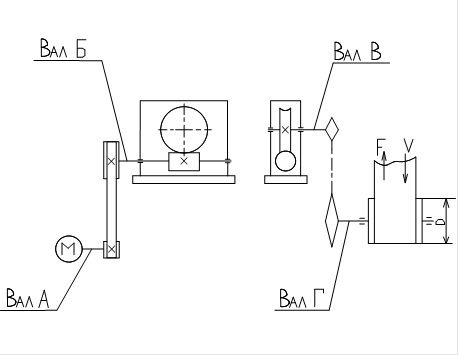
Кинематический анализ схемы привода
Мощности на валах
Выбор материала
Скорость относительного скольжения в полюсе зацепления, м/с
Геометрический расчет передачи
Расчет червяка на жесткость
Подбор подшипников для вала червячного колеса
Конструирование стакана и крышек подшипников
Назначение опасных сечений
Назначение опасных сечений
Подшипники для выходного вала
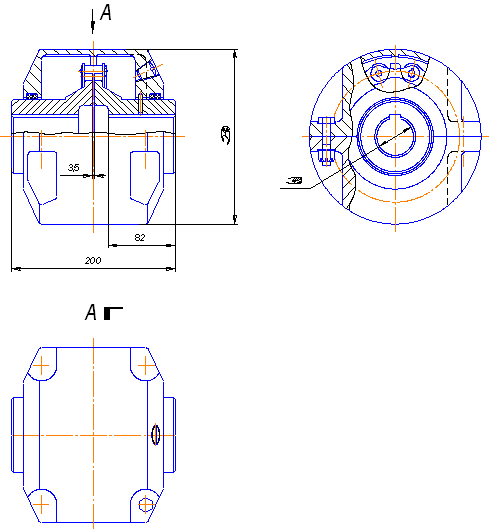
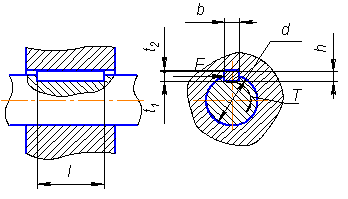
Соединение вала с муфтой
Выбор муфты для выходного вала
Навигация
Скорость относительного скольжения в полюсе зацепления, м/с
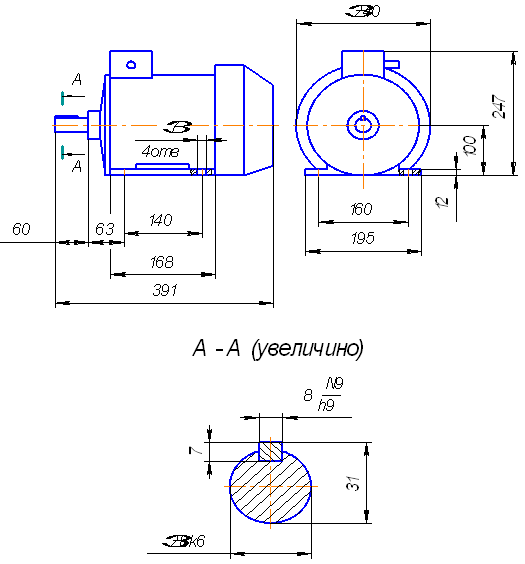
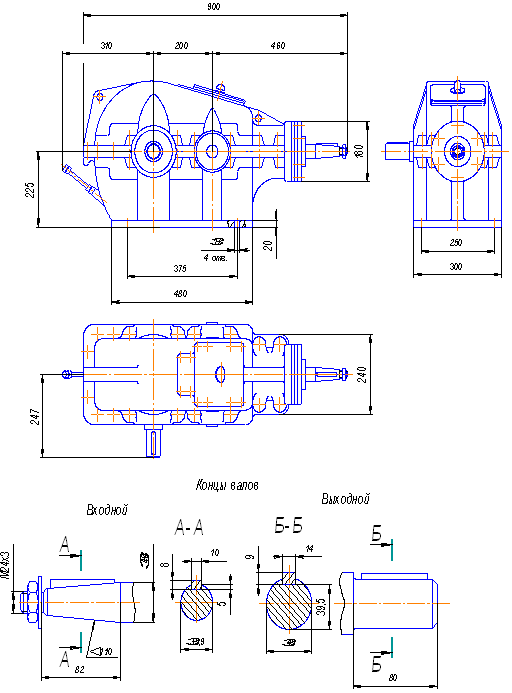
Привод ленточного конвейера. Червячный редуктор.
36159
знаков
12
таблиц
3
изображения
2.10.2. Скорость относительного скольжения в полюсе зацепления, м/с.
![]()
где d1 = m×q = 5.0×10 = 50 (мм)
2.10.3. По скорости скольжения VS выбираем (по таблице 29 [2]) степень точности передачи (8 степень) и определяем коэффициент динамической нагрузки KV=1.25
2.10.4. Коэффициент неравномерности нагрузки.
![]()
 |
где q - коэффициент деформации червяка, определяемый по таблице 30 [2] в зависимости от q и Z1, равный 108
Ti и ti – вращающий момент и время его действия на i-той ступени по гистограмме нагружения;
Т2ср – среднее значение вращающего момента на валу червячного колеса;
Т2max– максимальный из числа длительно действующих вращающих моментов.
Т2max = 284.461 (Н×м)
 |
Тогда коэффициент неравномерности нагрузки равен:
2.10.5. Расчетные контактные напряжения.
 |
2.11. Проверочный расчет по напряжениям изгиба.
2.11.1. Эквивалентное число зубьев колеса.
![]()

