3 – формирователь (3.67), rs1, rs2 - формирователи (3.78) и (3.79), ra – формирователь (3.83). Для построения системы диагностики, позволяющий изолировать все рассматриваемые отказы, необходимо рассматривать все эти рассогласования совместно. Как видно из рисунков (3.12)-(3.16) рассогласования r1, r2, r3 реагируют на все возможные отказы в системе, rs1, rs3 так же будут чувствительны ко всем отказам, а rа сформировано таким образом, чтобы реагировать только на отказ исполнительного механизма и датчика положения.
Реакции этих рассогласований на все рассматриваемые отказы представлены в таблице 3.4. В таблице значение «0» соответствует отсутствию реакции рассогласования на отказ, «1» - рассогласование чувствительно к отказу.
Таблица 3.4.
Сигнатуры рассогласований при различных отказах
| Отказы | fs1 | fs3 | fc1 | fc2 | fa |
| r1 | 1 | 1 | 1 | 1 | 1 |
| r2 | 1 | 1 | 1 | 1 | 1 |
| r3 | 0 | 1 | 0 | 0 | 1 |
| rs1 | 0 | 1 | 1 | 1 | 1 |
| rs3 | 1 | 0 | 1 | 1 | 1 |
| ra | 0 | 1 | 0 | 0 | 1 |
Из таблицы видно, что по сформированным рассогласованиям можно изолировать отказы исполнительного механизма, датчика уровня h2, датчика положения задвижки и отказы системы.
Однако реакция рассогласований на отказы объекта управления (утечка в баке и отказ задвижки) одинакова. С помощью полученных рассогласований изолировать эти отказы невозможно и для выполнения этой задачи необходимо использовать другую методику.
Изоляция отказов объекта управления
В соответствии с пунктом 2.5 для решения поставленной задачи будем использовать нейронную сеть.
Выберем двухслойную нейронную сеть с прямыми связями. Сеть будет иметь 3 входа(рассогласования r1, r2, r3) и 2 выхода. Функции активации нейронов сети установим логарифмическими сигмоидальными. Для обучения используем алгоритм с обратным распространением ошибки Левенберга-Маккварта.
Эта нейронная сеть будет классифицировать образцы рассогласований r1, r2, r3 в соответствии с типом отказа (утечка в баке или отказ задвижки).
Для обучения сети проводится ряд экспериментов: на модели имитаторе системы устанавливаются различные значения величин отказов δc1 и δc2 в диапазоне их изменения, получаемые при этом установившиеся значения рассогласований r1, r2, r3 запоминаются и затем используются в качестве образцов для обучения сети. Кроме того, обучение сети так же проводится на образцах, соответствующих безотказному режиму работы системы.
Построенная сеть имеет два выходных сигнала. Устанавливается, что выходные значения этих сигналов могут изменяться в пределах от 0 до 1. Значение близкое к «0» соответствует отсутствию отказа, значение «1» - отказу. Если на обоих выходах сети устанавливается значение близкое к нулю, то объект управления работает в безотказном режиме. При обучении сети использовалась таблица 3.5.
Таблица 3.5.
Обучение сети
| Отказы | выход 1 | выход 2 |
| утечка в баке 1, fc1 | 1 | 0 |
| отказ задвижки, fc2 | 0 | 1 |
На рисунке 3.23 представлены выходы нейронной сети при отказе в баке 1, рисунок 3.24 соответствует отказу задвижки.
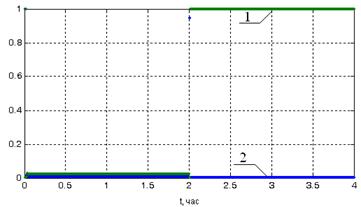
Рис. 3.23. Выходы нейронной сети при утечке в баке (внезапный отказ)
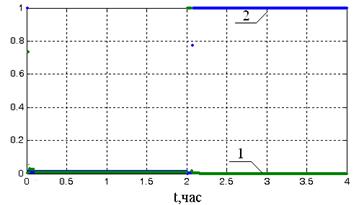
Рис. 3.24. Выходы нейронной сети при отказе задвижки (внезапный отказ)
Таким образом, нейронная сеть позволяет изолировать внезапные отказы. При этом задержки при выявлении почти не наблюдается. Реакции сети на зарождающиеся отказы объекта управления (3.23) и (3.25) изображены на рисунках 3.25, 3.26.
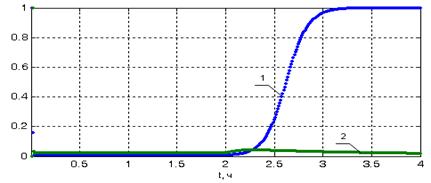
Рис. 3.25. Выходы нейронной сети при утечке в баке (зарождающийся отказ)
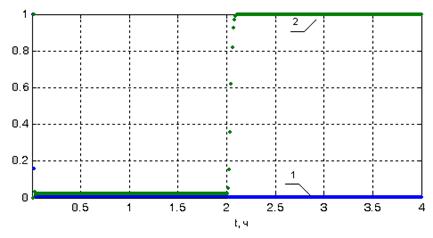
Рис. 3.26. Выходы нейронной сети при утечке в баке (зарождающийся отказ)
Как видно из рисунков изоляция зарождающихся отказов с помощью нейронной сети выполняется со значительной задержкой. Это связано с тем, что обучение сети выполнялось на установившихся значениях рассогласований при различных величинах отказов
Похожие работы
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев