Анализ исходных данных
Технологичность базирования и закрепления
Выбор метода получения заготовки
Выбор маршрутов обработки поверхностей
Разработка технологического маршрута и схем базирования
Выбор средств технологического оснащения
Разработка технологических операций
Переход
Расчёт усилия зажима
Расчет зажимного механизма патрона
Описание работы кулачкового самоцентрирующего патрона
Патентные исследования
Безопасность и экологичность проекта
Опасные вредные производственные факторы (ОВПФ) рассматриваемого производственного объекта
Наличие вибраций и шума
Организационные, технические мероприятия по созданию безопасных условий труда
Расчет механической вентиляции
Определение категории помещения по пожаро- и взрывоопасности
Возможность акустического загрязнения окружающей среды
Проектирование участка
Исходные данные для экономического обоснования сравниваемых вариантов
Расчет капитальных вложений (инвестиций) по сравниваемым вариантам
Расчет технологической себестоимости изменяющихся по вариантам операций
Калькуляция себестоимости обработки детали по вариантам технологического процесса
Расчет приведенных затрат и выбор оптимального варианта
Интегральный экономический эффект
Навигация
Расчет зажимного механизма патрона
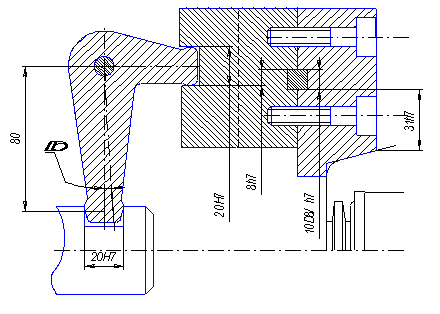
Технологический процесс изготовления корпуса приспособления для крепления оправок с хвостовиком HSK-63
139381
знак
22
таблицы
14
изображений
8.3 Расчет зажимного механизма патрона
Приступая к расчету зажимного механизма необходимо определиться с его конструкцией. В самоцентрирующих механизмах установочные элементы (в данном случае кулачки) должны быть подвижными в направлении зажима и закон их относительного движения необходимо выдержать с высокой точностью. Поэтому на движение кулачков накладываются условия: разнонаправленность, одновременность и равная скорость движения. Данное условие можно выдержать, обеспечивая движение трех кулачков от одного источника движения (силового привода).
В кулачковых патронах наибольшее применение получили рычажные и клиновые зажимные механизмы, движение которым передается центральной втулкой связанной с силовым приводом.
Рычажный механизм представляет собой неравноплечий угловой рычаг, смонтированный в корпусе патрона на неподвижных осях и который своими сферическими концами входит с посадкой в пазы постоянного кулачка и центральной втулки.
Клиновой зажимной механизм по конструкции проще рычажного и формируется втулкой и постоянным кулачком. Для этого во втулке выполнены наклонные под углом α Т-образные пазы, в которые входят своими Т-образными выступами постоянные кулачки. При перемещении втулки от силового привода кулачок перемещается в радиальном направлении в направляющих корпуса патрона. К постоянным кулачкам жестко крепятся сменные кулачки.
При расчете зажимного механизма определяется усилие Q, создаваемое силовым приводом, которое зажимным механизмом увеличивается и передается постоянному кулачку:
![]()
где ic – передаточное отношение по силе зажимного механизма (выигрыш в силе).
Данное отношение для рычажного механизма равно:
iс.р.м. = А/Б,
где А и Б – плечи рычага.
Клиновой зажимной механизм рекомендуется применять в патронах, наружный диаметр которых менее 200мм, при больших диаметрах предпочтение отдается рычажному зажимному механизму.
На этапе расчета наружный диаметр патрона можно определить по формуле:
Дп @ d2+2Hк,
где Нк – длина постоянного кулачка.
Дп @ 100+2*80 = 260 мм.
Принимаем рычажный зажимной механизм с ic = 2.
![]()
8.4 Расчет силового привода
Для создания исходного усилия Q используется силовой привод, устанавливаемый на задний конец шпинделя. В его конструкции можно выделить силовую часть, вращающуюся совместно со шпинделем и муфту для подвода рабочей среды. В качестве приводов наибольшее применение получили пневматический и гидравлический вращающиеся цилиндры.
В данной работе вначале следует попытаться применить пневматический привод, так как в любом производстве имеются трубопроводы для подачи сжатого воздуха. Диаметр поршня пневмоцилиндра определяется по формуле [7]:
![]()
где Р – избыточное давление воздуха, принимаемое в расчетах равным 0,4 МПа.
В конструкции станка 16К20Ф3 можно встроить силовой привод с диаметром поршня не более 120мм, Если при расчете по вше указанной формуле диаметр поршня получится более 120мм, то следует применять гидравлический привод, где за счет регулирования давления масла можно получить большие исходные усилия. При заданном усилии Q подбираем давление масла (Рг = 1,0; 2,5; 5,0; 7,5 МПа), чтобы диаметр поршня не превышал 120мм.
Ход поршня цилиндра рассчитывается по формуле:
SQ = SW / Iп,
где SW – свободный ход кулачков, который можно принять равным 5мм;
iп = 1/ic – передаточное отношение зажимного механизма по перемещению. Значение SQпринимать с запасом 10…15мм.
В данном расчете имеем:
![]() – для пневмопривода
– для пневмопривода
![]() – для гидропривода.
– для гидропривода.
Принимаем гидравлический привод с D = 100мм, а SQ= 20мм.
8.5 Расчет погрешности установки заготовки в приспособлении
Данный раздел выполняется после разработки конструкции патрона и простановки размеров. Погрешность установки определяется по формуле:
![]()
где εб – погрешность базирования, равная при данной схеме нулю, так как измерительная база используется в качестве технологической.
εз – погрешность закрепления – это смещение измерительной базы под действием сил зажима (в данном расчете можно принять εз @ 0).
εпр – погрешность элементов приспособления, зависящая от точности их изготовления.
Используя размерную схему патрона с рычажным зажимным механизмом, найдём:
![]()
где ωАΔ – колебания замыкающего размера АΔ.
Δ1 и Δ3 – погрешности, возникающие вследствие неточности изготовления размеров А1 и А3 (Δ1 = ТА1, Δ3 = ТА3);
Δ2, Δ4 и Δ6 – погрешности из-за колебания зазоров в сопряжениях (Δ2, Δ4 и Δ6 = Sнб- Sнм);
Δ5 – погрешность, появляющаяся из-за неточности изготовления плеч рычага, равная
Δ5 = AsinΔβ (Δβ задавать 30, 20, 10).
Погрешность установки не должна превышать величин:
для черновой обработки – εудоп = zminчист (zminчист – минимальный припуск на чистовую обработку); εудоп = 0,25 мм.
Δ1 =0,025 мм. Δ2 = (0,062 + 0,015) – (0,40 – 0) = 0,037 мм. Δ3 = 0,015 мм.
Δ4 = (21 + 21) – (0) = 0,042 мм. Δ5 = 80*sin0,167 = 0,233 мм. Δ6 = 0,042 мм.
![]()
εудоп = 0,25 мм < εу = 0,13 мм, следовательно патрон разработан верно и может использоваться на 05-й токарной (черновой) операции.
0 комментариев