СОСТОЯНИЕ
ВОПРОСА И ПОСТАНОВКА
ЗАДАЧИ
Техническое
описание системы
Анализ
существующих
средств автоматизации
Требования
к системе
Требования
к эксплуатации,
техническому
обслуживанию,
ремонту и хранению
компонентов
системы
Требования
к информационному
обеспечению
Разработка
структурной
схемы
Метод
матриц в кинематике
манипуляторов
Решение
обратной задачи
кинематики
Составление
эскиза процесса
сверления
Интерфейс
последовательного
канала связи
ЭВМ
Расчет
формы сигнала
в линии связи
и
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ
ЧАСТЬ
Технология изготовления платы
ЭКОНОМИЧЕСКАЯ
ЧАСТЬ
Определение
договорной
цены НИР и плановой
прибыли
Напряжение
питания электропаяльника
не должно превышать
36 В, а мощность
не более 40 Вт
Противопожарная
защита
Навигация
Противопожарная защита
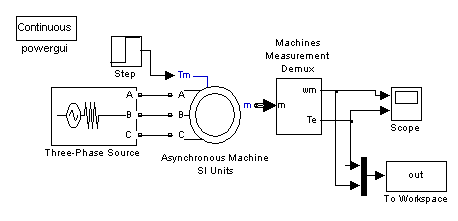
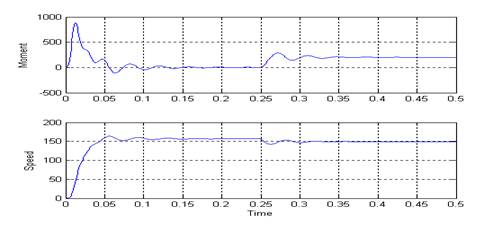
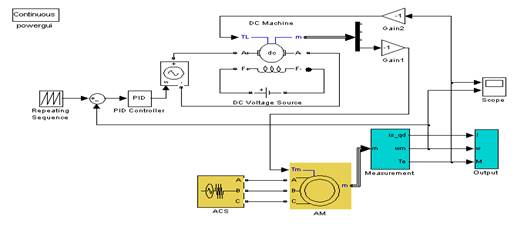
Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
140823
знака
20
таблиц
31
изображение
6.5 Противопожарная защита
Пожары представляют особую опасность, так как сопряжены с большими материальными потерями. Как известно пожар может возникнуть при взаимодействии горючих веществ, окисления и источников зажигания. Горючими компонентами являются: строительные материалы для акустической и эстетической отделки помещений, перегородки, двери, полы, изоляция кабелей и др.
Противопожарная защита - это комплекс организационных и технических мероприятий, направленных на обеспечение безопасности людей, на предотвращение пожара, ограничение его распространения, а также на создание условий для успешного тушения пожара.
Источниками возгорания могут быть электронные схемы от ЭВМ, приборы, применяемые для технического обслуживания, устройства электропитания, кондиционирования воздуха, где в результате различных нарушений образуются перегретые элементы, электрические искры и дуги, способные вызвать загорания горючих материалов.
В современных ЭВМ очень высокая плотность размещения элементов электронных схем. В непосредственной близости друг от друга располагаются соединительные провода, кабели. При протекании по ним электрического тока выделяется значительное количество теплоты. При этом возможно оплавление изоляции. Для отвода избыточной теплоты от ЭВМ служат системы вентиляции и кондиционирования воздуха. При постоянном действии эти системы представляют собой дополнительную пожарную опасность.
Энергоснабжение помещения осуществляется от трансформаторной станции. На трансформаторных подстанциях особую опасность представляют трансформаторы с масляным охлаждением. В связи с этим предпочтение следует отдавать сухим трансформаторам.
Для большинства помещений, где размещены ЭВМ, установлена категория пожарной опасности В.
К средствам тушения пожара, предназначенных для локализации небольших возгораний, относятся пожарные стволы, внутренние пожарные водопроводы, огнетушители, сухой песок, асбестовые одеяла и т. п.
Для тушения пожаров на начальных стадиях широко применяются огнетушители. По виду используемого огнетушащего вещества огнетушители подразделяются на следующие основные группы.
Пенные огнетушители, применяются для тушения горящих жидкостей, различных материалов, конструктивных элементов и оборудования, кроме электрооборудования, находящегося под напряжением.
Газовые огнетушители применяются для тушения жидких и твердых веществ, а также электроустановок, находящихся под напряжением.
В помещениях, где присутствуют ЭВМ применяются главным образом углекислотные огнетушители, достоинством которых является высокая эффективность тушения пожара, сохранность электронного оборудования, диэлектрические свойства углекислого газа, что позволяет использовать эти огнетушители даже в том случае, когда не удается обесточить электроустановку сразу.
Для обнаружения начальной стадии загорания и оповещения службу пожарной охраны используют системы автоматической пожарной сигнализации (АПС). Кроме того, они могут самостоятельно приводить в действие установки пожаротушения, когда пожар еще не достиг больших размеров. Системы АПС состоят из пожарных извещателей, линий связи и приемных пультов (станций).
В соответствии с “Типовыми правилами пожарной безопасности для промышленных предприятий” залы ЭВМ, помещения для внешних запоминающих устройств, подготовки данных, сервисной аппаратуры, архивов, копировально-множительного оборудования и т. п. необходимо оборудовать дымовыми пожарными извещателями. В этих помещениях в начале пожара при горении различных пластмассовых, изоляционных материалов и бумажных изделий выделяется значительное количество дыма и мало теплоты.
SUMMARY
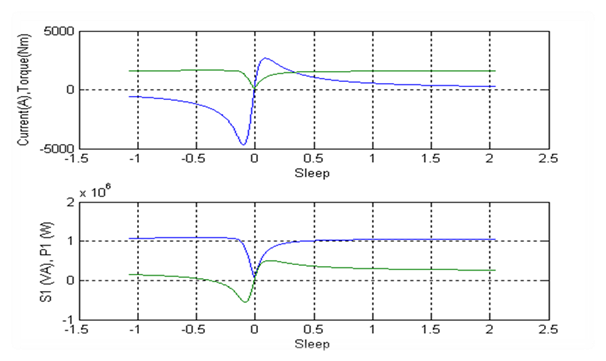
The electric drives for such machinery as pumps, compressors, conveyers, etc. occupy the intermediate position between the high dynamic and low dynamic drives. The existing automatic control systems do not satisfy with all requirements presented to such drives. Therefore it is proposed the alternating current electric drive with improved power parameters.
Principles of the work of the alternating current electric drive with improved power parameters is based on the maintenance of a constant corner between generalized vectors of the stator current and rotor flux that provides work of an engine in the field of nominal mode with the maximum values of efficiency and capacity factor (cos j).
Induction Motor Automatic Control System is intended for regulation of rotor speed by change of voltage and stator field frequency values. In comparison with existing AC electric drives the designed system has the number of advantages: absence of mechanical gauges (tachometers, position detectors, etc.) makes the system cheaper, increases its reliability and improves the dynamic characteristics; the regulation of phase flux values in function from load permits to obtain essential economy of the electric power (especially when motor works in the range of small loads); the maintenance of relative sliding constancy permits to obtain the hard mechanical characteristics.
СПИСОК ЛИТЕРАТУРЫ
К.П.Ковач, И.Рац. Переходные процессы в машинах переменного тока. М. - Л.: Госэнергоиздат, 1963, 744 стр.
Эпштейн И. И. Автоматизированный электропривод переменного тока. - М.: Энергоиздат, 1982 - 192 c., ил.
Шипачев В.С. Высшая математика: Учеб. для немат. спец. вузов / Под ред. акад. А. Н. Тихонова. - 2 - е изд., стер. - М.: Высш. шк., 1990. - 479 с., ил.
Асинхронные двигатели серии 4А: Справочник / А. Э. Кравчик, М. М. Шлаф, В. И. Афонин, Е. А. Соболенская. - М.: Энергоиздат, 1982. - 504 с., ил.
В. Л. Грузов, Ю. А. Сабинин. Асинхронные маломощные приводы со статическими преобразователями. Л.: "Энергия", 1970, 136 с.
Turbo Pascal Version 5.5 Object - Oriented Programming Guide. -Borland International, 1989
Dutton F. Turbo Pascal Toolbox. - SYBEX, 1988
Токарев Б. Ф. Электрические машины. Учеб. пособие для вузов. - М: Энергоатомиздат, 1990: - 642 с.: ил.
Цифровые и аналоговые интегральные микросхемы: Справочник / С. В. Якубовский, Л. И. Ниссельсон, В. И. Кулешова и др.; Под ред. С. В. Якубовского. - М.: Радио и связь, 1989. - 496 с.: ил.
Полупроводниковые БИС запоминающих устройств. Под ред. А. Ю. Гордонова и Ю. А. Дьякова. - М.: Радио и связь, 1986. - 360 с.
Булгаков А. А. Частотное управление асинхронным двигателем - М.: Энергоиздат, 1982. - 216 c.
Бойко В.А., Голинько В. И., Фрундин В. Е. Методические указания по выполнению раздела "Охрана труда и окружащей среды" в дипломных проектах студентов специальностей 0303, 0606, 0628 /ДГИ. - Днепропетровск, 1986. - 50 с.
