Расчёт коэффициентов передачи объекта
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА
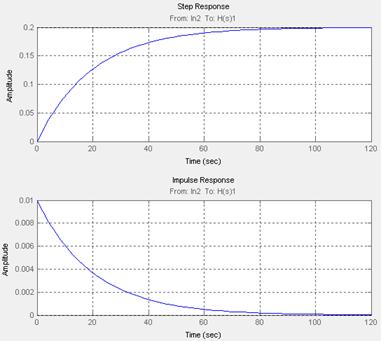
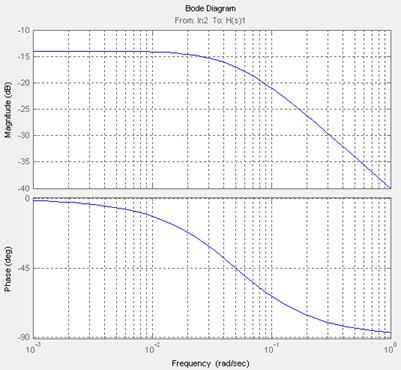
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
Расчёт частотных характеристик в системе MathCAD
Расчет расширенных частотных характеристик объекта
ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
ПИ – регулятор
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Замкнутая система с И – регулятором
Замкнутая система с П – регулятором по возмущению
ОЦЕНКА КАЧЕСТВА РАБОТЫ САУ
Навигация
ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
Линейные автоматические системы регулирования
61629
знаков
361
таблица
80
изображений
5 ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
Регулятор состоит из элементарных звеньев и включается в цепь обратной связи системы автоматического регулирования. Автоматические регуляторы по своим динамическим свойствам подразделяются: на линейные и нелинейные. При проектировании наиболее часто из линейных регуляторов применяют:
- П – регулятор (пропорциональный регулятор);
- И – регулятор (интегральный регулятор);
- ПИ – регулятор (пропорционально-интегральный регулятор);
- Д – регулятор (дифференциальный регулятор);
- ПД – регулятор (пропорционально-дифференциальный регулятор);
- ПИД – регулятор (пропорционально-интегро-дифференциальный регулятор);
Требования, предъявляемые к регулятору, обусловлены требованиями ко всей системе регулирования. Для обеспечения устойчивости замкнутой системы, при проектировании систем стремятся обеспечивать их устойчивость, так чтобы изменения параметров в некоторых пределах не могло привести к неустойчивости системы. Расчёт параметров настройки регуляторов производится при помощи расширенных частотных характеристик объекта. Расширенные частотные характеристики рассчитываются при подстановке ![]() . Одним из методов расчёта, является критерий Найквиста. Этот частотный критерий устойчивости, разработанный в 1932г. Американским учёным Г.Найквистом, позволяет судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристике. Критерий Найквиста формулируется следующим образом: Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы
. Одним из методов расчёта, является критерий Найквиста. Этот частотный критерий устойчивости, разработанный в 1932г. Американским учёным Г.Найквистом, позволяет судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристике. Критерий Найквиста формулируется следующим образом: Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы ![]() не охватывает точку (-1,0). В математической форме условия устойчивости системы по критерию Найквиста следующие:
не охватывает точку (-1,0). В математической форме условия устойчивости системы по критерию Найквиста следующие:
В данной работе рассмотрено несколько регуляторов, при выборе регуляторов необходимо пользоваться рекомендациями. В целом процедуры расчета регулятора следующие:
1) Имея передаточную функцию объекта (любого порядка с запаздыванием или без него) зададимся величиной ![]() , обеспечивающей требуемое качество переходного процесса в замкнутой системе, а также диапазоном и шагом изменения частоты
, обеспечивающей требуемое качество переходного процесса в замкнутой системе, а также диапазоном и шагом изменения частоты![]() .
.
2) Рассчитаем значения расширенной частотной характеристики объекта и в явном виде определим параметры настройки регулятора в заданном диапазоне частот.
3) Удовлетворяя фазовым соотношениям, находим по полученным графикам и таблицам оптимальные параметры настройки регуляторов.
5.1 П - регулятор 5.1.1 Расчёт П - регулятора вручнуюПередаточная характеристика имеет вид:
![]()
![]()
где: ![]() - коэффициент передачи при 50%;
- коэффициент передачи при 50%;
![]() - постоянная времени;
- постоянная времени;
![]() - время запаздывания.
- время запаздывания.
Заменив в выражении для объекта второго порядка величину ![]() на мнимую величину
на мнимую величину ![]() , получим комплексную функцию
, получим комплексную функцию ![]() .
.
![]()
где: ![]() - степень колебательности;
- степень колебательности;
![]() - диапазон изменения частоты.
- диапазон изменения частоты.
![]()
![]()


