СОСТОЯНИЕ
ВОПРОСА И ПОСТАНОВКА
ЗАДАЧИ
Техническое
описание системы
Анализ
существующих
средств автоматизации
Требования
к системе
Требования
к эксплуатации,
техническому
обслуживанию,
ремонту и хранению
компонентов
системы
Требования
к информационному
обеспечению
Разработка
структурной
схемы
Метод
матриц в кинематике
манипуляторов
Решение
обратной задачи
кинематики
Составление
эскиза процесса
сверления
Интерфейс
последовательного
канала связи
ЭВМ
Расчет
формы сигнала
в линии связи
и
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ
ЧАСТЬ
Технология изготовления платы
ЭКОНОМИЧЕСКАЯ
ЧАСТЬ
Определение
договорной
цены НИР и плановой
прибыли
Напряжение
питания электропаяльника
не должно превышать
36 В, а мощность
не более 40 Вт
Противопожарная
защита
Навигация
Анализ существующих средств автоматизации
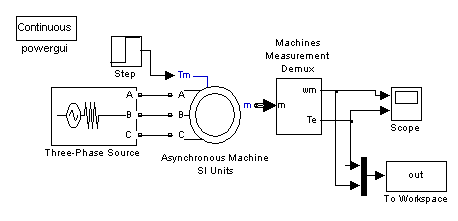
Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
140823
знака
20
таблиц
31
изображение
1.3 Анализ существующих средств автоматизации
Известные в настоящее время технические устройства для частотного управления асинхронным электроприводом в полной мере не отвечают требованиям, предъявляемым к мощному высоковольтному электроприводу и им присущи следующие недостатки:
ограниченная низкоскоростными электроприводами область применения, необходимость изготовления специальной машины или переделка серийной, применение специальных устройств для механического сочленения валов, невозможность применения в запыленных и агрессивных средах, что обусловлено наличием датчиков на валу и внутри машины;
высокая сложность технической реализации, обусловленная наличием сложных технических устройств: координатного преобразования, векторных фильтров, фазовращателей, функциональных преобразователей, блоков коррекции мгновенного значения частоты;
наличие большого числа датчиков, осуществляющих высоковольтную гальваническую развязку;
невысокая надежность, что обусловлено наличием датчиков на валу и внутри машины, высокой сложностью технической реализации блоков АСР, датчиков, осуществляющих высоковольтную гальваническую развязку.
1.4 Обоснование системы автоматического управления
При частотном управлении асинхронными двигателями наиболее часто используются следующие законы: поддержание постоянства потокосцепления статора (Y1=const), поддержание постоянства главного потока машины (Y0=const), поддержание постоянства потокосцепления ротора (Y2=const), и регулирование величины потокосцепления в зависимости от величины нагрузочного момента (Y1, Y0, Y2)=f(M)).
Первый закон реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основным недостатком такого закона является пониженная перегрузочная способность двигателя при работе на высоких частотах, что обусловлено увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.
В то же время существует ряд приводов таких механизмов как насосы, компрессоры, конвейеры и т. д., которые занимают промежуточное положение между динамичными и низкодинамичными, и для которых существующие системы не в полной мере удовлетворяют предъявляемым к этим приводам требованиям. Высокодинамичные привода имеют сложную систему управления и повышенные энергетические потери при недогрузе двигателей, а низкодинамичные привода не всегда способны отработать быстрые изменения статического момента.
На основании вышесказанного можно сделать вывод, что существующие системы не в полной мере отвечают требованиям, предъявляемым к электроприводам c асинхронными двигателями.
Учитывая, что в настоящее время большинство приводов таких механизмов как вентиляторы, насосы, компрессоры и т. д. имеют нерегулируемый привод, актуальной является задача выбора системы управления. Причем система управления должна обеспечивать достаточно высокое быстродействие, надежность и высокие энергетические характеристики привода.
Как уже было отмечено, высокими энергетическими характеристиками обладают системы с регулированием магнитного потока в функции нагрузки. Увеличить их динамические характеристики можно путем форсировки статорного напряжения (тока) во время переходных процессов и частых формирований управляющих воздействий. Получить высокую надежность можно за счет применения упрощенной системы регулирования, отказа от встроенных в двигатель и механически связанных с ротором датчиков.
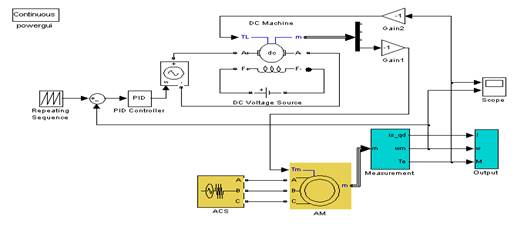
На рис. показана структурная схема системы, поддерживающей постоянство угла между векторами тока статора (I1) и потокосцепления ротора (Y2), что равнозначно поддержанию постоянства относительного скольжения двигателя. Система управления состоит из: задатчика интенсивности (1); программируемого контроллера (2); блока широтно - импульсного модулятора (3); асинхронного электродвигателя с короткозамкнутым ротором (4); датчика тока (5) и блока определения угла (6). Поддержание постоянства угла между I1 и Y2 обеспечивает работу двигателя в области номинального режима с максимальными значениями КПД и cos(j). Кроме того, привод, обладая абсолютно жесткой механической характеристикой, что обусловлено постоянством относительного скольжения, получает возможность точного регулирования скорости вращения ротора путем изменения частоты поля.
Для технической реализации системы с поддержанием постоянства коэффициента полезного действия электродвигателя необходимо знать либо мгновенные величины относительного скольжения либо величину угла между током статора и потокосцеплением ротора. Измерить скольжение можно с помощью электромеханического или цифрового датчика скорости, угол между I1 и Y2 - с помощью датчиков напряжения и датчиков фазных токов. Так как датчик скорости существенно повышает стоимость системы регулирования, эксплуатационные затраты и ухудшает общую надежность системы, то более предпочтителен вариант системы с обратной связью по углу между векторами тока статора и потокосцепления ротора.
Существующие в настоящее время методы определения угла между I1 и Y2, например [1, 2, 3], имеют низкое быстродействие (не более шести измерений искомого угла за один оборот вектора поля) и невысокую точность измерения, обусловленную “дрейфом нуля” аналоговых элементов схемы и вводом в алгоритм определения углов активного сопротивления статора, значение которого изменяется в широких пределах при нагреве двигателя.
Рассмотрим алгоритм определения угла между I1 и Y2, лишенный вышеуказанных недостатков. Для обоснования алгоритма построим векторную диаграмму асинхронного двигателя с короткозамкнутым ротором, отложив вдоль действительной оси Ra ток намагничивания I0, определенный по известным реактивным параметрам асинхронного двигателя и измеренным значениям фазных токов и напряжений [4].

Значение углов между I1 и Y2 можно определить в реальном масштабе времени, когда вращение вектора тока статора статора I1 определяется частотой питания асинхронного двигателя и в ускоренном масштабе времени, когда вращение вектора тока I1 определяется в модели выбранным шагом временного интервала и быстродействием микропроцессорной системы. Второй вариант измерения углов более предпочтителен, так как позволяет осуществить больше измерений. По измеренным значениям фазных токов двигателя определяем величину вектора тока I1 и совмещаем его в модели с действительной осью Ra, а затем переводим (в произвольный момент времени t1) вектор тока I1 в неподвижную, относительно статора, систему координат, то есть начинает выполняться программа, согласно которой вектор тока I1 поворачивается против часовой стрелки со скоростью, определяемой быстродействием микропроцессорной системы и выбранным шагом временного интервала.

 (1), где a=w0t
- текущий угол
между вектором
тока статора
и действительной
осью Ra. В момент
времени t2
вектор тока
статора I1
займет положение
OC, при котором
векторы тока
ротора I2
и потокосцепления
ротора Y2
взаимно перпендикулярны,
то есть g(t2)=g.
(1), где a=w0t
- текущий угол
между вектором
тока статора
и действительной
осью Ra. В момент
времени t2
вектор тока
статора I1
займет положение
OC, при котором
векторы тока
ротора I2
и потокосцепления
ротора Y2
взаимно перпендикулярны,
то есть g(t2)=g.
Из рис. видно, что при g(t2)=g выполняется соотношение:
I1Чsinb=BC=AC+AB.
Величина
отрезка AB определяется
из подобия
треугольников
OBA и OED:  .
.
Так как AC = i2 (из векторной диаграммы), то
BC = I2
+
 =
=  .
.
Величина отрезка AC определяется из треугольника АFC:
![]() (2).
(2).
Таким образом, изменяющийся во времени угол g(t) будет равен углу между векторами тока намагничивания I0 и потокосцепления ротора Y2 асинхронного двигателя в момент выполнения равенства:
 .
(3)
.
(3)
Из векторной диаграммы (рис. ) видно, что искомый угол b между векторами тока статора I1 и потокосцепления ротора Y2 будет определяться как:
b = a(t2) + g(t2) = w0Чt + g
2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2.1 Наименование и область применения
Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем.
Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом.
2.2 Основание для проведения разработки
Проектируемая АСУ предназначена для управления асинхронным двигателем и осуществляет регулирование и измерение его основных параметров.
Автоматизированная система управления асинхронным двигателем может применяться для замены уже установленных систем управления устаревших образцов. При этом требуются минимальные капитальные затраты, но достигается значительное улучшение работы объекта управления.
2.3 Цель и назначение разработки
Целью создания АСУ является повышение технико-экономических показателей работы асинхронного двигателя. При этом эффективность управления достигается за счет применения современных методов управления технологическими процессами, а также использования новейших технических средств автоматизации.
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...

... современным компьютерам, должна стать мощным усилителем мыслительных процессов в образовании. И здесь особая роль отводится преподавателям, которые являются носителями технологии образования и которые должны творчески переосмыслить накопленный интеллектуальный багаж в соответствии с новыми технологическими возможностями. До настоящего времени в российском обществе отсутствует четкое понимание ...
... состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд. 4. Экономическая часть 4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201) Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения ...
0 комментариев