Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
Проектирование системы диагностики отказов
Моделирование отказов в Vissime
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Моделирование отказов в Vissime
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
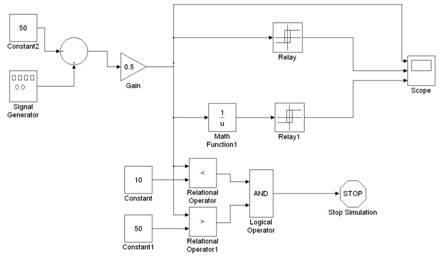
3.3.2. Моделирование отказов в Vissime
При моделировании в качестве имитатора реальной системы будем использовать ее нелинейную модель с дополнительно введенными в нее отказами датчиков, исполнительного механизма и объекта управления. Данная модель, созданная в Vissim 5.0 представлена в приложении В.
При моделировании устанавливаются следующие значения вектора входа и начальные значения состояния (3.26):
![]() ,
,  .
.
Моделирование проводим на временном интервале соответствующем 4 часам.
Рассмотренные типы отказов вводятся в систему по отдельности в момент времени t=2 часа:
1. Отказ датчика уровня h2 : y1(t)=(1-0.2) ∙yR1(t), t>2 часов.
2. Отказ датчика положения х: y3(t)=[1+0.2∙sin(10(t-2))]∙yR3(t), t>2 часов.
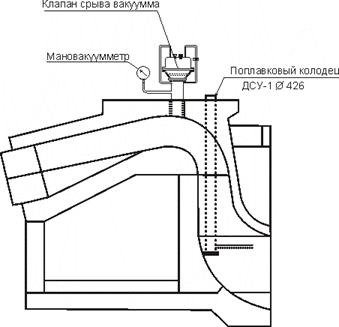
3. Утечка в баке 1:
![]() ,
, ![]() ,t>2 часов.
,t>2 часов.
![]() ,
, ![]() ,t>2 часов.
,t>2 часов.
4. Отказ задвижки:
![]() ,
, ![]() , t>2 часов.
, t>2 часов.
![]() ,
, ![]() , t>2 часов.
, t>2 часов.
5. Отказ исполнительного механизма: uR1(t)=(1+0.2) ∙u1(t), t>2 часов.
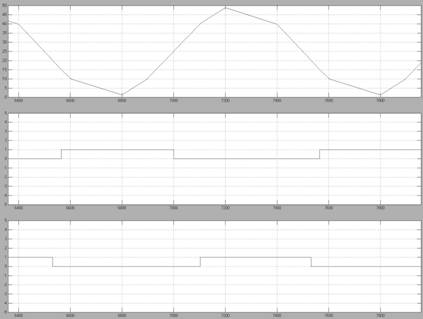
Результаты моделирования отказов представлены на рисунках (3.4) – (3.12).
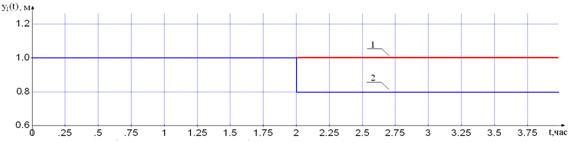
Рис. 3.4. Сигнал y1(t): 1- без отказа, 2 - при отказе датчика уровня h2.

Рис. 3.5. Сигнал y3(t): 1- без отказа, 2 - при отказе датчика положения х.
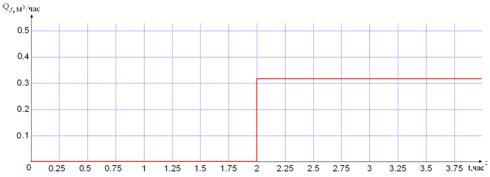
Рис. 3.6. Дополнительный поток Qf1(t) – утечка в баке 1 (внезапный отказ)
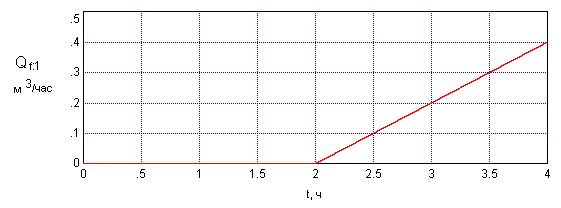
Рис. 3.7. Дополнительный поток Qf1(t) – утечка в баке 1 (зарождающийся отказ)
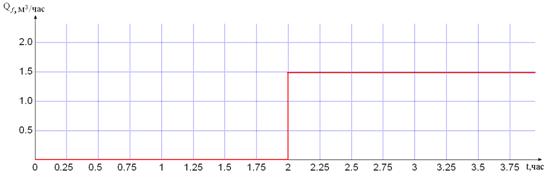
Рис. 3.8. Дополнительный поток Qf2(t), обусловленный отказом задвижки (внезапный отказ)
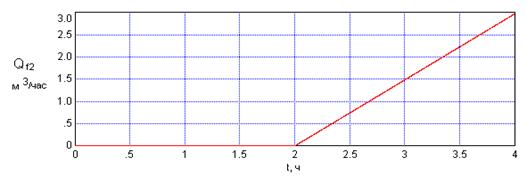
Рис. 3.9. Дополнительный поток Qf2(t), обусловленный отказом задвижки
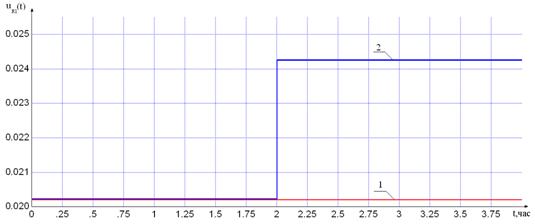
Рис. 3.10. Сигнал uR(t): 1 – без отказа, 2 – при отказе исполнительного механизма
3.3.3. Диагностика отказов с помощью наблюдателей состояния
Для решения задачи диагностики с помощью данных наблюдателей будем использовать описание системы с отказами в форме (3.39).
