Классы моделей
Способы построения моделей
Особенности структурных моделей систем управления
Построение временных характеристик
Построение частотных характеристик
Построение моделей вход-выход по уравнениям в форме пространства состояний
Типовые звенья автоматических систем управления
Характеристики систем с типовой структурой
Неопределенность моделей систем управления
Динамические нелинейные элементы
Навигация
Построение моделей вход-выход по уравнениям в форме пространства состояний
Математическое моделирование и расчет систем управления техническими объектами
68359
знаков
14
таблиц
22
изображения
2.5 Построение моделей вход-выход по уравнениям в форме пространства состояний
Пусть дифференциальные уравнения объекта или системы управления записаны в форме пространства состояний:
![]() An + Bf, n(0);
An + Bf, n(0);
(27)
y = Cn + df.
Для простоты примем одномерный случай: переменные входа и выхода f и y являются скалярами; матрица входа В – столбец; матрица выхода С – строка; d – скаляр обхода.
Преобразуем уравнения (27) по Лапласу при нулевых начальных условиях:
sn(s) = AV(s) + BF(s);
(28)
Y(s) = Cn(s) + dF(s).
Выразим решение системы алгебраических уравнений – изображение вектора состояний – в следующей форме:
n(s) = (sI – A)-1BF(s), (29)
где (sI – A)-1 – матрица, обратная характеристической матрице (sI – A) матрицы А; I – единичная матрица. Подставим (28) в (29) и получим
Y(s) = W(s)F(s) = [C(sI – A)-1B + d]F(s).
Передаточная функция W может быть записана и иначе, если учесть, что
(sI – A)-1 = (sI – A)* / A(s), (30)
где (sI – A)* – присоединенная матрица;
A(s) = det(sI – A), (31)
A(s) – определитель характеристической матрицы – характеристический полином системы дифференциальных уравнений (17).
С учетом (30) передаточная функция запишется как
![]() (32)
(32)
Элементами присоединенной матрицы (sI – A)* являются алгебраические дополнения элементов характеристической матрицы (sI – A), т.е. полиномы. Их степени не могут превосходить n – 1. Таким образом, как видно из формулы (32), степень m = degB полинома числителя передаточной функции W не может быть выше степени n = degA характеристического полинома и равна ей только при ![]() . Это ограничивает возможности описания динамических систем в нормальной форме пространства состояний
. Это ограничивает возможности описания динамических систем в нормальной форме пространства состояний ![]() .
.
Имея полиномы передаточной функции (32), легко записать дифференциальное уравнение n-го порядка.
Преобразуем по Лапласу уравнения (27)
sn(s) – n(0) = An(s) + BF(s)
и получим выражение для изображения вектора состояния
n(s) = (sI – A)-1n(0) + (sI – A)-1 BF(s). (33)
В этой сумме первое слагаемое – свободное, а второе – вынужденное движения системы. Для получения оригинала – функции времени n(t) выполняется операция обратного преобразования Лапласа. В данном случае выражение для изображения представляет собой матрицу, однако справедлива аналогия со скалярным случаем. Оригинал скалярной функции
![]()
![]()
имеет вид экспоненты. Оказывается, что аналогичное выражение имеет место и в матричном случае, т.е.
L-1 {(sI – A)-1} = eAt = Ф(t),
что является матричной экспонентой, называемой матрицей перехода. Произведению изображений отвечает свертка оригиналов, это справедливо и для матриц. Поэтому вектор состояния как функция времени получается из выражения (33) и имеет следующий вид:
![]() (34)
(34)
Изображение переменной выхода при нулевых начальных условиях n(0) = 0 получится подстановкой второго слагаемого выражения (33) во второе уравнение системы (27):
![]()
Если на вход системы подается единичный импульс, т.е. F(s) = 1, то реакция системы (импульсная переходная функция) определяется из выражения (34):
![]() (35)
(35)
Сопоставляя полученную формулу с выражением для передаточной функции (32), замечаем, что
![]() .
.
Отсюда следует один из способов получения матрицы перехода путем обращения по Лапласу матрицы (sI – A)-1.
2.6 Модели систем управления с раскрытой причинно-следственной структурой
Под структурой систем управления понимают причинно-следственную связь между элементами направленного действия. Понятия «система» и «структура» являются близкими по смыслу. Наиболее общие определения понятий системы и структуры строятся как отношения на множествах, математически это графы. Графы являются универсальным средством описания структур систем. При небольшом числе элементов и связей весьма наглядны диаграммы графов, т.е. их геометрические образы.
В зависимости от элементов множеств рассматриваются различные типы графов. Приведенная на рис.3, а схема, иллюстрирующая принципы управления, отражает типовые структуры причинно-следственных отношений основных элементов систем управления и, по существу, представляет собой ориентированный граф. Электрическая и механическая схемы, изображенные на рис.2, также являются примерами графов, только неориентированных.
Имея в виду структуру связей элементов, иногда говорят о топологии (топографии) системы. Даже без конкретизации вершин и дуг, т.е. только по топологии, можно сделать ряд важнейших выводов о свойствах системы, которые сохраняются при дальнейшем раскрытии неопределенности – уточнении структур операторов и конкретизации значений параметров.
В зависимости от подхода к моделированию и от конкретного содержания элементов исходного множества и элементов отношения модели с раскрытой структурой могут быть представлены структурными схемами, сигнальными графами, системами дифференциальных уравнений в причинно-следственной форме и некоторыми другими формами.
Структурная схема (C-граф) представляет собой причинно-следственную связь звеньев. Линейное звено (рис.7, а) в общем случае имеет любое число входов; оно преобразует сумму входов в единственную переменную выхода по некоторому оператору Wi (рис.7, б):
![]()
В частном случае оператора тождественного преобразования звено выступает как сумматор.
Структурная схема является ориентированным графом и состоит из множества вершин W = {W1, …, WN} и множества дуг Х = {(Wi, Wj)} – упорядоченных пар вершин. Дугам графа соответствуют переменные xi; i = 1,..., N, а вершинам – звенья. Для того, чтобы отличать рассматриваемый граф от сигнальных графов других типов, назовем его С-графом. На языке теории бинарных отношений С-граф определяется как пара множеств:
С = < W,X >,
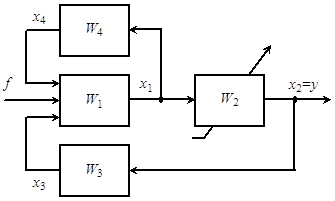
Рис.8. Структурная схема (С-граф)
а структурная схема (геометрический образ) называется также диаграммой графа (рис.8). Вершина С-графа – звено общего вида, по определению суммирует переменные заходящих дуг. Это позволяет отказаться от специального элемента суммирования, что отличает С-графы от классических структурных схем.
Дуга С-графа – элемент (Wi, Wj) отношения Х задает причинно-следственную связь между двумя звеньями, причем выход j-го звена является входом i-го. Дуге (Wi, Wj) соответствует переменная xj.
Теоретико-множественное описание систем дает естественный способ ввода и редактирования моделей систем управления как последовательного раскрытия неопределенности. Для этого модели упорядочиваются по рангам неопределенности R = 0, 1, 2, 3.
Множество W звеньев задает модель нулевого ранга Ms(0). Для примера С-графа, диаграмма которого изображена на рис.8, множество перечисляется так:
W = {W1, W2, W3, W4}.
В случае однотипных звеньев можно ограничиться заданием числа вершин графа (звеньев), т.е. мощности множества ![]() .
.
Дополнение модели Ms(0) множеством Х дает модель первого ранга Мs(1) – это топология (топография) системы. Для С-графа, изображенного на рис.8, множество перечисляется так: Х = {(1,3), (1,4), (2,1), (3,2), (4,1)}. В перечислении приведены только индексы (номера) звеньев.
Дальнейшее раскрытие неопределенности достигается при задании структур операторов вершин. Для рассматриваемого класса систем передаточные функции являются отношениями полиномов: Wi(s) = Bi(s) / Ai(s). Задание их структур сводится к указанию степеней mi и ni полиномов Bi и Ai. Когда для всех звеньев заданы структуры операторов, образуется модель системы структурного ранга Мs (2).
Пусть для рассматриваемого примера системы передаточные функции звеньев имеют вид W1(s) = k1; W2(s) = k2 / (1 + T2s)2; W3(s) = -1; W4(s) = -t4s / (1 + T4s). Информацию о структурах операторов можно закодировать массивами степеней полиномов числителей и знаменателей передаточных функций: {0,0,0,1} и {0,2,0,1}.
Результатом конкретизации значений всех коэффициентов полиномов является полностью определенная модель третьего, параметрического ранга Мs (3).
Ранее изложено описание собственно системы (автономной системы). Для описания связей системы со средой следует указать звено, на вход которого подается воздействие, и звено, выход которого является выходом системы. На примере С-графа (рис.8) номер входного звена r = 1, а выходного q = 2. В результате оказывается определенной модель системы со связями со средой Mysf (3). При изучении влияния вариаций звеньев на характеристики системы указывается варьируемое звено. На рис.8 им является звено W2.
Сигнальный граф (граф Мэзона) является одной из удобных в теории и расчетной практике форм представления моделей систем управления.
Модель системы в форме сигнального графа определяется как бинарное отношение W на множестве переменных Х = {x1, …, xN}: G = < X,W >
Элементам отношения W = {(xi xj)} ставятся в соответствие операторы преобразования переменных. На диаграммах сигнальных графов переменным отвечают вершины, где суммируются сигналы заходящих дуг, а элементам отношения – дуги. Способы задания моделей различных рангов в форме сигнальных графов те же, что и для С-графов.
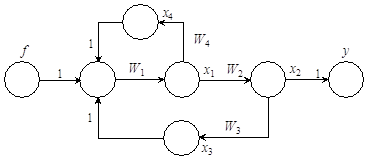
Рис.9. Диаграмма сигнального графа
На рис.9 изображена диаграмма сигнального графа – модель топологического ранга, несущая ту же информацию о системе, что и структурная схема (рис.8). Необходимо подчеркнуть, что формы представления моделей и способы их отображения могут быть различными – символьными или алгебраическими (уравнения, матрицы), геометрическими или топологическими (диаграммы графов). Информация о моделях различных рангов R последовательно раскрывается описанием множеств, задающих: состав элементов R = 0; топологию причинно-следственных связей между ними R = 1; структуры операторов R = 2; параметры R = 3.
Теоретико-множественное представление структур систем в форме графов обеспечивает формализацию описания моделей, упрощает кодирование их графических образов, а также разработку алгоритмов анализа систем.
Похожие работы
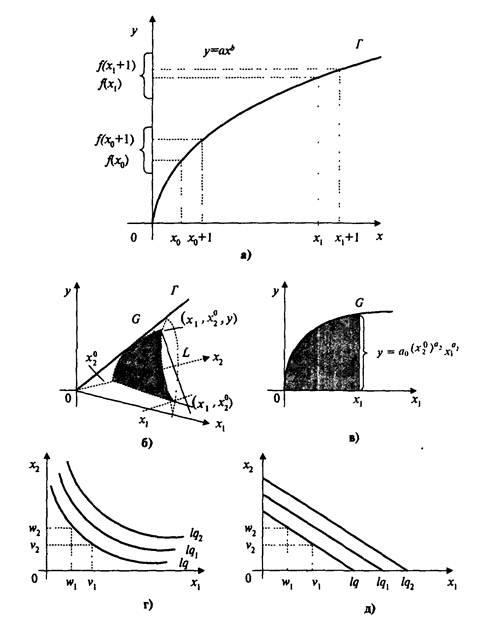
... балансовой, матричной моделью, причем выделяют как статические, так и динамические модели межотраслевого баланса[12]. 2. Основные направления применения методов и моделей исследования систем управления в современной экономике Производственная функция одной переменной Y = f(x) — функция, независимая переменная которой принимает значения объемов затрачиваемого ресурса (фактора производства), ...
... экспертов-консультантов - растет тенденциозность и безответственность Информационные : конференции улучшение информационной системы руководства практика открытых дверей Лекция 8 27.03.97 Методы исследования систем управления. План. Классификация методов в соответствии с решаемыми задачами. Учет закономерностей функционирования и развития систем при выборе методов их анализа. Краткая ...
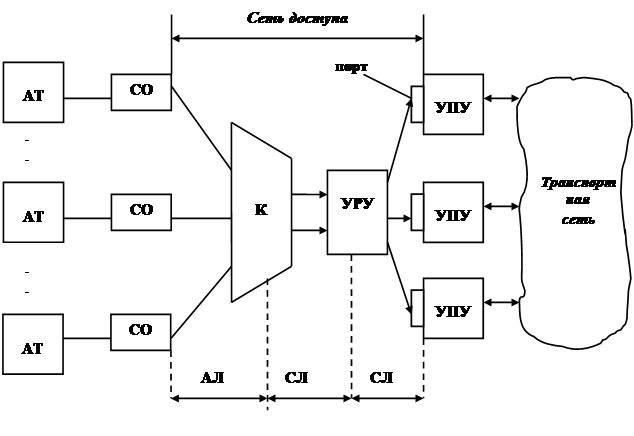
... своевременное распределение средств на развитие. Данными вопросами я и занимаюсь в настоящей дипломной работе. 4. Математическое моделирование Интернет - услуг 4.1 Математическое моделирование dial-up подключений Сначала рассмотрим моделирование услуги предоставления доступа в Интернет по dial-up, так как данная услуга является показателем потенциальных абонентов для монопольной услуги ...
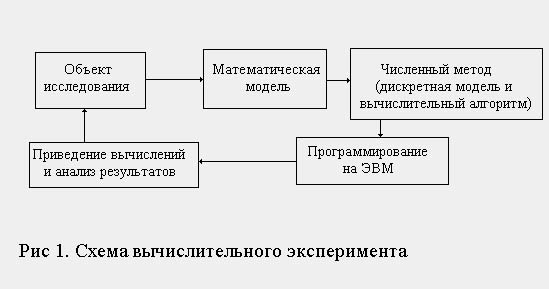
... целом как сложной системы в различных условиях. Вычислительные эксперименты с математическими моделями дают исходные данные для оценки показателей эффективности объекта. Поэтому математическое моделирование как методология организации научной экспертизы крупных проблем незаменимо при проработке народнохозяйственных решений. (В первую очередь это относится к моделированию экономических систем[6]). ...
0 комментариев