СОСТОЯНИЕ
ВОПРОСА И ПОСТАНОВКА
ЗАДАЧИ
Техническое
описание системы
Анализ
существующих
средств автоматизации
Требования
к системе
Требования
к эксплуатации,
техническому
обслуживанию,
ремонту и хранению
компонентов
системы
Требования
к информационному
обеспечению
Разработка
структурной
схемы
Метод
матриц в кинематике
манипуляторов
Решение
обратной задачи
кинематики
Составление
эскиза процесса
сверления
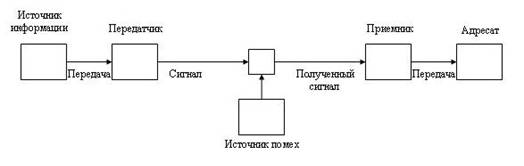
Интерфейс
последовательного
канала связи
ЭВМ
Расчет
формы сигнала
в линии связи
и
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ
ЧАСТЬ
Технология изготовления платы
ЭКОНОМИЧЕСКАЯ
ЧАСТЬ
Определение
договорной
цены НИР и плановой
прибыли
Напряжение
питания электропаяльника
не должно превышать
36 В, а мощность
не более 40 Вт
Противопожарная
защита
Навигация
Метод матриц в кинематике манипуляторов
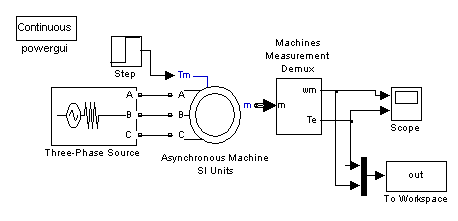
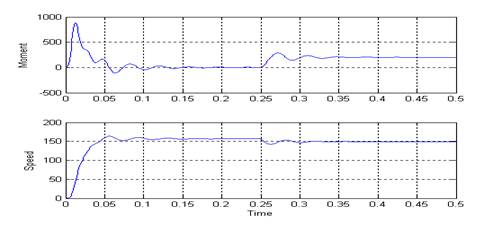
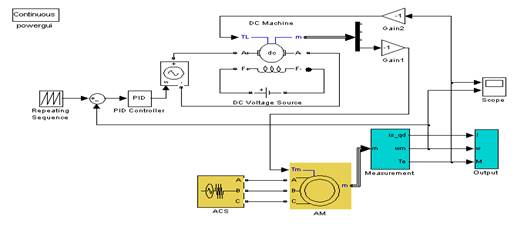
Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
140823
знака
20
таблиц
31
изображение
3.4.4 Метод матриц в кинематике манипуляторов
Метод матриц можно применять к расчету любого манипулятора с поступательными и вращательными кинематическими парами. Универсальность метода покупается ценой некоторой избыточности вычислений. Этот метод развивался параллельно с развитием вычислительной техники, и он больше приспособлен к расчетам на ЭВМ, нежели к расчетам вручную. Его использование требует свободного обращения с матричным аппаратом.
3.4.5 Выбор систем координат
Осью вращательной пары (i, i+1), составленной из звеньев i и i+1, является ось цилиндрического шарнира, жестко связанная со звеном i, вокруг которой вращается звено i+1. Для поступательной пары (i, i+1) осью является любая прямая, параллельная вектору скорости поступательного движения звена i+1 относительно звена i.
Пронумеруем все звенья манипулятора от стойки (звено 0) до схвата (звена n) и свяжем с каждым из них свою систему декартовых координат, выбранную следующим специальным образом: ось Zi идет по оси кинематической пары (i, i+1); начало координат системы i, жестко связанной со звеном i, лежит на общем перпендикуляре к осям Zi-1 и Zi, либо в точке их пересечения, если таковая имеется, либо в любой точке оси кинематической пары, если ось Zi совпадает с осью Zi-1 или параллельна ей; ось Xi идет по общему перпендикуляру, проведенному к осям Zi-1 и Zi, и направлена от точки пересечения этого перпендикуляра с осью Zi-1 к точке его пересечения с осью Zi (или в любую сторону по нормали к плоскости, содержащей оси Zi-1 и Zi, если они пересекаются, или произвольным образом, если Zi-1 и Zi идут по одной прямой); ось Yi выбирается по правилу правой тройки векторов.
Начало координат системы 0, т.е. системы, жестко связанной со стойкой, может лежать в любой точке оси пары (0,1); ось Xо направляется произвольным образом.
Выбор системы n тоже выпадает из общего правила, так как звено n+1 отсутствует. Поэтому предлагается вообразить любого типа пару (n, n+1) и после этого выбрать систему по общему правилу. Начало выбранной таким образом системы называется центром схвата.
3.4.6 Расширенная матрица перехода для кинематической
пары. Определение положения и ориентации звеньев
Специальный выбор систем координат звеньев манипулятора позволяет с помощью лишь четырех параметров описать переход из одной системы в другую. Систему i-1 можно преобразовать в систему i с помощью поворота, двух сдвигов (переносов) и еще одного поворота, выполняемых в следующем порядке:
1) поворот системы i-1 вокруг оси Zi-1 на угол Qi до тех пор, пока ось Xi-1 не станет параллельной оси Xi;
2) сдвиг повернутой системы вдоль оси Zi на величину Si до тех пор, пока оси Xi-1 и Xi не окажутся на одной прямой;
3) сдвиг вдоль оси Xi на величину ai до тех пор, пока не совпадут начала координат;
4) поворот вокруг оси Xi на угол ai до совмещения оси Zi-1 c осью Zi.
Расширенная матрица имеет следующий вид:
В расширенную матрицу Di входят четыре параметра: Qi, ai, Si, ai. Для любой кинематической пары три из них должны быть константами и только один - переменной величиной. Для вращательной пары переменной величиной является угол Qi, а для поступательной пары - перемещение Si.
Для определения положения и ориентации звена i в системе 0, следует найти произведение расширенных матриц А1, А2,... , Аi:
Ti = D1·D2· ... ·Di
Столбцы матрицы Ti имеют следующее геометрическое толкование: первые три элемента первого, второго и третьего столбцов представляют собой направляющие косинусы соответственно осей Xi, Yi, Zi в системе 0; три элемента четвертого столбца - это координаты xi, yi, zi центра системы i в системе 0.
3.4.7 Решение прямой задачи кинематики
Специальные системы координат выбираем в соответствии с указаниями (см. выше). Ось Z0 идет по оси поступательной пары (0,1), вдоль которой тело 1 поступательно перемещается относительно тела 0; ось Z1 идет по оси вращательной пары (1,2), т.е. по оси вращения тела 2; ось Z2 идет по оси вращательной пары (2,3); ось Z3 по оси поступательной пары (3,4); ось Z4 параллельна оси Z3 и проходит через центр схвата. Направление осей X, Y и положения начал координат показаны на конструктивной схеме (см. ниже).
Cоставим матрицы для всех звеньев. Для этого пронумеруем и определим параметры кинематических пар, а результаты занесем в таблицу, приведенную ниже.
|
| Тип пары | № звена i | ||||
| Q | a | S | A | |||
| 0,1 | поступа-тельная | 1 | 0 | 0 | S1 | 0 |
| 1,2 | враща-тельная | 2 | -Q2 | p/2 | S2 | 0 |
| 2,3 | потупа-тельная | 3 | 0 | 0 | S3 | 0 |
| 3,4 | поступа-тельная | 4 | 0 | 0 | S4 | 0 |
Для решения прямой задачи кинематики необходимо составить матрицы. В нашем случае матрицы A1 ,A3 и A4 - матрицы сдвига, а A2 - матрица вращения. Эти матрицы получаются из результирующей матрицы перехода, связывающей системы (i-1) и i.
Рассчитаем результирующие матрицы перехода для заданной кинематической системы манипулятора.
 ;
;
 ;
;
 ;
;
Задача решается при помощи формулы:
![]()
Решение прямой задачи кинематики сводится к тому, что имея значения обобщенных координат определяются элементы матрицы T, которая однозначно устанавливает положение и ориентацию схвата в системе координат стойки.

Координаты центра схвата в системе, связанной со стойкой манипулятора:
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...

... современным компьютерам, должна стать мощным усилителем мыслительных процессов в образовании. И здесь особая роль отводится преподавателям, которые являются носителями технологии образования и которые должны творчески переосмыслить накопленный интеллектуальный багаж в соответствии с новыми технологическими возможностями. До настоящего времени в российском обществе отсутствует четкое понимание ...
... состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд. 4. Экономическая часть 4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201) Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения ...
0 комментариев