Обозначим в формуле вещественные и мнимые части частотной характеристики:
Подставив ![]() и
и ![]() в уравнение, получим:
в уравнение, получим:
![]()
![]() ;
; ![]() ;
; ![]()
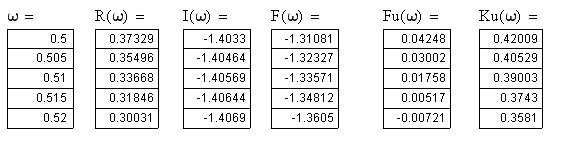
Найдём значение ![]() для некоторых частот, результаты вычислений сведем в таблицу.
для некоторых частот, результаты вычислений сведем в таблицу.
Таблица 10 - Результаты вычислений
|
|
|
|
|
| 0 | 1 | 0 | -1 |
| 0,1 | 1,195 | -0,485 | -0,718 |
| 0,2 | 1,241 | -1,198 | -0,417 |
| 0,5 | 0,345 | -1,152 | -0,239 |
| 1 | 0,12 | -0,289 | -1,226 |
| Для П - регулятора будем иметь следующие расчетные соотношения: Kп = Rp = R0 (m,) / [R20 (m,) + I20 (m,)], п (m,w)= + 0 (m,w). Оптимальный параметр настройки П - регулятора соответствует п (m,w) = 0. |
| Расчет параметров настройки: |
|
|
| -степень колебательности; |
| -диапазон изменения частоты; |
| -замена p на комплексную переменную i; |
|
|
| -передаточная функция объекта; |
|
|
|
|
| -действительная составляющая; |
|
|
| -мнимая составляющая; |
| -знаменатель; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| -фазо-частотная характеристика регулятора; |
|
|
| -действительная составляющая регулятора; |
|
|
| -мнимая составляющая регулятора; |
|
|
| -Kп регулятора. |
Таблица 11 – Результаты расчёта параметров настройки П – регулятора по расширенным частотным характеристикам
|
|

|
|

|
|

|
|

|
|

|
|

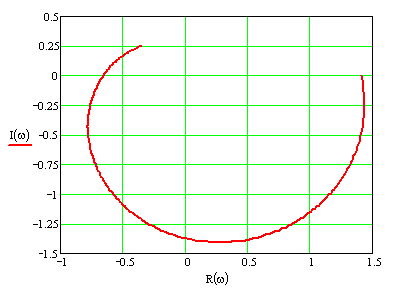
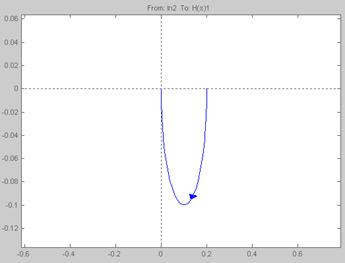
Рисунок 10.1 – АФХ объекта
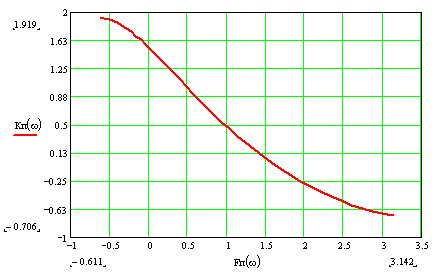
Рисунок 10.2 – ![]() П - регулятора
П - регулятора
Проведем более точное исследование П – регулятора при частоте:
|
|
| -диапазон изменения частоты; |
Таблица 12 – Результаты расчёта параметров настройки П – регулятора по расширенным частотным характеристикам
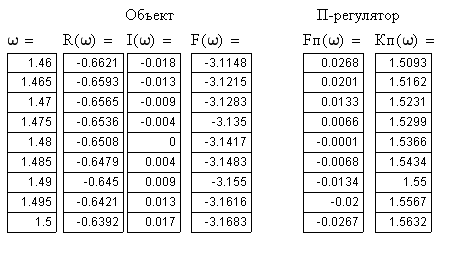
Коэффициент передачи П – регулятора ![]() , будем выбирать, при нулевой фазовой составляющей. Таким образом, при
, будем выбирать, при нулевой фазовой составляющей. Таким образом, при ![]() ,
, ![]() .
.
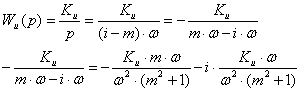
Для И – регулятора передаточная характеристика имеет вид:
![]()
Заменив комплексную переменную ![]() на
на ![]() получим выражение вида:
получим выражение вида:
Действительная часть:
![]()
Мнимая часть:
![]()
Выразим ![]() :
:
![]()
![]() и
и ![]() возьмем из таблицы 10.
возьмем из таблицы 10.
Найдём значение ![]() для некоторых частот, результаты вычислений сведем в таблицу:
для некоторых частот, результаты вычислений сведем в таблицу:
Таблица 13 – Результаты вычислений
|
|
|
|
|
| 0 | 1 | 0 | 0 |
| 0,1 | 1,195 | -0,485 | 0,341 |
| 0,2 | 1,241 | -1,198 | 0,396 |
| 0,5 | 0,345 | -1,152 | 0,567 |
| 1 | 0,12 | -0,289 | 5,817 |
|
|
|
|
|
|
|
|
| - степень колебательности; |
|
|
| -диапазон изменения частоты; |
|
|
| -замена p на комплексную переменную iw; |
Таблица 14 – Результаты расчёта параметров настройки И – регулятора по расширенным частотным характеристикам
|
|

