СОСТОЯНИЕ
ВОПРОСА И ПОСТАНОВКА
ЗАДАЧИ
Техническое
описание системы
Анализ
существующих
средств автоматизации
Требования
к системе
Требования
к эксплуатации,
техническому
обслуживанию,
ремонту и хранению
компонентов
системы
Требования
к информационному
обеспечению
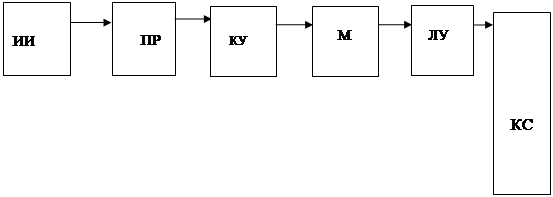
Разработка
структурной
схемы
Метод
матриц в кинематике
манипуляторов
Решение
обратной задачи
кинематики
Составление
эскиза процесса
сверления
Интерфейс
последовательного
канала связи
ЭВМ
Расчет
формы сигнала
в линии связи
и
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ
ЧАСТЬ
Технология изготовления платы
ЭКОНОМИЧЕСКАЯ
ЧАСТЬ
Определение
договорной
цены НИР и плановой
прибыли
Напряжение
питания электропаяльника
не должно превышать
36 В, а мощность
не более 40 Вт
Противопожарная
защита
Навигация
Расчет формы сигнала в линии связи и
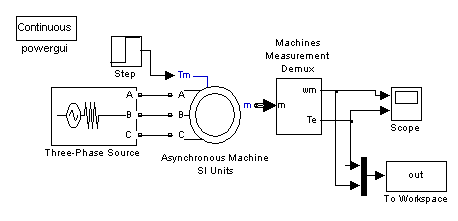
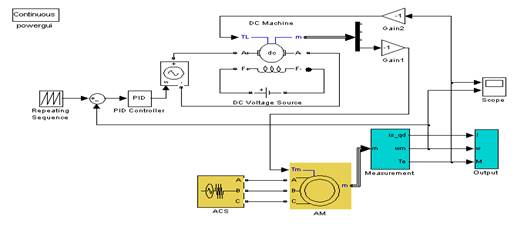
Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
140823
знака
20
таблиц
31
изображение
3.6.4 Расчет формы сигнала в линии связи и
скорости обмена
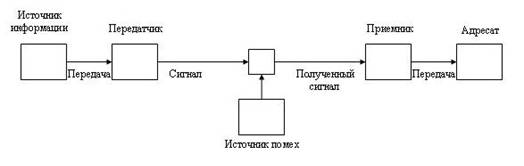
Если генератор вырабатывает фронт посылки с амплитудой [0, +Е] вольт, то кривая тока, протекающего по сопротивлению нагрузки на приемном конце, может быть определена с помощью выражения:

где I - установившееся значение тока в кабеле, А;
где bk - корни промежуточного трансцендентного уравнения;
а - нормированная нагрузка, равная:

 - нормированное
по t время;
- нормированное
по t время;
![]() -
постоянная
времени кабеля.
-
постоянная
времени кабеля.
Здесь R и С - сопротивление, Ом/км, и емкость, Ф/км одного километра кабеля, l - длина кабеля, км.
Согласно [ ] под Rон можно понимать либо внутреннее сопротивление генератора, либо сопротивление приемника. Однако эксперимент показал, что формулу ( ) можно использовать и для более общего случая. Поэтому общей нагрузкой кабеля будем считать:
Rон=Ro+Rн
Из анализа расчетных кривых построенных по формуле ( следует, что они имеют вид сдвинутых по оси n экспонент с различным наклоном. Некоторое отличие от экспоненциальной формы имеет место лишь в самых нижних частях кривых.
Поскольку при расчетах наиболее существенными являются ее средняя (определяющая наклон фронта) и верхняя (определяющая время нарастания сигнала) части, можно допустить некоторую неточность в воспроизведении нижней части кривой. Это дает возможность найти приближенное выражение для расчета тока в приемнике:
где b - множитель, учитывающий изменение наклона кривой;
d - оператор сдвига, учитывающий смещение кривой.
Воспользуемся формулой для b, полученной с помощью аппроксимирующей функции, в качестве которой выбрана окружность. Получим формулу:
![]()
![]()
Аналогичным методом получим формулу для d:
![]()
![]()
Таким
образом, поставленная
задача решена:
получены простые
выражения ( )-( ), имеющие замкнутую
форму ряда.
Ошибка при
определении
ординат кривой,
лежащих в диапазоне
(0.4![]() 1.0)I,
не превышает
0.015 установившегося
значения амплитуды
сигнала, которое
определяется
как:
1.0)I,
не превышает
0.015 установившегося
значения амплитуды
сигнала, которое
определяется
как:
Если
передача ведется
двухполярными
посылками с
амплитудой
на передающем
конце ![]() Е,
как в нашем
случае, то формула
( ) запишется
в виде
Е,
как в нашем
случае, то формула
( ) запишется
в виде
Вычислим форму сигнала на приемной стороне кабеля, зная, что связь организована с помощью кабеля ТГ, который имеет следующие характеристики:
погонное сопротивление R=190 Ом/км;
погонную емкость С=50 нФ/км;
протяженность l=5 км.
Расчет формы сигнала и скорости обмена производился в Eureka версии 1.0 и приводится ниже.
R=190 ; Сопротивление кабеля, Ом
C=50e-9 ; Емкость кабеля, Ф
l=5 ; Длина кабеля, км
;--------------------------------
E=12 ; Выходное напряжение передатчика
Ro=5 ; Выходное сопротивление передатчика
Rn=100 ; Входное сопротивление приемника
;--------------------------------
Pr=0.95 ; Предел амплитуды на входе
; приемника
;--------------------------------
Ron=Ro+Rn; Общая нагрузка кабеля
a=Ron/R/l; Нормированная нагрузка
b=0.824-sqrt(0.461-(0.405-0.64*a)^2)
; Множитель, учитывающий изменение наклона
;кривой
d=1.932+sqrt(1.574-(1.207-2*a)^2)
; Оператор сдвига, учитывающий смещение
;кривой
I=E/(R*l+Ron) ; Установившееся значение
;амплитуды сигнала на выходе передатчика
Amp=Pr*I ; Амплитуда сигнала на входе при-
;емника
Ta=0.02915*C*R*l^2 ; Постоянная времени кабеля
P=d-ln((I-Amp)/I)/b ; Нормированная дли-
;тельность посылки
Tc=P*Ta ; Длительность посылки
V=1/Tc ; Скорость обмена по линии связи
i(t)=I*(1-exp(-b*(t/Ta-d))) ;
Результаты расчета:
Variables Values
a = .11052632
Amp = .010805687
b = .23301088
C = 5.0000000e-08
d = 2.7078272
E = 12.000000
I = .011374408
l = 5.0000000
P = 15.564447
Pr = .95000000
R = 190.00000
Rn = 100.00000
Ro = 5.0000000
Ron = 105.00000
Ta = 6.9231250e-06
c = .00010775461
V = 9280.3453
Скорость
модуляции ![]() Бод, что удовлетворяет
условиям эксплуатации
проектируемого
устройства.
Бод, что удовлетворяет
условиям эксплуатации
проектируемого
устройства.
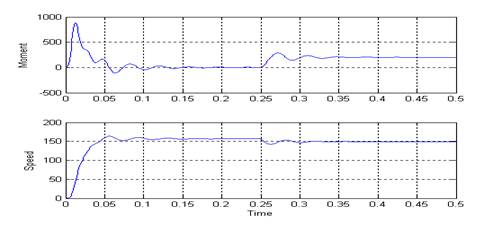
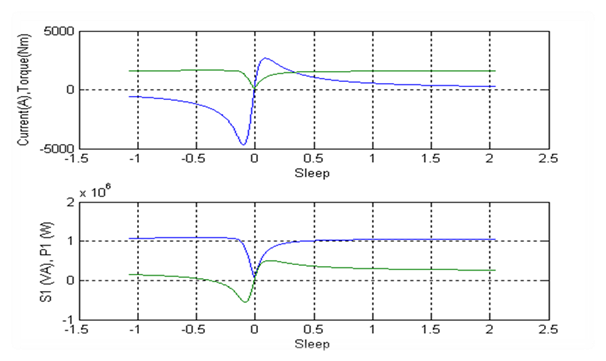
Вид сигнала на стороне приема изображен на рисунке
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...

... современным компьютерам, должна стать мощным усилителем мыслительных процессов в образовании. И здесь особая роль отводится преподавателям, которые являются носителями технологии образования и которые должны творчески переосмыслить накопленный интеллектуальный багаж в соответствии с новыми технологическими возможностями. До настоящего времени в российском обществе отсутствует четкое понимание ...
... состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд. 4. Экономическая часть 4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201) Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения ...
0 комментариев