Обзор литературы и постановка задачи
Описание метода диагностики отказов
Основные принципы диагностики отказов, основанной на использовании моделей
Моделирование систем с отказами
Общая структура формирования рассогласования в диагностике отказов, основанной на моделях
Выявляемость отказов
Фиксирование направления вектора рассогласования
Техники формирования рассогласования
Формирование рассогласований, не чувствительных к возмущениям и ошибкам линеаризации
Проектирование наблюдателей при неизвестном входе
Проверяем условие равенства рангов для Е и СЕ: если ранг(СЕ)≠ранг(Е) наблюдатель не существует, переходим к пункту 10
Схемы надежной изоляции отказов датчиков
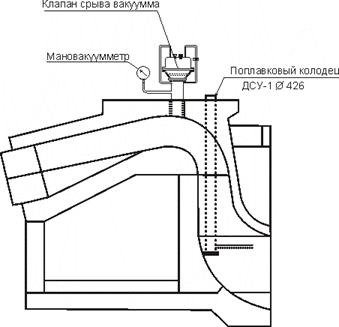
Диагностика отказов системы регулирования уровня жидкости в баке
Моделирование датчиков
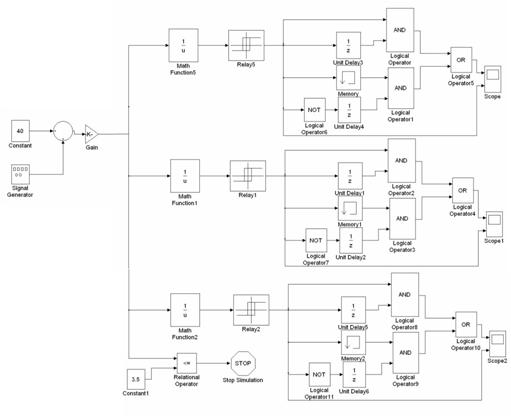
Проектирование системы диагностики отказов
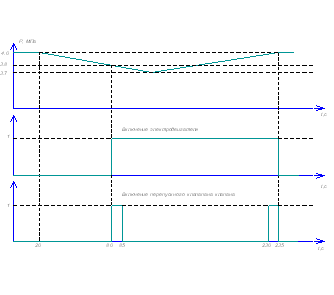
Моделирование отказов в Vissime
Изоляция отказов
Диагностика отказов с помощью наблюдателей при неизвестном входе
Основные выводы и результаты
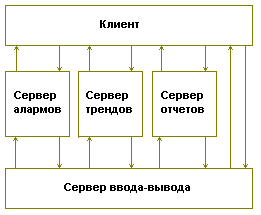
Требования к ПЭВМ
Требования к помещениям для работы с ПЭВМ
Пожарная безопасность
Расчет параметров событий сетевого графика
Расчет параметров работ сетевого графика
Расчет стоимостных параметров сетевого графика
Навигация
Техники формирования рассогласования
Диагностика отказов системы регулирования уровня в баке
135054
знака
16
таблиц
63
изображения
2.3.7 Техники формирования рассогласования
Центральной проблемой при диагностике отказов с использованием моделей является формирование сигналов рассогласования. Существует большое количество методов формирования рассогласования. Рассмотрим подробнее более распространенные. Большинство методов могут применяться как к непрерывным, так и к дискретным моделям, тем не менее некоторые методы могут применяться только к дискретным моделям.
2.3.7.1. Методы, основанные на использовании наблюдателей
Основная идея данной группы методов формирования рассогласования состоит в оценке выходов системы по измерениям с использованием наблюдателей Люненбергера в детерминированной среде или фильтров Калмана в стохастической среде. Затем в качестве рассогласования используется (взвешенная) ошибка оценки выхода или порожденная случайная величина в стохастическом случае. Данный метод будет рассмотрен подробнее применительно к наблюдателям состояния и наблюдателям при неизвестном входе далее в пункте 2.11.
2.3.7.2. Методы, основанные на оценке параметров
Диагностика отказов с использованием моделей может быть так же выполнена с использованием техник идентификации. Этот метод основан на предположении о том, что отказы являются отражением физических параметров системы таких как сила трения, масса, внутреннее трение, сопротивление, индуктивность, емкость и т.д. основная идея метода выявления отказов заключается в том, что параметры реального процесса оцениваются on-line с использованием широко известных методов оценки параметров. Результаты оценки сравниваются с параметрами эталонной модели, определенной при отсутствии отказов. Любое значительное отличие означает отказ. В этом методе обычно используется математическая модель вход-выход системы в следующей форме:
y(t) = f(P, u(t)), (2.33)
где P – вектор коэффициентов модели, непосредственное связанный с физическими параметрами системы. Функция f может быть как линейной так и нелинейной.
Основные этапы диагностика отказов, основанной на оценке параметров таковы:
установить модель процесса с использованием физических отношений;
определить взаимосвязи между коэффициентами модели и физическими параметрами процесса;
оценить нормальные коэффициенты модели;
вычислить нормальные физические параметры процесса;
определить изменения параметров для различных отказов.
При завершении последнего шага может быть построена база данных отказов и их признаков (симптомов). Во время работы системы периодически необходимо выполнять идентификацию коэффициентов модели системы по измеряемым входам и выходам и сравнивать с нормальными параметрами модели и параметрами с отказами.
Чтобы выполнить генерацию рассогласования в соответствии с этим методом, должен быть использован on-line алгоритм идентификации параметров. Если мы имеем оценку параметров модели на k-1 шаге P’k-1, рассогласование можно определить следующим образом:
![]() (2.34)
(2.34)
где Р0 – коэффициенты нормальной модели.