|
|

|
|

|
|

|
|

|
|

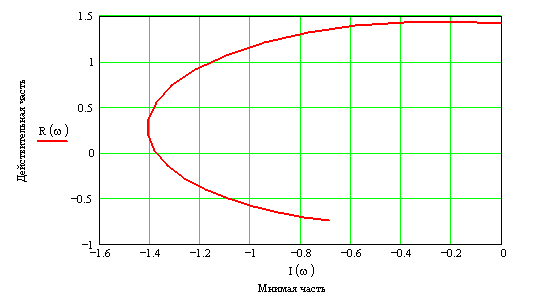
Рисунок 11.1 – АЧХ
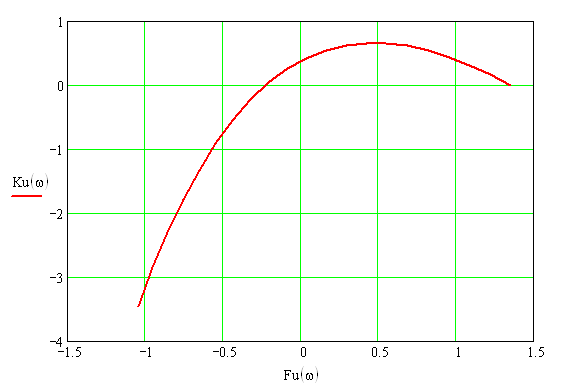
Рисунок 11.2 – ![]() И – регулятора
И – регулятора
Проведем более точное исследование И – регулятора при частоте:
|
|
| -диапазон изменения частоты; |
Таблица 15 – Результаты расчёта параметров настройки И – регулятора по расширенным частотным характеристикам
Коэффициент передачи И – регулятора ![]() , будем выбирать, при нулевой фазовой составляющей. Таким образом, при
, будем выбирать, при нулевой фазовой составляющей. Таким образом, при ![]() ,
, ![]()
Похожие работы
... , является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Автоматические системы регулирования должны обеспечивать: - устойчивость системы при любых режимных ситуациях объекта; - минимальное время регулирования; - минимальные динамические и статические отклонения регулируемой величины, не выходящие ...
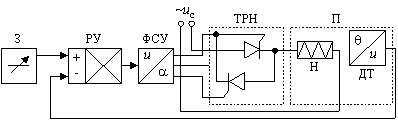
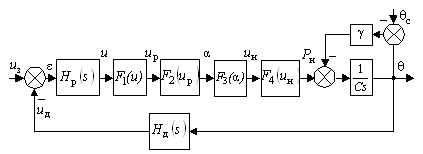
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
... системой: время наработки на отказ системы увеличилось на 2,73%. Вывод В ходе курсовой работы было произведено техническое обеспечение автоматической системы регулирования качества стабильного гидрогенизата. Были выбраны средства контроля и регулирования и обоснован их выбор. Был произведен расчет надежности контура регулирования, и предложена схема для резервирования самого ненадежного ...
0 комментариев