Навигация
Выпускная квалификационная работа
Выполнила студентка V курса математического факультета Кощеева Анна Сергеевна
Вятский Государственный Гуманитарный университет (ВятГГУ)
Киров 2005
Введение
Функциональный анализ – мощное средство для решения математический задач, возникающих в реальных ситуациях, он имеет множество приложений в различных областях математики, его методы проникают в смежные технические дисциплины.
Многие задачи математической физики, теории упругости, гидродинамики сводятся к отысканию решения дифференциального линейного уравнения, что, в свою очередь, приводит к задаче отыскания решения уравнения Аx = y с линейным оператором А. В данной работе рассмотрены два метода решения операторных уравнений.
Цель данной работы: рассмотреть основы теории линейных операторов и методы решения операторных уравнений – метод малого параметра и метод продолжения по параметру, показать применение этих методов к решению задач.
Изучив имеющийся материал по данной теме, я поставила перед собой следующие задачи:
раскрыть некоторые основы теории линейных операторов, необходимые для освоения методов решения операторных уравнений;
проиллюстрировать на конкретных примерах способы решения операторных уравнений и дать пояснения по ходу решения конкретных задач.
Так как выделение из функционального анализа его прикладной части, содержащей конструктивные методы получения решений задач, преследует методическую цель – сделать эти методы доступнее тем, кто занимается приложениями математики. Поэтому данная работа разделена на две главы, в первой содержатся необходимые теоретические обоснования способов решения операторных уравнений и суть обоих методов, а во второй – решения конкретных задач.
Глава 1. Операторные уравнения
§1.Определение линейного оператора
Пусть X и Y – линейные пространства, оба вещественные или оба комплексные.
Оператор А: X → Y с областью определения D(А) называется линейным, если
А(λ1x1 + λ2x2) = λ1А(x1) + λ2А(x2)
для любых x1,x2 Î D и любых скаляров λ1 и λ2.
Пусть X и Y – нормированные пространства и А: X → Y, где А – линейный оператор, всюду заданный в X (т.е. D(А) = X).
Оператор А называется непрерывным в точке x0 Î X, если Аx → Аx0 при x → x0. Но судить о непрерывности линейного оператора в различных точках x0 Î X можно по непрерывности его в нуле пространства X.
Теорема 1. Пусть линейный оператор А всюду задан в банаховом пространстве X и со значениями в банаховом пространстве Y непрерывен в точке 0 Î X; тогда А непрерывен в любой точке x0 Î X.
Доказательство. Рассмотрим равенство Аx – Аx0 = А (x – x0). Если x → x0, то z = x – x0 → 0. По непрерывности в нуле Аz → 0, но тогда Аx – Аx0 → 0, что и требовалось доказать.
Линейный оператор А называется непрерывным, если он непрерывен в точке x = 0.
Пусть S1(0) – замкнутый шар ||x|| ≤ 1 в банаховом пространстве X.
Будем называть линейный оператор А: X → Y ограниченным, если он ограничен на единичным шаре S1(0), т.е. если ограничено множество
{ ||Аx||, ||x|| ≤ 1}.
Согласно определению, если А ограничен, то существует постоянная с > 0 такая, что для любых x с ||x|| ≤ 1 справедливо неравенство
||Аx|| ≤ с (1)
Теорема 2. А ограничен тогда и только тогда, когда справедлива оценка
||Аx|| ≤ с ||x|| (2)
для любых x Î X, где с – постоянная.
Теорема 3. Пусть А: X → Y, А – линейный оператор, X, Y – банаховы пространства. Для того чтобы А был непрерывным, необходимо и достаточно, чтобы он был ограниченным.
§2. Норма линейного оператора
В линейном пространстве непрерывных линейных операторов зададим норму следующим образом:
![]() . (1)
. (1)
Поясним, почему существует конечное число ||А||, определяемое для любого ограниченного оператора равенством (1). Так как А – ограничен, то множество
![]()
ограничено сверху. По теореме о верхней грани существует ![]() .
.
Из свойства sup M следует, что ||Аx|| ≤ ||А|| для всех x Î S1(0). Отсюда
||Аx|| ≤ ||А|| ||x||, (2)
справедливое для всех x Î X, включая x = 0. таким образом, ||А|| является наименьшей из констант в неравенстве ||Аx|| ≤ ||А||, и, значит, оценка (2) является наилучшей.
Пространство нормированных непрерывных линейных операторов, действующих из X в Y, будем обозначать L(X, Y).
§3.Обратные операторы
Системы линейных алгебраических уравнений, интегральные уравнения, а также различные задачи для обыкновенных дифференциальных уравнений и уравнений с производными часто могут быть записаны в виде линейного уравнения
![]()
Если существует обратный оператор ![]() , то решение задачи записывается в явном виде:
, то решение задачи записывается в явном виде:
![]()
Важное значение приобретает теперь выявление условий, при выполнении которых обратный оператор существует и обладает теми или иными свойствами.
Пусть задан линейный оператор: А: X → Y, где X,Y – линейные пространства, причем его область определения D(A)![]() X, а область значений R(A)
X, а область значений R(A)![]() Y.
Y.
Введем множество ![]() - множество нулей оператора А. заметим, что N(A) не пусто, так как 0 Î N(A)
- множество нулей оператора А. заметим, что N(A) не пусто, так как 0 Î N(A)
Теорема 4. Оператор А переводит D (А) в R (А) взаимно однозначно тогда и только тогда, когда N(A)=![]() , (т.е. множество А нулей состоит только из элемента 0)
, (т.е. множество А нулей состоит только из элемента 0)
Теорема 5. Оператор А-1 существует и ограничен на R(A) тогда и только тогда, когда для некоторой постоянной m>0 и любого x Î D(A) выполняется неравенство
![]() . (1)
. (1)
Введем теперь следующее важное понятие.
Будем говорить, что линейный оператор А: X → Y непрерывно обратим, если R(A)=Y , оператор обратим и A-1 Î L(Y, X), (т.е. ограничен).
Обращаясь к теореме 5, мы сможем сформулировать следующее утверждение.
Теорема 6. Оператор А непрерывно обратим тогда и только тогда, когда R(A)=Y и для некоторой постоянной m>0 и для всех ![]() выполняется неравенство (1).
выполняется неравенство (1).
В случае определенного и ограниченного на всем множестве оператора A Î L(X,Y) имеется теорема Банаха об обратном операторе.
Теорема 7. Если А – ограниченный линейный оператор, отображающий взаимно однозначно банахово пространство X на банахово пространство Y, то обратный оператор А-1 ограничен.
Иными словами, если А Î L(X,Y), где X и Y банаховы, R(A)=Y и А обратим, то А непрерывно обратим.
Взглянем на понятие непрерывно обратимого оператора с точки зрения разрешимости линейного уравнения
Ax = y (2)
Если А непрерывно обратим, то уравнение это имеет единственное решение x = A-1y для любой правой части у. Если при этом ![]() (решение того же уравнения с правой частью
(решение того же уравнения с правой частью ![]() ), то
), то ![]() . Это означает, что малое изменение правой части y влечет малое изменение решения, или, как принято говорить, задача (2) корректно разрешима.
. Это означает, что малое изменение правой части y влечет малое изменение решения, или, как принято говорить, задача (2) корректно разрешима.
Пусть А Î L(X,Y). Оператор U Î L(X,Y) будем называть правым обратным к А, если AU = Iy. Оператор V Î L(X,Y) будем называть левым обратным к А, если VA = Ix.
Здесь через Iy (Ix) обозначен тождественный оператор в пространстве Y (X). Ниже для правого обратного к А используем обозначение Аr–1, а для левого – АL–1.
Лемма 1. Если существует правый обратный Аr–1 к А, то уравнение (2) имеет решение
x = Аr–1 y
Если существует левый обратный оператор к А, то уравнение (2) может иметь не более одного решения.
Доказательство.
А(Аr–1 y) = (А Аr–1)y = y,
т.е. x = Аr–1 y обращает (2) в тождество и, значит, является решением.
Далее, пусть существует АL–1. рассмотрим N(A). Пусть x Î N(A), тогда Аx = 0. применим к этому равенству оператор АL–1, тогда АL–1Аx = 0, откуда x = 0. итак, всякое x Î N(A) оказывается равным 0. Значит, N(A) = {0} и, по теореме 4, А взаимно однозначен, т.е. для уравнения (2) справедлива теорема единственности. Что и требовалось доказать.
Пусть X – банахово пространство. Рассмотрим банахово пространство L(X) – пространство линейных, ограниченных и заданных на всем множестве операторов. Пусть I – тождественный оператор в L(X). Очевидно, что I непрерывно обратим. Ниже доказывается, что вместе с I непрерывно обратимы все операторы ![]() - единичного шара в L(X), т.е. все такие А, для которых справедливо неравенство
- единичного шара в L(X), т.е. все такие А, для которых справедливо неравенство ![]() .
.
Для краткости положим C = I – A. Ниже мы будем ссылаться на признак Вейерштрасса: пусть X – банахово пространство, тогда всякий абсолютно сходящийся в X ряд сходится.
Теорема 8. Пусть ![]() и
и ![]() ; тогда оператор I – C непрерывно обратим. При этом справедливы оценки
; тогда оператор I – C непрерывно обратим. При этом справедливы оценки
![]() (1)
(1)
![]() (2)
(2)
Доказательство. Рассмотрим в L(X) ряд
I+C+C2+C3+… (3)
Так как ![]() , то ряд (3) оценивается сходящимся числовым рядом – геометрической прогрессией
, то ряд (3) оценивается сходящимся числовым рядом – геометрической прогрессией
![]()
По признаку Вейерштрасса ряд (3) сходится равномерно, т.е.