Выполнить изоляцию отказов с помощью оценки параметров достаточно трудно. Причиной этого является то, что идентифицированные параметры являются параметрами модели, которые не всегда могут быть преобразованы в физические параметры системы. Тем не менее, отказы представляются вариациями физических параметров.
2.3.8. Формирование рассогласований на основе наблюдателей состояния
Чтобы определить структуру наблюдателя, рассмотрим стационарную линейную динамическую модель исследуемого процесса:
 (2.35)
(2.35)
где ![]() ,
, ![]() ,
, ![]() .
.
При предположении, что все матрицы А, В и С точно известны, для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния:
 (2.36)
(2.36)
Схема наблюдателя, описываемого уравнением 2.36 изображена на рисунке 2.16.
Из уравнения 2.36 следует, что оценка ошибки состояния eх(t):
 (2.37)
(2.37)
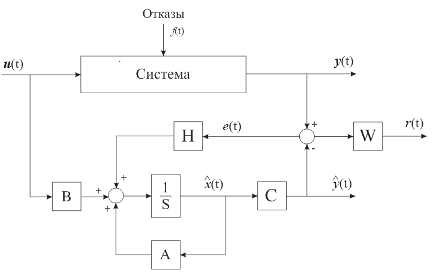
Рис. 2.16. Система и наблюдатель состояния
Ошибка оценки состояния eх(t) (и ошибка e(t)) асимптотически уменьшается:
![]() (2.38)
(2.38)
если наблюдатель устойчив. Обеспечение устойчивости наблюдателя достигается выбором матрицы обратной связи Н.
Система, на которую воздействуют отказы, как было показано ранее (пункт 2.4.), описывается следующим образом:
 (2.39)
(2.39)
Здесь f(t) – сигналы отказа на входе и выходе, действующие через матрицы ![]() и
и ![]() соответственно. Они могут представлять аддитивные отказы исполнительного механизма, процесса, входных и выходных датчиков.
соответственно. Они могут представлять аддитивные отказы исполнительного механизма, процесса, входных и выходных датчиков.
Для ошибки оценки состояния выполняются следующие уравнения:
![]() , (2.40)
, (2.40)
тогда выходная ошибка примет вид:
![]() . (2.41)
. (2.41)
Вектор f (t), в этом случае, представляет аддитивные отказы, так как они добавляются к e(t) и x(t).
Как видно из уравнения (2.40), при соответствующем выборе параметров матрицы обратной связи наблюдателя Н ошибка оценки состояния при отсутствии отказов асимптотически уменьшается (см. 2.39), а в случае появления внезапных или зарождающихся сигналов отказов f(t) ошибка оценки состояния будет отличаться от нуля. Ошибка оценки выхода e(t), определяемая по формуле (2.41) при возникновении отказов так же будет отлична от нуля.
Ошибки ![]() и
и ![]() могут быть использованы как рассогласования. В частности, рассогласование
могут быть использованы как рассогласования. В частности, рассогласование ![]() является основой различных методов обнаружения отказов, использующих оценку выхода.
является основой различных методов обнаружения отказов, использующих оценку выхода.
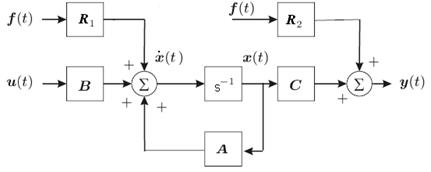
Рис. 2.17. Система с отказами
Если входные и выходные сигналы системы так же подвержены воздействию шума, то вместо классических наблюдателей используются фильтры Калмана.
Если отказы рассматриваются как изменения параметров ![]() или
или ![]() , то поведение системы становится:
, то поведение системы становится:
![]() (2.42)
(2.42)
а ошибки ![]() и
и ![]() :
:
 (2.43)
(2.43)
Изменения параметров ![]() и
и ![]() представляют собой мультипликативные отказы.
представляют собой мультипликативные отказы.
В этом случае, изменения в рассогласованиях зависят от изменений параметров, так же как и изменения входа и переменных состояния. Следовательно, влияние изменения параметров на рассогласование не такое простое, как в случае аддитивных отказов f(t).
Наблюдатели состояния могут быть использованы для изоляции отказов, при проектировании групп рассогласований или направлений вектора рассогласований. Для отказов датчиков, спроектировать группу рассогласований очень просто. Если нам необходимо сформировать рассогласование чувствительное ко всем отказам датчиков за исключением одного, то наблюдатель формирующий это рассогласование должен возбуждаться всеми выходами за исключением одного. Однако, проектировать группы рассогласований для изоляции отказов исполнительных механизмов труднее. Эта проблема может быть решена с помощью наблюдателей при неизвестном входе и метода распределения собственных чисел. Тем не менее, изоляция отказов исполнительных механизмов не всегда возможна и в этом случае. Фиксирование направления вектора рассогласования может быть выполнено с использованием фильтров выявления отказов.
Похожие работы
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... его инфраструктуры, а также выполнения международных обязательств по поставкам газа. 1.3 Роль договора в регулировании отношений по поставкам газа Определяя газоснабжение одной из форм энергоснабжения, законодатель ставит перед юристами-практиками трудноразрешимую задачу об определении правовой природы соответствующего договора, поскольку далее указывает, что газоснабжение представляет ...
... изолировать себя от земли (стоять на сухих досках, деревянной лестнице и т.д.). Билет № 4. ИТР ответственные за безопасную эксплуатацию ТПУ и ТС 1. Требования к персоналу. Обучение и работа с персоналом Лица, принимаемые на работу по обслуживанию теплопотребляющих установок и тепловых сетей, должны пройти предварительный медицинский осмотр и в дальнейшем проходить его периодически в ...
0 комментариев