![]()
2.11.2. Коэффициент формы зуба колеса выбираем по таблице 31 [2] :
![]()
![]()
2.11.3. Напряжения изгиба в зубьях червячного колеса.
![]()

[sF]2=0.25sT+0.08sB – допускаемые напряжения для всех марок бронз, значения sT и sB приведены в таблице 26 [2]
[sF]2=0.25×245+0.08×530=103.65 (МПа)
Условие прочности выполняется, так как sF2<[sF]2, следовательно, m и q были нами выбраны верно.
2.12. Проверочные расчеты по пиковым нагрузкам.
2.12.1. Проведем проверку по пиковым контактным напряжениям во избежание деформации и заедания поверхностей зубьев.
Условие прочности имеет вид:
|
где [sH]max=2×sT – предел прочности для безоловянистых бронз, [sH]max=2×245=490(МПа)
sH2max<[sH]max, следовательно, условие прочности по пиковым контактным напряжениям выполняется.
2.12.2. Пиковые напряжения изгиба.
Условие прочности по пиковым напряжениям изгиба:
![]()
[sF2]max= 0.8×sT= 0.8×245 = 196 (МПа)
sF2max<[sF2]max, следовательно, условие прочности по пиковым напряжениям изгиба выполняется.
Похожие работы

... , рад/с 3.6 Определяем общее передаточное отношение Из рекомендаций [1, c. 7] принимаем передаточное отношение редуктора Uред = 8; цепной передачи передачи Uц = 3 ; ременной передачи Uр = 2,115. Проверка выполнена 3.7 Определяем результаты кинематических расчетов на валах Вал А: Частота вращения вала об/мин Угловая скорость рад/с Мощность на валу кВт Крутящий момент Н м ...


... ω2 = π× n2/30 = 3,14×695,33/30 = 72,78 с-1; (13) ω3 = π × n 3/30 = 3,14× 17,38/30 = 1,82 с-1; (14) ω4 = ω3 = 1,82 с-1 (15) Определение мощностей, передаваемых валами привода р1 = р × η3 × η4 (16) где Р - номинальная мощность требуемого электродвигателя, р =1,7кВт; η3 - КПД подшипников качения, η3 =0,995 ...
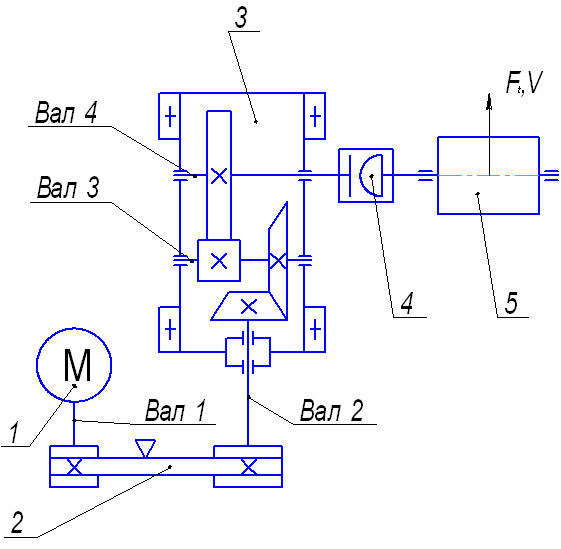
... : 1.3 Определение частоты вращения вала исполнительного механизма и двигателя Частота n4, мин-1, вращения вала: гдеD - диаметр барабана ленточного конвейера, мм; Рисунок 1 - Кинематическая схема привода ленточного конвейера: 1 - электродвигатель; 2 - ременная передача; 3 - двухступенчатый коническо-цилиндрический редуктор; 4 - компенсирующая муфта; 5 - узел барабана. ...
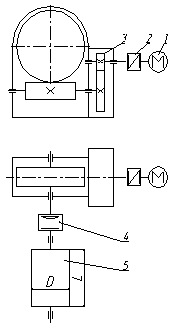
ной скорости V=0.18 м/с и диаметре барабана D=400 мм. Кинематический анализ схемы привода. Привод состоит из электродвигателя, одноступенчатого червячного редуктора и приводного барабана. Червячная передача служит для передачи мощности от первого (I) вала ко второму (II). При передаче мощности имеют место ее потери на преодоление сил вредного сопротивления. Такие сопротивления имеют место и в ...
0 комментариев