Ю.Г.Сибаров, Н.Н.Сколотнев. Охрана труда в вычислительных центрах. - М: Машиностроение, 1985
Липаев В.В., Потапов А. И. Оценка затрат на разработку программных средств. - М.: Финансы и статистика, 1988. - 224 c.: ил.
Боэм Б. У. Инженерное проектирование программного обеспечения.: Пер. с англ. - М.: Радио и связь. 1985. - 512 c.
Методические указания по составлению экономической части дипломного проекта для студентов специальностей "Автоматика и управление в технических системах" (21.01) и "Электропривод и автоматизация промышленных установок и технологических комплексов" (21.05) / Сост.: В. Д. Тулупий, А. В. Давидайтис, И. В. Шереметьева. - Днепропетровск: ДГИ, 1992. - 52 c.
Сандлер А. С., Гусяцкий Ю. М. Тиристорные инверторы с широтно - импульсной модуляцией. - .: Энергия, 1968 - 96 с.
Кривицкий С. О., Эпштейн И. И. Динамика частотно - регулируемых электроприводов с автономными инверторами. - М.: Энергия, 1970. - 150 c.
ПРИЛОЖЕНИЯ
| Обозначение | Наименование | Примечание |
| документация | ||
| Текст программы | Текст программы с комментариями | |
| Описание программы | Описание, назначение и характеристика программы | |
| Руководство оператора |
{ИСХОДНЫЙ ТЕКСТ ПРОГРАММЫ IM_Main.PAS}
{$IFDEF CPU87} {$N+} {$ELSE} {$N-} {$ENDIF}
{ Программа расчета векторной диаграммы асинхронного двигателя }
program lw(lw);
uses crt,dos,graph,im_tpu;
const {Параметры "Г-образной схемы замещения}
p=2; {Число полюсов}
P2n=75; {Номинальная мощность, кВт}
U1n=220; {Номинальное фазное напряжение, В}
KPDn=0.925; {Номинальный КПД}
Cosn=0.89; {Номинальный Cos(f)}
Sn=0.016; {Номинальное относительное скольжение, о.е.}
Smax=0.1; {Критическое относительное скольжение, о.е.}
J=0.6; {Момент инерции ротора, кг*м^2}
X0=4.6; {Сопротивление взаимоиндукции, о.е.}
R1=0.037; {Активное сопротивление статора, о.е.}
X1=0.1; {Индуктивное сопротивление статора, о.е.}
R2=0.017; {Активное сопротивление ротора, о.е.}
X2=0.16; {Индуктивное сопротивление ротора, о.е.}
R2p=0.036; {Пусковое сопротивление ротора, о.е.}
Mn=9550*P2n/(3e3/p*(1-Sn));{Номинальный момент, н*м}
Mmin=1*Mn; {Значение минимального момента, н*м}
Mmax=2.5*Mn; {Значение критического момента, н*м}
type StringSwitche=(ST11,ST12,ST13,ST14,ST15,ST16,ST17,DATA1,DATA2,
ST21,ST22,ST23,ST24,ST25,ENDT1,ENDT2);
var t,dt,U1a,U1b,M,A1,A2,K1,K2,L11,L21,L1,L2,L0,W1,EndT,SpeedScale,
I0a,I0b,I1a,I1b,I21a,I21b,KPD,CosF,I1,I21,W0,Psi1,Psi2,Psi0,s,I0,
I1n,X1t,R1t,X0t,R2t,X2t,R2pt,Smin:real;
RepeatNumber,CurrentNumber,CurrentRepeat,i,k,Ms,Uss,PsiAlpha,IsAlpha,
IsPsirAlpha,PsisRAngle,UssAbsoluteAngle,PsirRAngle,IsRAngle,IrsRAngle,
PsioRAngle,Fs:integer;
x,f,h,f1,f2,f3,f4:array[1..5] of real;
StringKPD,StringPsiAlpha,StringIsAlpha,StringIsPsirAlpha,StringCurrW,
StringAlphaRasch,StringIs,StringCosF, VectorString,VectorString0:string;
color:word;
Result:text;
{Пересчет паспортных данных в абсолютные единицы "Т"-образной схемы}
procedure ReCalculation;
var b:real;
begin
I1n:=P2n*1e3/(3*U1n*Cosn*KPDn); {Номинальный фазный ток}
X1t:=2*X1*X0/(X0+Sqrt(Sqr(X0)+4*X1*X0))*U1n/I1n;
R1t:=R1*X1t/X1; {Сопротивления статора, Ом}
X0t:=X0*U1n/I1n;{Сопротивление взаимоиндукции, Ом}
