Классы моделей
Способы построения моделей
Особенности структурных моделей систем управления
Построение временных характеристик
Построение частотных характеристик
Построение моделей вход-выход по уравнениям в форме пространства состояний
Типовые звенья автоматических систем управления
Характеристики систем с типовой структурой
Неопределенность моделей систем управления
Динамические нелинейные элементы
Навигация
Динамические нелинейные элементы
Математическое моделирование и расчет систем управления техническими объектами
68359
знаков
14
таблиц
22
изображения
3.2 Динамические нелинейные элементы
В общем случае дифференциальные уравнения, описывающие элементы систем или сами системы, являются нелинейными:
![]() (71)
(71)
Иногда они разрешаются относительно старшей производной переменной выхода:
![]() (72)
(72)
Примерами служат дифференциальные уравнения математического маятника ![]() и уравнение Ван дер Поля:
и уравнение Ван дер Поля:
![]()
Часто дифференциальные уравнения представляются в форме Коши:
 (73)
(73)
где n – вектор переменных состояния; j – вектор-функция; y – функция выхода. В уравнениях (71)-(73) предполагается, что нелинейные функции заданы аналитически.
Временная характеристика динамического линейного элемента – функция веса w(t) позволяет связывать переменные входа и выхода с помощью интеграла свертки. В линейных динамических элементах условия преобразования сигналов определялись лишь частотным спектром сигнала и не зависели от его уровня. Преобразование сигналов динамическими НЭ в значительной степени зависит как от уровней сигналов, так и от их частотных спектров.
3.3 Нелинейные модели с раскрытой структурой
| ||||||||||||||
Во многих случаях нелинейные модели появляются в результате дополнения линейных моделей нелинейными элементами, учитывающими такие естественные факторы, как ограниченность управляющих воздействий, наличие зоны нечувствительности в измерительных и исполнительных элементах, люфтов в кинематических сочленениях или искусственное введение нелинейностей в алгоритмы управления для получения свойств, недостижимых в линейных системах.
Простейший пример такой модели – нелинейный интегратор dy/dt = F(x) структурно изображается как последовательное соединение безынерционного НЭ и линейного интегрирующего звена (рис.28). На рис.29, а изображен другой пример – модель системы с обратной связью в форме структурной схемы, а на рис.29, б та же модель представлена в форме сигнального графа, одна из дуг которой помечена двумя штрихами, указывающими на нелинейный характер преобразования сигнала.
| |
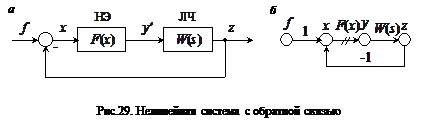
В этих примерах разделены динамическая линейная часть и безынерционная нелинейность: нелинейные эффекты сосредоточены в безынерционном, а динамические – в линейном элементах.
4. Примеры математических моделей объектов горной электромеханики
Модель асинхронного электропривода резания угледобывающего комбайна
Уравнение моментов:
![]()
где
![]()
![]()
![]()
Jэд – момент инерции ротора и приведенных к нему вращающихся частей; w – угловая частота тока в сети; s – скольжение двигателя; p – число пар полюсов электродвигателя; Qт – теоретическая производительность гидронасоса; Pо – давление в гидросистеме; wн – угловая скорость насоса (равная угловой скорости электродвигателя); Мо – момент резания при толщине срезаемой стружки h = 0; а¢ – коэффициент, зависящий от крепости разрушаемого угля.
Скольжение двигателя для устойчивой части механической характеристики приближенно можно определить по формуле
![]()
где sк, Мк – соответственно критическое скольжение и критический момент электродвигателя.
Окончательно получим
![]()
где
![]() ;
; ![]()
Модель системы регулирования нагрузки на электропривод угледобывающего комбайна в зависимости от скорости подачи
Уравнение относительно момента сил сопротивления резанию в направлении подачи имеет вид:
![]()
где t – время пробега резцом расстояния между соседними резцами одной линии резания; ![]() – скорость подачи резца.
– скорость подачи резца.
Модель управления скоростью вращения вала электродвигателя постоянного тока шахтной подъемной установки
Уравнение относительно скорости вращения W:
![]()
где Тэд = L/R – электромагнитная постоянная двигателя; Тм = JR/cecм – электромеханическая постоянная двигателя; kд = 1/сe – коэффициент усиления двигателя по управляющему воздействию; ![]() = R/cecм – коэффициент усиления двигателя по нагрузке; Uвх – напряжение якоря электродвигателя; W – частота вращения ротора; Мс – момент нагрузки на валу электродвигателя.
= R/cecм – коэффициент усиления двигателя по нагрузке; Uвх – напряжение якоря электродвигателя; W – частота вращения ротора; Мс – момент нагрузки на валу электродвигателя.
Передаточная функция по нагрузке (возмущению):
![]()
Заключение
Достоверную математическую модель объекта можно найти аналитическим путем. Для этого необходимо располагать всесторонними сведениями об объекте (конструкции, законах, описывающих протекающие в нем процессы, условиях функционирования и взаимодействия со средой). Однако часто из-за отсутствия достаточных данных получить решение задачи таким путем не удается. Трудности применения аналитических методов возникают и при описании реальных объектов, процессы в которых имеют сложный характер. Поэтому в подобных случаях эти методы дополняются экспериментальными исследованиями. Преимуществом моделей, полученных теоретическим путем, как правило, является их достаточно общий вид, позволяющий рассматривать поведение объектов в различных возможных режимах.
С практической точки зрения, более привлекательны экспериментальные методы, позволяющие находить модели объектов по результатам измерения их входных и выходных переменных. Хотя эти методы также предполагают наличие априорных сведений об изучаемом объекте, но их характер может быть не столь обстоятельным. Как правило, уровень априорных сведений должен быть достаточным лишь для выбора структуры модели и условий проведения эксперимента. Построение моделей объектов на основе такого подхода обычно называют идентификацией.
Рекомендательный библиографический список
Алексеев А.А. Теория управления: Учебное пособие / А.А.Алексеев, Д.Х.Имаев, Н.Н.Кузьмин, В.Б.Яковлев; СПбГЭТУ, СПб, 1999. 435с.
Борисов Б.М., Математические модели и расчет систем управления техническими объектами: Учебное пособие / Б.М.Борисов, Н.В.Пальянова, В.И.Экгардт; СПГГИ, СПб, 1999. 45с.
Наладка средств автоматизации и автоматических систем регулирования: Справочник // Под редакцией А.С.Клюева. М.: Энергоатомиздат, 1989. 368с.
Толпежников Л.И. Автоматическое управление процессами шахт и рудников: Учебник для вузов. М.: Недра, 1985. 352с.
Содержание
Введение
1. Математическое моделирование систем управления
1.1 Операторы преобразования переменных
1.2 Классы моделей
1.3 Способы построения моделей
1.4 Особенности структурных моделей систем управления
2. Линейные модели и характеристики систем управления
2.1 Модели вход-выход
2.2 Построение временных характеристик
2.3 Построение частотных характеристик
2.4 Построение моделей по системе дифференциальных уравнений
2.5 Построение моделей вход-выход по уравнениям в форме пространства состояний
2.6 Модели систем управления с раскрытой причинно-следственной структурой
2.7 Типовые звенья автоматических систем управления
2.8 Характеристики систем с типовой структурой
2.9 Неопределенность моделей систем управления
3. Нелинейные элементы систем управления
3.1 Безынерционные нелинейные элементы
3.2 Динамические нелинейные элементы
3.3 Нелинейные модели с раскрытой структурой
4. Примеры математических моделей объектов горной электромеханики
Заключение
Похожие работы
... балансовой, матричной моделью, причем выделяют как статические, так и динамические модели межотраслевого баланса[12]. 2. Основные направления применения методов и моделей исследования систем управления в современной экономике Производственная функция одной переменной Y = f(x) — функция, независимая переменная которой принимает значения объемов затрачиваемого ресурса (фактора производства), ...
... экспертов-консультантов - растет тенденциозность и безответственность Информационные : конференции улучшение информационной системы руководства практика открытых дверей Лекция 8 27.03.97 Методы исследования систем управления. План. Классификация методов в соответствии с решаемыми задачами. Учет закономерностей функционирования и развития систем при выборе методов их анализа. Краткая ...
... своевременное распределение средств на развитие. Данными вопросами я и занимаюсь в настоящей дипломной работе. 4. Математическое моделирование Интернет - услуг 4.1 Математическое моделирование dial-up подключений Сначала рассмотрим моделирование услуги предоставления доступа в Интернет по dial-up, так как данная услуга является показателем потенциальных абонентов для монопольной услуги ...
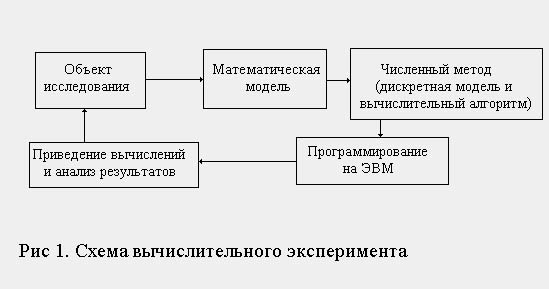
... целом как сложной системы в различных условиях. Вычислительные эксперименты с математическими моделями дают исходные данные для оценки показателей эффективности объекта. Поэтому математическое моделирование как методология организации научной экспертизы крупных проблем незаменимо при проработке народнохозяйственных решений. (В первую очередь это относится к моделированию экономических систем[6]). ...
0 комментариев