СОСТОЯНИЕ
ВОПРОСА И ПОСТАНОВКА
ЗАДАЧИ
Техническое
описание системы
Анализ
существующих
средств автоматизации
Требования
к системе
Требования
к эксплуатации,
техническому
обслуживанию,
ремонту и хранению
компонентов
системы
Требования
к информационному
обеспечению
Разработка
структурной
схемы
Метод
матриц в кинематике
манипуляторов
Решение
обратной задачи
кинематики
Составление
эскиза процесса
сверления
Интерфейс
последовательного
канала связи
ЭВМ
Расчет
формы сигнала
в линии связи
и
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ
ЧАСТЬ
Технология изготовления платы
ЭКОНОМИЧЕСКАЯ
ЧАСТЬ
Определение
договорной
цены НИР и плановой
прибыли
Напряжение
питания электропаяльника
не должно превышать
36 В, а мощность
не более 40 Вт
Противопожарная
защита
Навигация
Разработка структурной схемы
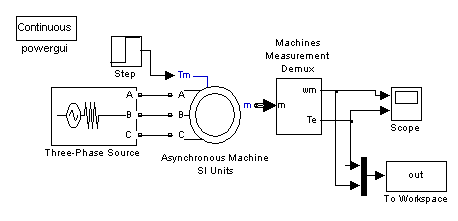
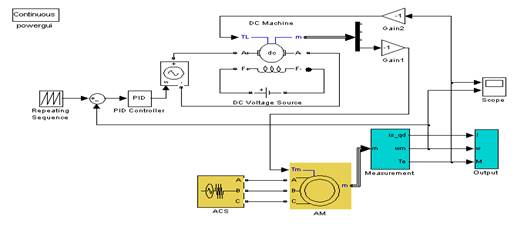
Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
140823
знака
20
таблиц
31
изображение
3.2 Разработка структурной схемы
Разработку структурной схемы автоматического управления асинхронным двигателем начнем с необходимости контроля температуры корпуса двигателя, частоты вращения вала двигателя.
Кроме того для получения информации о скорости вращения вала двигателя расположим тахогенератор, вал которого жестко сопряжен с валом рабочего двигателя. Двухпроводная линия связи соединяет тахогенератор с блоком управления.
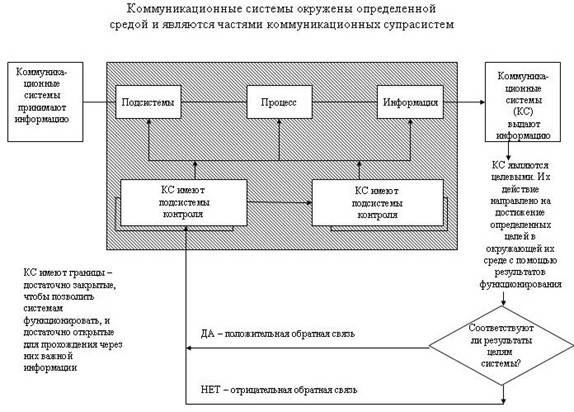
Для контроля работы двигателя и ведения статистики этой работы контроллер соединяется с ЭВМ верхнего уровня.
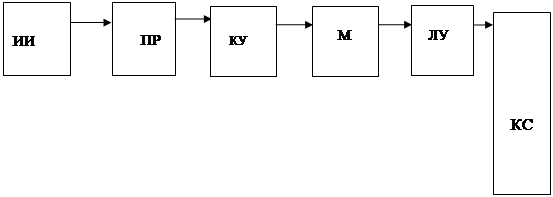
Таким образом структурная схема будет содержать систему датчиков, устройства сбора и промежуточной передачи информации, устройство управления работой установки и машины верхнего уровня.
3.3 Разработка функциональной схемы
Функциональную схему можно условно разбить на блоки:
блок центрального процессора;
блок ввода и преобразования аналоговых сигналов;
блок ввода-вывода дискретных сигналов;
линейные модули;
блок гальванических развязок.
3.3.1 Блок центрального процессора
Блок центрального процессора содержит однокристальный микроконтроллер КР1816ВЕ51, далее - контроллер, микросхему ППЗУ и устройства сопряжения. Для обеспечения доступа к памяти на разрешающий вход микросхемы ППЗУ - К537РФ6 заведен стробирующий выход адреса контроллера ALE, который свидетельствует об установке адреса ячейки памяти ППЗУ на шине адреса. При наличии сигнала выбора микросхемы для ППЗУ, оно (ППЗУ) выставляет на шину данных содержимое ячейки по указанному адресу. В остальных случаях выходы микросхемы памяти находятся в высокоимпедансном состоянии.
Также один из портов контроллера используется как вход от блока ввода и преобразования аналоговых сигналов, как строб завершения преобразования.
Четыре бита этого же порта используются для управления и опроса блока ввода дискретных сигналов, причем два бита - как управляющие и два как информационные.
3.3.2 Блок ввода и преобразования аналоговых сигналов
Базовым элементом блока ввода и преобразования аналоговых сигналов является аналогово-цифровой преобразователь (АЦП), который преобразует сигнал постоянного двуполярного тока в цифровой десятиразрядный двоичный код.
При поступлении сигнала на разрешение преобразования от контроллера АЦП замеряет сигнал на входе, и после завершения преобразования вместе с сигналом “Конец преобразования” выставляет на шину данных код.
3.3.3 Блок ввода-вывода дискретных сигналов
Блок ввода дискретных сигналов предназначен для ввода, нормализации и гальванической развязки сигналов от дискретных датчиков. Блок ввода дискретных сигналов работает совместно с выносными линейными модулями, объединение которых производится двухпроводной линией связи.
Опрос датчиков осуществляется последовательно время-импульсным квитированием сигналов. Цикл опроса разбит на 2 временных интервала - подготовительный и контрольный. Подготовительный сигнал необходим для заряда линейных модулей. Контрольный интервал разбит на 64 временных позиции, 62 из которых несут информацию о состоянии датчиков, 2 позиции выделены для контроля обрыва проводов линии связи.
Блок ввода дискретных сигналов формирует в линию связи специальные положительные и отрицательные импульсы. Импульсами положительной полярности пpоизводится питание и синхронизация pаботы модулей линейных. Ответные импульсы от модулей линейных фоpмиpуются во время пpохождения импульсов отрицательной полярности.
3.3.4 Математическое описание асинхронного двигателя
Асинхронная машина представляет собой систему, как минимум двух обмоток, одна из которых расположена на неподвижной части (статоре), другая на вращающейся части (роторе) машины. Момент машины образуется в результате взаимодействия токов в этих обмотках. Трехфазная обмотка статора подключается к питающей сети, трехфазная обмотка ротора замкнутая. Обмотки статора и ротора магнитосвязаны, поэтому потокосцепление обмотки статора определяется как токами, протекающими по трем фазам обмотки статора, так и токами фаз ротора. Это же относится и к обмотке ротора. Таким образом, имеются две трехфазные обмотки, вращающиеся одна относительно другой. Если к обмотке статора приложено трехфазное напряжение, а обмотка ротора замкнута, то мгновенные значения фазных напряжений статора и ротора задаются следующими уравнениями:
Исходя
из теории
результирующего
вектора, описанной
в [ ], умножим первое
и четвертое
уравнения
системы (1) на
![]() ,
второе и пятое
на
,
второе и пятое
на ![]() ,
третье и шестое
на
,
третье и шестое
на ![]() .
Суммируя полученные
произведения,
получим:
.
Суммируя полученные
произведения,
получим:
![]()
![]() ,
или
,
или
Определим величины потокосцеплений статора и ротора. Предположим, что статор и ротор трехфазного асинхронного двигателя имеют симметричные обмотки, воздушный зазор по всей окружности ротора одинаков, магнитное поле в воздушном зазоре распределено синусоидально, оси обмоток статора и ротора не совпадают, образуя произвольный угол j (рис. 1).
