Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
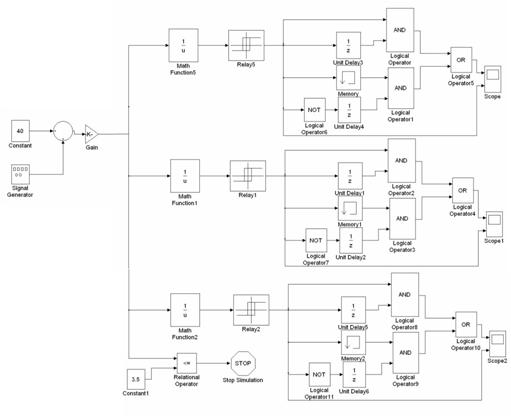
Проектирование системы диагностики отказов
Моделирование отказов в Vissime
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Моделирование датчиков
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
3.2.3. Моделирование датчиков
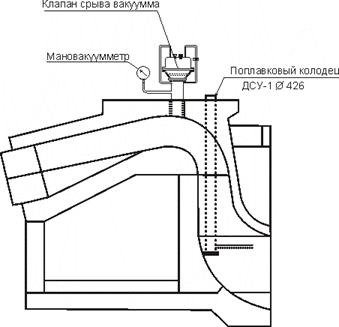
Для измерения уровня жидкости в баке 2 используется датчик уровня. По причине того, что при его моделировании не будем учитывать динамические свойства датчика, его модель может быть описана в качестве передаточной функции вида:
Ws2(s) = 1. (3.12)
Для измерения положения задвижки так же используем датчик. Он описывается так же передаточной функцией вида:
Wsх(s) = 1. (3.13)
В соответствии с техническим заданием, уровень жидкости в первом баке датчиком не измеряется. Однако, в дальнейших исследованиях необходима информация об этом сигнале. Поэтому, для восстановления этой не измеряемой величины будем использовать виртуальный датчик – наблюдатель состояния.
Спроектируем наблюдатель состояния для системы двух баков. Для этого воспользуемся описанием системы баков в переменных состояния (3.9). Для линейной динамической модели:
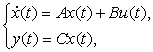 (3.14)
(3.14)
где ![]() ,
, ![]() ,
, ![]() для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния:
для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния:
![]() . (3.15)
. (3.15)
Система (3.9) является нелинейной, поэтому для оценки ее состояния можно построить нелинейный наблюдатель следующего вида:
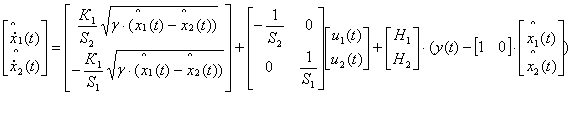 . (3.16)
. (3.16)
Для выбора коэффициентов обратной связи наблюдателя H необходимо выполнить линеаризацию в некоторой рабочей точке. Например, для точки
h1-h2 = 0.16357,м линеаризованная модель для (3.9) будет иметь следующий вид:
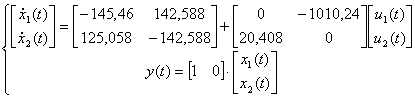 . (3.17)
. (3.17)
Коэффициенты матрицы Н выберем исходя из условия обеспечения устойчивости наблюдателя и с учетом, того, что наблюдатель должен обладать более высоким быстродействием, чем система.
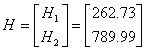 .
.
2.одель регулятора
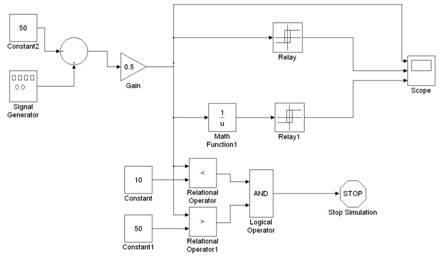
3.2.5. Моделирование отказов
1. Отказ исполнительного механизма
Данный отказ будем моделировать как внезапное изменение коэффициента усиления исполнительного механизма в соответствии с уравнением:
КИМ = (1+δИМ)КИМ0, (3.20)
где δИМ - величина отказа, изменяемая в пределах {-1…1}. δИМ = 0 соответствует безотказному режиму работы.
2. Отказы датчиков
Данный тип отказов проявляется во внезапном возникновении отклонений показаний датчика от действительных значений, измеряемой величины. Моделирование осуществляется в соответствии с уравнением:
![]() , (3.21)
, (3.21)
где yR– действительное значение измеряемой величины, y – значение величины, полученное датчиком, δS- величина отказа датчика.
Будем рассматривать следующие отказы датчиков: - датчик уровня, измеряющий h2; - датчик положения задвижки.
Величины отказов датчиков определяются следующим образом:
δS1 = {-1…1}, (3.22)
δS3 = α∙t. (3.23)
3. Отказы объекта управления
Будем рассматривать следующие отказы объекта управления:
1) отверстие в баке 1
Отказ моделируется как дополнительный расход, за счет которого уменьшается уровень в баке 1 в соответствии с уравнениями:
![]() ,
, ![]() (3.24)
(3.24)
где Kfmax=0.5 м3/час – максимально возможный поток через отверстие.
Данный отказ может быть рассмотрен как внезапный и зарождающийся. В первом случае величина отказа dО1 измеряется в пределах {0…1}. dО1 = 0 соответствует безотказному режиму работы, dО1 = 1 – максимальной величине отверстия. Во втором случае величина отказа изменяется со скоростью αО1:
dО1 = αО1∙t. (3.25)
2) отказ задвижки
Отказ моделируется как дополнительный поток через задвижку в соответствии с уравнением:
![]() ,
, ![]() (3.26)
(3.26)
где Kfmax=1 м3/час – максимально возможный поток задвижку, dОУ2 = {0…1} - величина отказа.
Данный отказ так же может быть рассмотрен как внезапный и зарождающийся. При внезапном отказе величина dО2 измеряется в пределах {0…1}. dО2 = 0 соответствует безотказному режиму работы, dО2 = 1 соответствует максимальному потоку через задвижку в закрытом положении. При зарождающемся отказе:
dО2 = αО2∙t. (3.27)
Похожие работы
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев