Описание объекта управления
Математическое ожидание случайного процесса
Идентификация объекта управления по временным трендам
Основные задачи идентификации
Расчет характеристик математической модели объекта управления
Структурированные модели
Дискретные модели
Выбор и описание закона регулирования
Нелинейные или позиционные регуляторы
Навигация
Основные задачи идентификации
Разработка системы регулирования температуры смазочного масла турбины
62018
знаков
0
таблиц
34
изображения
3.2 Основные задачи идентификации
Рассмотрим различные постановки задачи идентификации. Как уже отмечалось выше, в общем виде задача идентификации заключается в определении оператора объекта, преобразующего входные воздействия в выходные. В связи с этим выделят задачи структурной и параметрической идентификации.
При структурной идентификации определяют структуру и вид оператора объекта, или другими словами вид математической модели объекта.
После того как математическая модель объекта определена, проводят параметрическую идентификацию, заключающуюся в определении числовых параметров математической модели.
Задачей структурной идентификации является представление реального объекта управления в виде математической модели. Конкретный выбор математической модели зависит от типа объекта.
Для описания больших систем и объектов, таких как социальные, производственные, финансово-экономические, используются семиотические (знаковые) и лингвистические модели, базирующиеся на теории множеств и абстрактной алгебры.
В качестве математических моделей технических систем применяются дифференциальные уравнения в обыкновенных и частных производных. Причем при решении задач управления предпочтение отдается моделям в пространстве состояний и структурированным моделям, описываемым дифференциальными уравнениями в обыкновенных производных.
Задачу параметрической идентификации можно сформулировать следующим образом [29]. Пусть имеется полностью наблюдаемый и полностью управляемый объект, задаваемый уравнениями состояния
 , (3.6)
, (3.6)
где B - n-мерный вектор –столбец, а C - n-мерный вектор –строка, А – квадратная матрица размером ![]() . Элементы этих векторов А В и С неизвестные числа. Целью идентификации является определение этих чисел.
. Элементы этих векторов А В и С неизвестные числа. Целью идентификации является определение этих чисел.
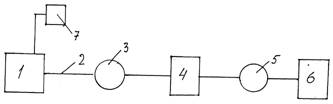
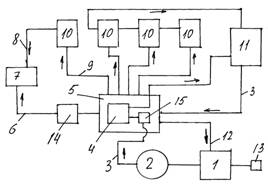
Под идентификацией в дальнейшем будем понимать нахождение параметров моделей объектов, предполагая, что уравнения моделей заранее известны и задаются с помощью обобщенной структурной схемы объекта (рис. 3.2), т.е. будем рассматривать вопросы параметрической идентификации.
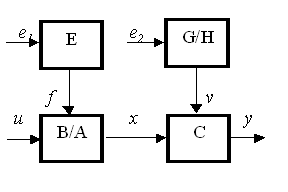
Рис. 3.2
На схеме приняты следующие обозначения:
u и y – наблюдаемые входной и выходной сигналы;
x – ненаблюдаемая (скрытая) переменная, оцениваемая косвенно по сигналам u и y , получаемым в результате преобразования в системе операторами А В и H;
е1 и е2 – ненаблюдаемые помехи (случайные процессы типа белого шума);
f и v – ненаблюдаемые помехи (коррелированные во времени случайные сигналы, в некоторых случаях содержащие детерминированные составляющие);
A, B, C, E, G, H – операторы, вид которых известен, но неизвестны параметры.
Основными постановками задач идентификации являются:
– идентификация, или определение характеристик объекта (по значениям u и y определить операторы А, В иC);
– генерация случайных сигналов с заданными характеристиками, или определение характеристик сигналов (по значениям f или v определить оператор E или G, H);
– наблюдение за скрытыми переменными, или определение переменных состояния (по наблюдаемым u и y, известным операторам A, B, C, E, G, H определить x).
Решение вышеназванных задач идентификации осуществляется методами параметрической и непараметрической идентификации. При использовании методов параметрической идентификации сразу определяются коэффициенты передаточной функции или уравнения объекта. Вторая группа методов используется для определения временных или частотных характеристик объектов, а также характеристик случайных процессов генерируемых объектами. По полученным характеристикам затем определяются передаточная функция или уравнения объекта. В настоящее время более широкое распространение получили методы параметрической идентификации.
3.3 Метод наименьших квадратов
Параметрическая идентификация моделей объектов позволяет сразу находить значения коэффициентов модели объекта по измеряемым значениям управляемого y и управляющего u сигналов объекта. При этом предполагается, что структура и порядок модели объекта уже известен. Измеряемые значения y и u представляются в виде временного ряда, поэтому в результате идентификации оцениваются параметры АРСС – модели объекта, или параметры его дискретной передаточной функции. Зная коэффициенты АРСС – модели и ее структуру можно перейти к непрерывным структурированным моделям и моделям в пространстве состояний, как это делалось в п. 2.4.
В задачах параметрической идентификации используются модели объекта с шумом измерений, задаваемые передаточными функциями и структурой рис. 3.2. Считая порядки моделей заданными, задачей параметрической идентификации стохастической системы считается определение оценок коэффициентов полиномов модели A,B,C и D по результатам измерений входа u(t) и выхода y(t). Свойства получаемых оценок (состоятельность, несмещенность и эффективность) зависят от характеристик внешних возмущений и метода идентификации, при этом существенную роль играет вид закона распределения внешних возмущений.
Важным преимуществом методов параметрической идентификации является возможность использования рекуррентных алгоритмов, позволяющих проводить текущую идентификацию в реальном времени при номинальных режимах работы объекта. Эти преимущества определили широкое использование методов параметрической идентификации в задачах управления и автоматизации. К таким методам относятся: метод наименьших квадратов, метод максимального правдоподобия и метод стохастической аппроксимации .
Подставим в уравнение АРСС - модели значения сигналов y(k) и u(k), а также оценки параметров объекта, полученные после (k – 1) - го такта [32]:
![]() . (5.1)
. (5.1)
В этом уравнении ноль, стоящий в правой части уравнения (получающийся после переноса всех слагаемых в левую часть) заменен величиной ошибки e(k). Она отражает наличие погрешности измерений выхода и неточность оценок параметров модели ai и bi. Обозначим значение y(k) как значение y(k/k – 1), предсказанное в момент (k – 1) на момент k. Тогда
![]() , (3.6)
, (3.6)
Или ![]() , (3.8)
, (3.8)
где ![]() - вектор оценок,
- вектор оценок,
![]() - вектор данных,
- вектор данных,
d – величина дискретного запаздывания.
Ошибка уравнения e(k) будет иметь вид
![]() , (3.9)
, (3.9)
где y(k) – новое измерение; y(k/k-1) – предсказанное значение измерения.
Предположим, что измерения выполнены на интервале
k = 1, 2, ..., n + d + N
а порядок АРСС – модели (n, n). Тогда на основании (3.8) (5.4)получим векторно-матричное уравнение вида
![]() , (3.10)
, (3.10)
где ![]() - вектор выхода,
- вектор выхода,
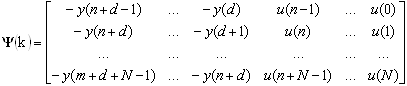 - матрица данных,
- матрица данных,
![]() – вектор ошибок.
– вектор ошибок.
Функция потерь по критерию наименьших квадратов определяется как квадрат ошибки, что в векторном представлении дает
![]() , (3.11)
, (3.11)
а ее минимум находится из условия
 . (3.12)
. (3.12)
Полагая, что N ³ 2n, обозначим
![]() , (3.13)
, (3.13)
тогда оценка минимизирующая функцию потерь (3.11)будет иметь вид:
![]() . (3.14) .
. (3.14) .
Алгоритм (3.14) – нерекуррентный алгоритм идентификации по методу наименьших квадратов, так как вычисление оценок параметров модели ![]() производится лишь после того как сформирован весь массив входных и выходных данных объекта
производится лишь после того как сформирован весь массив входных и выходных данных объекта
![]() .
.
Рекуррентный алгоритм МНК получается после записи новой ![]() и старой
и старой![]() оценок и вычитания одной из другой:
оценок и вычитания одной из другой:
![]() . (3.15)
. (3.15)
Вектор коррекции определяется из соотношения:
 . (3.16)
. (3.16)
Вектор ![]() на следующем шаге вычисляется как
на следующем шаге вычисляется как
![]() . (3.17)
. (3.17)
Рекуррентный алгоритм метода наименьших квадратов реализуется в следующей последовательности.
1. Задаются начальные значения вектора оценок параметров модели и вектора данных:
![]() ,
,
где ![]() – достаточно большое число, I – единичная матрица соответствующей размерности.
– достаточно большое число, I – единичная матрица соответствующей размерности.
2. Производятся измерения входного и выходного сигналов объекта, и формируется новый вектор данных ![]() .
.
3. Вычисляется вектор коррекции ![]() по формуле (3.16)
по формуле (3.16)
4. Находится новая оценка параметров ![]() по формуле (3.15)
по формуле (3.15)
5. Вычисляется новый вектор ![]() по формуле (3.16)
по формуле (3.16)
Обычно для промышленных объектов характерна коррелированность во времени шумов, действующих на объект. Использование обычного МНК при таком шуме, т. е. при минимизации выражения (3.11), вызывает смещение оценок параметров, увеличение дисперсии этих оценок. Ухудшение этих оценок, в свою очередь, приводит к ухудшению свойств оценок переменных состояния х(k) и в итоге к снижению качества управления.
Для получения несмещенных оценок используется обобщенный МНК (ОМНК).
При использовании ОМНК оцениваются параметры моделей объекта и шума на его выходе. Идентификации подвергается модель максимального правдоподобия (МП - модель) для которой связь между переменными задается уравнением
![]() . (3.18)
. (3.18)
Вводя расширенные векторы данных
![]() (3.19)
(3.19)
и параметров
![]() , (3.20)
, (3.20)
выход ной сигнал объекта можно записать через (5.13) и (5.14)
![]() . (3.21)
. (3.21)
Так как сигнал помехи е(к) неизвестен, то используется его оценка ![]() , определяемая из уравнения
, определяемая из уравнения
![]() . (3.22)
. (3.22)
Оценки параметров МП - модели вычисляются аналогично как в МНК по формулам (3.15) – (3.17).
На рис. 3.3. -3 показаны результаты идентификации.
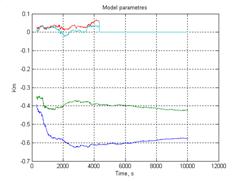
Рис. 3.3. Коэффициенты АРСС – модели объекта.

Рис. 3.4. Выходные сигналы объекта и модели.
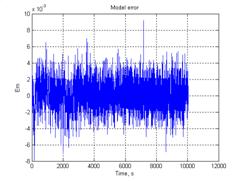
Рис. 3.4. Ошибка идентификации.

Рис. 3.5. Корреляционная функция ошибки идентификации.
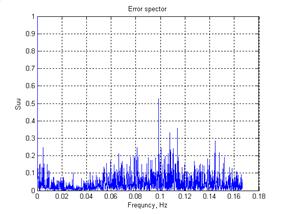
Рис. 3.5. Спектральная плотность ошибки идентификации.

Рис. 3.6. Гистограмм ошибки идентификации.
Похожие работы
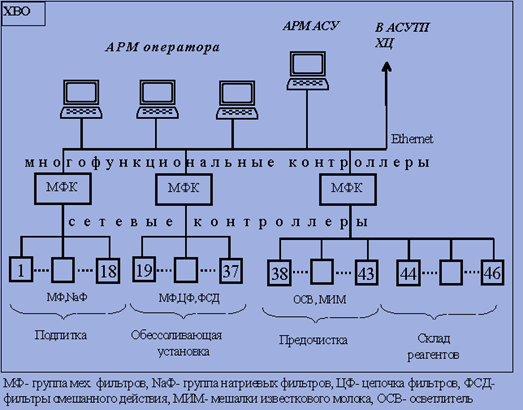
... функционирующий элемент технологического оборудования: механический фильтр, осветлитель, цепочку фильтров блока обессоливания, группу баков и насосов и т.п. 3. Технологическая схема приготовления топлива В котлах Орской ТЭЦ-1 сжигается природный газ, представляющий собой механические смеси различных газов.Состав газа ( в %)а) метан - 97,37б) ...
... VS 24 ат.д.о и после задвижки, медленно открыть ее полностью, также медленно полностью открыть отсечную задвижку VB после турбины. 1.14. Параллельно с началом прогрева турбины включить в работу конденсаторы осевшего пара для чего: - прогреть п/провод до эжектора; - включить по воде конденсатор осевшего пара; - включить в работу эжектор и создать давление в линии отсоса пара уплотнений 0,3 ...



... состава, введенным согласно закону «О городском пассажирском транспорте», договорных отношений между местными властями и транспортными предприятиями. 3. РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ НА ГОРОДСКОМ ЭЛЕКТРИЧЕСКОМ ТРАНСПОРТЕ 3.1. Регенерация масел Установки для регенерации отработанных масел и схемы технологического процесса Проводимые исследования кафедрой городского электрического транспорта ( ...
... , что в условиях повышенных требований к защите окружающей среды и расходу топлива дизели остаются наиболее перспективными двигателями. В настоящее время в ФРГ на 14 % автомобилей установлены дизели, во Франции — на каждом третьем автомобиле, а в Австрии — на каждом втором. 2. Система питания автомобиля ПАЗ 4230 2.1 Описание конструкции, принципа работы системы и основных элементов. ...
0 комментариев