![]() .
.
Где S – сумма ряда (3). Далее простой проверкой убеждаемся, что
![]() ,
,
![]() .
.
Но при этом ![]() (ибо
(ибо ![]() и
и ![]() ), а
), а ![]() . Поэтому, в пределе имеем равенства (I – C)S = I и S(I – C) = I. По лемме 1 отсюда заключаем, что I – C непрерывно обратим и S=(I – C)-1. Далее,
. Поэтому, в пределе имеем равенства (I – C)S = I и S(I – C) = I. По лемме 1 отсюда заключаем, что I – C непрерывно обратим и S=(I – C)-1. Далее,
 ,
,
 .
.
Переходя в этих неравенствах к пределу при ![]() , получаем оценки (1) и (2). Теорема доказана.
, получаем оценки (1) и (2). Теорема доказана.
Теперь рассмотрим более общий случай пространства L(X,Y). Пусть А Î L(X,Y) непрерывно обратим.
Теорема 9. Пусть A, B Î L(X,Y), А непрерывно обратим и выполнено неравенство ![]() . Тогда B непрерывно обратим и справедливы оценки
. Тогда B непрерывно обратим и справедливы оценки
 ,
,  .
.
§4. Абстрактные функции
Пусть S – некоторое множество на числовой оси или в комплексной плоскости, а X – нормированное пространство.
Рассмотрим функцию x(![]() ) с областью определения S и с областью значений в X. Такие функции принято называть абстрактными функциями числовой переменной или векторными функциями числовой переменной, поскольку элементы линейного (иначе – векторного) пространства мы называем также векторами. На абстрактные функции числовой переменной переносятся многие понятия и факты математического анализа. Далее рассмотрим сведения о пределах и непрерывности таких функций, о разложении в степенные ряды, а также понятие аналитической абстрактной функции.
) с областью определения S и с областью значений в X. Такие функции принято называть абстрактными функциями числовой переменной или векторными функциями числовой переменной, поскольку элементы линейного (иначе – векторного) пространства мы называем также векторами. На абстрактные функции числовой переменной переносятся многие понятия и факты математического анализа. Далее рассмотрим сведения о пределах и непрерывности таких функций, о разложении в степенные ряды, а также понятие аналитической абстрактной функции.
Пусть x(![]() ) определена в окрестности точки
) определена в окрестности точки ![]() 0, за исключением, быть может, самой точки
0, за исключением, быть может, самой точки ![]() 0. Элемент а Î X будем называть пределом функции x(
0. Элемент а Î X будем называть пределом функции x(![]() ) при
) при ![]() →
→
Похожие работы
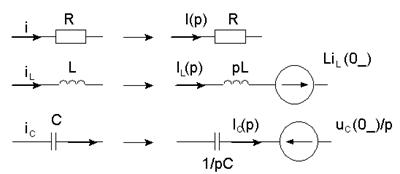
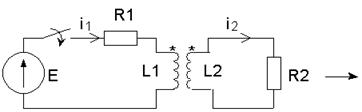
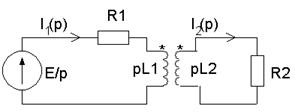
... математических методов, связанных с описанием и анализом типичных явлений, протекающих именно в электротехнических устройствах. 1 Применение преобразования Лапласа и его свойств к расчету переходных процессов Этот метод основан на преобразовании Лапласа. Пусть f(t) – оригинал, а F(p) – изображение этого оригинала по Лапласу. Для сокращения применяют такие обозначения: f(t)F(p), F(p)= Прямое ...


... лишь угловую часть лапласиана и имеет вид: . (6.23) Уравнение Лежандра, встречается в нескольких фундаментальных задачах: 1) в задаче о квантовых состояниях и энергетических уровнях ротатора - линейной молекулы, свободно вращающейся вокруг центра массы. 2) в уравнении Шрёдингера для атома H и водородоподобных ионов. 6.7.3. Уравнение Лежандра это вполне типичное операторное уравнение на
... плотность тока вероятности .(1.9) Из (1.9) следует, что j = 0 для всех функций , у которых функция Ф не зависит от координат. В частности, j= 0 для всех действительных функций . Решения уравнения Шредингера (1.1) в общем случае изображаются комплексными функциями. Использование комплексных функций весьма удобно, хотя и не необходимо. Вместо одной комплексной функции состояние системы можно ...
... популяции обязательно вырождаются, причем независимо от начального распределения особей по возрасту. В завершение рассмотрим пример. Одной из классических моделей динамики популяций является так называемая логистическая модель или модель Ферхюльста, которая описывается дифференциальным уравнением с начальным условием , где , см., например, [5, c. 14]. Если учитывать ограниченность времени жизни ...
0 комментариев