Устанавливаем величину полного магнитного потока, сцепленного со статорной обмоткой фазы A. Для этого учитываем магнитные поля, созданные фазными токами I1A, I1B, I1C. Принимаем, что индуктивности фазных обмоток статора одинаковы и равны l1, взаимные индуктивности фаз A-B, A-C и B-C также одинаковы и равны l0 (по условиям симметрии асинхронной машины). Тогда общий магнитный поток, сцепленный со статорной обмоткой фазы A выразится следующим образом:
![]() .
.
Подставив вместо I1C величину (-I1A-I1B) (так как сумма фазных токов асинхронного двигателя равна нулю), получим:
![]() .
.
Проделав аналогичные операции с фазами B и C, запишем следующую систему уравнений:
Заметим, что индуктивность фазной обмотки статора включает в себя индуктивности от полей рассеяния и от главного потока, то есть
l1=l1l+l10 (4).
Так как, в общем случае, взаимная индуктивность двух обмоток со сдвинутыми на некоторый угол осями равна произведению взаимной индуктивности, которая имела бы место при совпадении осей обмоток, на косинус угла между осями, то взаимную индуктивность можно выразить соотношением:
 (5).
(5).
Учитывая выражения (4) и (5), преобразуем систему уравнений (3) к следующему виду:
где L1 = l1l + 1,5Чl10 = l1l + L0 - полная индуктивность фазы статора.
Рассуждая аналогичным образом относительно обмотки ротора, получим следующие выражения для фазных потокосцеплений роторной обмотки с собственным потоком:
где L2 = l2l + L0 - полная индуктивность фазы ротора.
Определяем величину общего потокосцепления фазы A статора, созданного намагничивающими силами статора и ротора, исходя из рис. 1 и (6):
или,
учитывая, что
I2a
+ I2b
+ I2c
= 0 и ![]() :
:

Выразив аналогичным образом потокосцепления для фаз статора B и C, запишем следующую систему уравнений:
Учитывая,
что ![]() и
и ![]() ,
умножим первое
уравнение
системы (8) на
,
умножим первое
уравнение
системы (8) на
![]() ,
второе на
,
второе на ![]() ,
третье на
,
третье на ![]() и просуммируем
полученные
произведения:
и просуммируем
полученные
произведения:
или
![]() (9).
(9).
Таким же образом получим формулу потокосцепления ротора:
![]() .
(10)
.
(10)
Объединив уравнения (2), (10) и (11), получим систему уравнений обобщенного асинхронного двигателя:
где L0 - взаимная индуктивность обмоток статора и ротора, L1 - индуктивность статора от потоков рассеяния, L2 - индуктивность ротора от потоков рассеяния.
Система уравнений асинхронной машины (11) непригодна для математического моделирования на ЭВМ, так как векторы, относящиеся к статору и ротору, записаны в различных системах координат.
Приведем
систему (11) к
системе координат,
неподвижной
относительно
поля статора,
вращающегося
с угловой скоростью
w0.