3.3.3.1. Выявление отказов
Для решения задачи выявления отказов выполним формирование рассогласования. Формирование рассогласования будем осуществлять с помощью наблюдателей состояния (см. пункт 2.3.8).
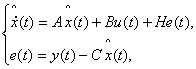
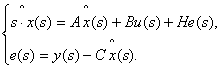
Структура формирователя рассогласования ( рисунок 2.11) математически описывается формулой (2.11):
![]() .
.
Спроектируем формирователь рассогласования.
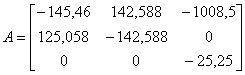
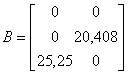
Чтобы определить структуру наблюдателя, рассмотрим исследуемую систему в форме (3.26) без отказов f(t)=0.
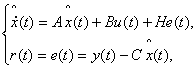
Для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния, описываемый следующим образом:
 (3.44)
(3.44)
где ![]() ,
, ![]() , матрицы А,В,С равны матрицам системы (3.26).
, матрицы А,В,С равны матрицам системы (3.26).
При проектировании данного наблюдателя выберем параметры матрицы Н из условия обеспечения его устойчивости. Кроме того, при выборе Н учтем, что наблюдатель должен обладать большим быстродействием чем система, переменные состояния которой он восстанавливает. Выберем следующую матрицу Н:
 .
.
В качестве рассогласования (пункт 2.3.8) можно использовать взвешенную величину ошибки оценки входа (We(t)). Пусть матрица весовых коэффициентов рассогласования равна W=I, тогда получим следующий формирователь рассогласования r(t):
 (3.45)
(3.45)
где, ![]() ,
,  ,
,  ,
,  .
.
Определим требуемые передаточные функции Hu(s) и Hy(s).
Применим преобразование Лапласа к (3.56), полагая при этом, что x(s)|s=0 = 0:
 (3.46)
(3.46)
Подставив уравнение ошибки e(s) в уравнение состояния (3.58) получим:
![]() . (3.47)
. (3.47)
С учетом формулы (3.43) и того, что r(s)=We(s) получим:
 . (3.48)
. (3.48)
Передаточная матрица Hy(s) имеет следующий вид:
 , (3.49)
, (3.49)
где ![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Передаточная матрица Hu(s) может быть получена следующим образом:
![]() , (3.50)
, (3.50)
![]() (3.51)
(3.51)
Проверим, выявляемы ли все рассматриваемые отказы.
Выявляемость отказов
Зная структуру формирователя рассогласования на основе наблюдателя состояния, проверим условие выявляемости отказов вектора f(t).
Реакция вектора рассогласования на возникающий отказ определяется по формуле (2.15). В данном случае:
![]() . (3.52)
. (3.52)
Для того, чтобы выявить i-ый отказ fi в рассогласовании r(s), i-ая колонка ![]() передаточной матрицы
передаточной матрицы ![]() должна быть не равна нулю
должна быть не равна нулю ![]() ≠ 0.
≠ 0.
Очевидно, что передаточная матрица ![]() не содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков, исполнительного механизма и объекта управления выявляем в рассогласовании r(t).
не содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков, исполнительного механизма и объекта управления выявляем в рассогласовании r(t).
Кроме того, для всех отказов так же выполняется и строгое условие выявляемости:
![]() ≠ 0, i=1…4, (3.53)
≠ 0, i=1…4, (3.53)
так как 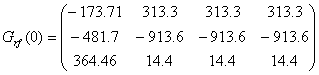 не содержит нулевых столбцов.
не содержит нулевых столбцов.