R2t:=R2*U1n/I1n;
X2t:=X2*U1n/I1n;{Сопротивления ротора, Ом}
R2pt:=R2p*U1n/I1n;
b:=R1/R2*Smax;
Smin:=Smax/Mmin*((1+b)*Mmax-b*Mmin+SqRt((1+b)*(Mmax-Mmin)*((1-b)*Mmin+(1+b)*Mmax)));
end;
{ Дифференциальные уравнения АД в двухфазной системе
координат (a,b), неподвижной относительно статора }
procedure Right_Part;
begin
if s>smin then A2:=(R2t+(R2pt-R2t)*(S-Smin)/(1-Smin))/L21
else A2:=R2t/L21;
U1a:=Uss*cos(W1*t);
U1b:=Uss*sin(W1*t);
f[1]:=U1a-A1*x[1]+A1*K2*x[3];
f[2]:=U1b-A1*x[2]+A1*K2*x[4];
f[3]:=A2*(K1*x[1]-x[3])-x[5]*x[4];
f[4]:=A2*(K1*x[2]-x[4])+x[5]*x[3];
M:=3/2*p*L0/(L1*L11)*(x[2]*x[3]-x[1]*x[4]);
f[5]:=p/J*(M-Ms);
S:=(W1-x[5])/W1;
end;
{ Модифицированный метод Рунге-Кутта 4-го порядка }
procedure Runge;
begin
for k:=1 to 5 do h[k]:=x[k];
Right_Part;
for k:=1 to 5 do
begin
f1[k]:=f[k];
x[k]:=h[k]+f1[k]*dt/2;
end;
Right_Part;
for k:=1 to 5 do
begin
f2[k]:=f[k];
x[k]:=h[k]+f2[k]*dt/2;
end;
Right_Part;
for k:=1 to 5 do
begin
f3[k]:=f[k];
x[k]:=h[k]+f3[k]*dt;
end;
Right_Part;
for k:=1 to 5 do
begin
f4[k]:=f[k];
x[k]:=h[k]+(f1[k]+2*f2[k]+2*f3[k]+f4[k])/6*dt;
end;
end;
{ Инициализация графики }
procedure Init_Graph;
var GraphDriver,GraphMode:integer;
i:integer;
color:word;
begin
GraphDriver:=0;
DetectGraph(GraphDriver,GraphMode);
if GraphMode>1 then GraphMode:=1;
InitGraph(GraphDriver,GraphMode,'e:\tp\bgi');
color:=GetMaxColor;
TextMode(1);
Writeln;
Writeln(' Graph Initialisate And ',GraphErrorMsg(GraphResult));
Writeln;
Writeln(' Use: GraphMode - ',GetModeName(GraphMode));
Writeln(' GraphDriver - ',GetDriverName);
Writeln;
Writeln(' The Number Of Using Colors :',GetMaxColor);
for i:=1 to 4 do Writeln;
Writeln(' Параметры АД:');
Writeln;
Writeln(' As =',A1:6,' Ar =',A2:6);
Writeln(' Ks =',K1:6,' Kr =',K2:6);
Writeln(' Ls`=',L11:6,' Lr`=',L21:6);
for i:=1 to 7 do Writeln;
Writeln(' Press Any Key To Continue');
pausa;
SetGraphMode(GraphMode);
end;
{ Процедура подготовки к цифровому моделированию
по паспортным данным двигателя }
procedure Prepeare;
var HelpVariable:integer;
begin
W1:=2*Pi*Fs;W0:=W1/p;
L0:=1.5*X0t/W1;L1:=X1t/W1;L2:=X2t/W1;
L1:=L1+L0;L2:=L2+L0;
K2:=L0/L2;K1:=L0/L1;
L11:=L1-sqr(L0)/L2;L21:=L2-sqr(L0)/L1;
A1:=R1t/L11;A2:=R2t/L21;
for HelpVariable:=1 to 5 do
begin
f[HelpVariable]:=0;
x[HelpVariable]:=0;
end;
end;
{ Процедура расчета угов векторов }
procedure AngleDefinition;
begin
UssAbsoluteAngle:=AbsoluteAngle(U1a,U1b);
PsisRAngle:=AbsoluteAngle(x[1],x[2])-UssAbsoluteAngle;
if PsisRAngle
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...

... современным компьютерам, должна стать мощным усилителем мыслительных процессов в образовании. И здесь особая роль отводится преподавателям, которые являются носителями технологии образования и которые должны творчески переосмыслить накопленный интеллектуальный багаж в соответствии с новыми технологическими возможностями. До настоящего времени в российском обществе отсутствует четкое понимание ...
... состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд. 4. Экономическая часть 4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201) Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения ...
0 комментариев