Так как система
координат поля
статора повернута
на угол (w0Чt)
относительно
системы координат
статора и на
угол (w0Чt-j),
относительно
системы координат
ротора, где  -
угол между
системами
координат
неподвижно
связанными
со статором
и ротором,
вращающемся
с угловой скоростью
w2,
то для перехода
в систему координат
поля статора
умножаем все
слагаемые
первого и третьего
уравнений
системы (11) на
-
угол между
системами
координат
неподвижно
связанными
со статором
и ротором,
вращающемся
с угловой скоростью
w2,
то для перехода
в систему координат
поля статора
умножаем все
слагаемые
первого и третьего
уравнений
системы (11) на
![]() ,
а слагаемые
второго и четвертого
уравнений
системы (11) на
,
а слагаемые
второго и четвертого
уравнений
системы (11) на
![]() ,
предварительно
представив
вектор потокосцепления
статора как
,
предварительно
представив
вектор потокосцепления
статора как
![]() и вектор потокосцепления
ротора как
и вектор потокосцепления
ротора как ![]() ,
где Y10
и Y20
- векторы потокосцеплений
статора и ротора
в системе координат
поля статора:
,
где Y10
и Y20
- векторы потокосцеплений
статора и ротора
в системе координат
поля статора:
или
где
Y10,
Y20,
I10,
I20
- векторы потокосцеплений
и токов статора
и ротора в системе
координат,
неподвижной
относительно
поля статора,
а ![]() -
абсолютное
скольжение
асинхронного
двигателя.
-
абсолютное
скольжение
асинхронного
двигателя.
Приведем
систему уравнений
(12) к трем переменным:
напряжению
статора U1
и потокосцеплениям
Y1
и Y2.
Для этого из
третьего уравнения
системы (12) выразим
ток статора,
представленный
во вращающейся
системе координат:
 ,
где Y10
- потокосцепление
статора во
вращающейся
системе координат.
Подставив
найденное
значение тока
статора в четвертое
уравнение
системы (12), получим:
,
где Y10
- потокосцепление
статора во
вращающейся
системе координат.
Подставив
найденное
значение тока
статора в четвертое
уравнение
системы (12), получим:
 .
.
Приняв,
что  - коэффициент
электромагнитной
связи статора,
- коэффициент
электромагнитной
связи статора,
 - переходная
индуктивность
ротора, определим
значение тока
ротора во вращающейся
системе координат:
- переходная
индуктивность
ротора, определим
значение тока
ротора во вращающейся
системе координат:
![]() .
Подставляем
найденное
значение тока
ротора во вращающейся
системе координат
во второе уравнение
системы (12):
.
Подставляем
найденное
значение тока
ротора во вращающейся
системе координат
во второе уравнение
системы (12):
 .
.
Откуда,
приняв что  ,
окончательно
получим:
,
окончательно
получим:
 .
(13)
.
(13)
Приведем
первое уравнение
системы (12) к
вращающейся
системе координат.
Для этого из
четвертого
уравнения
системы (12) выразим
ток ротора,
представленный
во вращающейся
системе координат:
 ,
где Y20
- вектор потокосцепления
ротора во вращающейся
системе координат.
Подставив
найденное
значение тока
ротора в третье
уравнение
системы (12), получим:
,
где Y20
- вектор потокосцепления
ротора во вращающейся
системе координат.
Подставив
найденное
значение тока
ротора в третье
уравнение
системы (12), получим:
 .
.
Приняв,
что  - коэффициент
электромагнитной
связи ротора,
- коэффициент
электромагнитной
связи ротора,
 - переходная
индуктивность
ротора, определим
значение тока
статора во
вращающейся
системе координат:
- переходная
индуктивность
ротора, определим
значение тока
статора во
вращающейся
системе координат:
![]() .
Подставляем
найденное
значение тока
статора в первое
уравнение
системы (12):
.
Подставляем
найденное
значение тока
статора в первое
уравнение
системы (12):
 .
.
Откуда,
приняв что  ,
окончательно
получим:
,
окончательно
получим:
 .
(14)
.
(14)
Спроецируем уравнения (13) и (14) на оси d и q вращающейся с частотой поля системы координат, учитывая, что U10 = U10d + j·U10q, Y10 = Y10d + j·Y10q и Y20 = Y20d + j·Y20q:
или преобразовав к нормальной форме Коши:
 (15)
(15)
Уравнение для вращающего момента обобщенной электрической машины, согласно [1], имеет вид:
 ,
,
или перейдя к проекциям на оси d и q:
 (16).
(16).
Все вышеприведенные рассуждения справедливы для обобщенной двухполюсной машины. В случае реальной многополюснолй машины ее необходимо привести к эквивалентной двухполюсной. С этой целью запишем уравнение движения:
![]() ,
,
где w - угловая скорость реальной машины, M' - вращающий момент реальной машины, Mс - механический вращающий момент нагрузки. Перепишем уравнение движения, учитывая, что M’ = p·M и w = W/p, где p - число пар полюсов реальной многополюсной машины:
 .
(17)
.
(17)
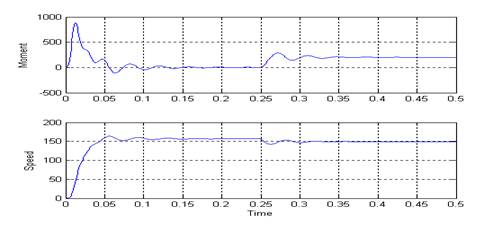
Объединив (15), (16) и (17), получим систему уравнений асинхронного двигателя во вращающейся с частотой поля системе координат:
 (18)
(18)
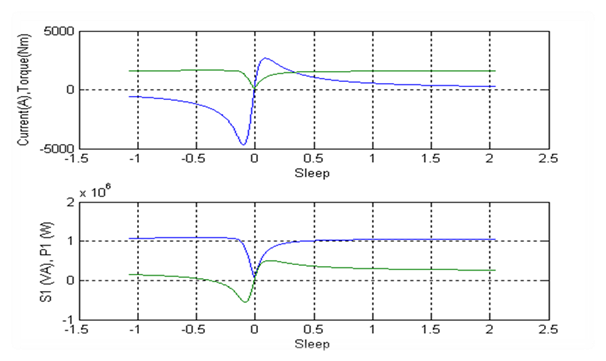
Система уравнений (18) удобна тем, что может быть решена численными методами. Так, задавшись напряжением, статическим моментом и параметрами схемы замещения, можно найти потокосцепления статора и ротора Y10 и Y20, момент М и скорость вращения ротора асинхронной машины w.
3.4 Проектирование робота
3.4.1 Постановка задачи
По заданной кинематической схеме манипулятора и заданному положению выходного звена рассчитать переменные параметры манипулятора, т. е. решить обратную задачу кинематики с использованием матричного метода. Проверку выполнить графическим методом. Размеры звеньев подобрать самостоятельно, шаг изменения размеров 50 мм.
3.4.2 Исходные данные
Положение выходного звена:
X=-250 ; Y=140 ; Z=480
Кинематическая схема манипулятора:
1 0 P 1 1
3.4.3 Основные понятия и определения
Манипулятором называется техническое устройство, предназначенное для воспроизведения некоторых рабочих функций рук человека. Манипулятором называют также исполнительный механизм промышленного робота, оснащенный приводами и рабочим органом, с помощью которого осуществляется выполнение рабочих функций. Способность воспроизводить движения, подобные движениям рук человека, достигается приданием манипулятору нескольких степеней свободы, по которым осуществляется управляемое движение с целью получения заданного движения рабочего органа - схвата.
Числом степеней свободы механической системы называется число возможных перемещений системы.
Твердые тела, входящие в механическую систему манипулятора, называются звеньями. В механике различают входные и выходные звенья. Входным называется звено, которому сообщается движение, преобразуемое механизмом. Выходным называется звено, совершающее рабочее движение.
Таким образом, в манипуляторе число входных звеньев равно числу приводов, а выходное звено, как правило, одно - схват, или рабочий орган.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...

... современным компьютерам, должна стать мощным усилителем мыслительных процессов в образовании. И здесь особая роль отводится преподавателям, которые являются носителями технологии образования и которые должны творчески переосмыслить накопленный интеллектуальный багаж в соответствии с новыми технологическими возможностями. До настоящего времени в российском обществе отсутствует четкое понимание ...
... состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд. 4. Экономическая часть 4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201) Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения ...
0 комментариев