Таким образом, для выявления всех рассматриваемых отказов достаточно построить формирователь рассогласования с рассмотренной выше структурой (3.57). При воздействии на систему (3.26) любого из отказов вектора f(t) рассогласование r(t)= e(t) будет иметь следующий вид:
![]() , (3.54)
, (3.54)
где ошибка оценки состояния изменяется в соответствии с формулой:
![]() . (3.55)
. (3.55)
Таким образом, ошибка оценки e(t) будет равна нулю только при отсутствии отказов.
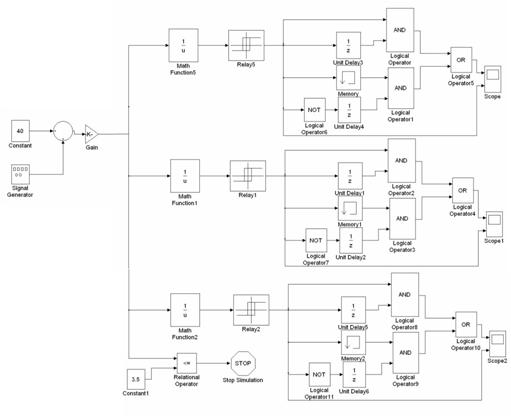
Полученный формирователь рассогласования изображен на рисунке 3.11.
Выявление сигналов отказов выполним сравнением сигнала рассогласования с фиксированным порогом, устанавливаемым при отсутствии отказов:
![]() ,
, ![]() . (3.56)
. (3.56)
Пороговые значения для рассогласования, представлены в таблице 3.1.
Таблица 3.1.
Пороговые значения выявления отказов
| T1 | T2 | T3 |
| 2e-7 | 1e-8 | 1e-16 |
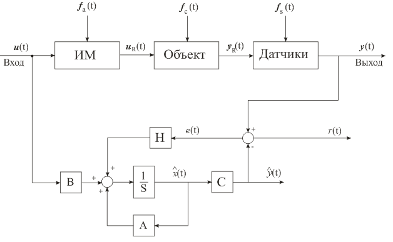
Рис. 3.11. Выявление отказов с помощью наблюдателя состояния
Моделирование
Моделирование выполняем для рассмотренных в 3.3.2 отказов. Начальные условия для формирователя рассогласования (3.57) установим равными:
 .
.
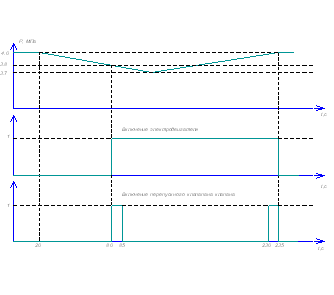
Реакции рассогласования r(t) на соответствующие отказы изображена на рисунках (3.12) – (3.16).
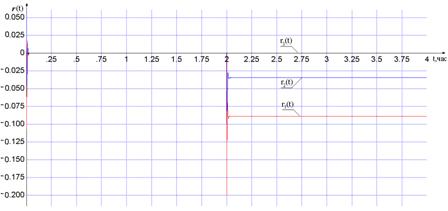
Рис.3.12. Рассогласования при отказе датчика уровня h2
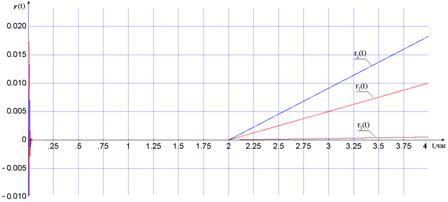
Рис.3.13. Рассогласования при отказе датчика положения х

Рис.3.14. Рассогласования при утечке в баке 1
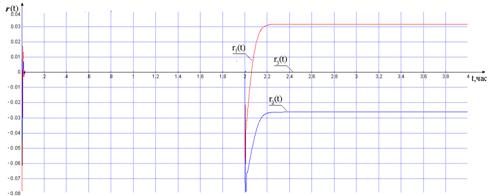
Рис. 3.15. Рассогласования при отказе задвижки
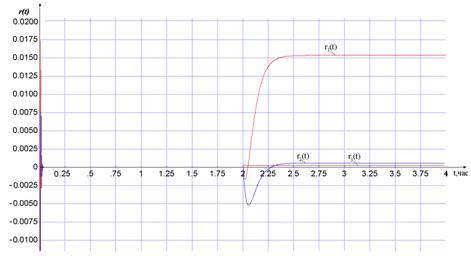
Рис.3.16. Рассогласования при отказе исполнительного механизма
Как видно из рисунков, рассогласования при отсутствии отказов близки к нулю, а при возникновении любого из отказов значительно увеличиваются. Таким образом, выполняется выявление отказов с помощью наблюдателя состояния. Из рисунков так же видно, что выявление отказов с помощью наблюдателей происходит практически без временной задержки, что является существенным преимуществом их использования.
Похожие работы
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев