Погрешности результатов измерений
Статистический анализ случайных погрешностей
Абсолютная погрешность суммы и разности равна квадратичной сумме абсолютных погрешностей
Микрокалькулятор
Проверяют вертикальность установки машины Атвуда. Балансируют грузы
По угловому коэффициенту полученной прямой определяют значение приложенной силы и сравнивают ее с реально действующей в системе
Определить по графику все значения момента силы трения и найти его среднее значение. Сравнить полученный результат с ранее измеренным в задании 1
Анализируют вклад погрешностей измерений всех величин в общую погрешность и указывают, какая из величин должна быть измерена с наибольшей точностью
В выводе сравнивают измеренное и табличное значения ускорения свободного падения
Для получения биений используют два одинаковых генератора ГЗ-33
В выводе сопоставляют измеренные и вычисленные значения скорости
Если число колебаний N в первом и втором случаях одинаково, то формулы (13.14) и (13.15) можно записать через время и число колебаний
На нижнем конце проволоки вблизи зажима белой краской наносят кольцевую метку
Навигация
По угловому коэффициенту полученной прямой определяют значение приложенной силы и сравнивают ее с реально действующей в системе
Кинематика и динамика поступательного движения
136506
знаков
5
таблиц
32
изображения
4. По угловому коэффициенту полученной прямой определяют значение приложенной силы и сравнивают ее с реально действующей в системе.
ИЗУЧЕНИЕ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Цель работы
Экспериментальная проверка основного уравнения динамики вращательного движения твердого тела вокруг закрепленной оси.
Идея эксперимента
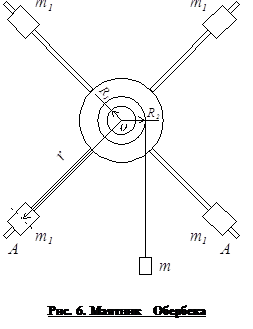
В эксперименте исследуется вращательное движение закрепленной на оси системы тел, у которой может меняться момент инерции (маятник Обербека). Различные моменты внешних сил создаются грузами, подвешенными на нити, намотанной на шкив.
Теория
Основное уравнение динамики вращательного движения твердого тела с моментом инерции J вокруг неподвижной оси z имеет вид
![]() , (2.1)
, (2.1)
 где
где ![]() - угловое ускорение, М – полный момент внешних сил. Поскольку величина e является функцией двух переменных, то изучение закона динамики вращательного движения твердого тела выполняется путем раздельного исследования двух зависимостей: 1) зависимости углового ускорения от момента силы при постоянном значении момента инерции (J = const) и 2) зависимости углового ускорения от момента инерции при постоянном значении момента силы (M = const).
- угловое ускорение, М – полный момент внешних сил. Поскольку величина e является функцией двух переменных, то изучение закона динамики вращательного движения твердого тела выполняется путем раздельного исследования двух зависимостей: 1) зависимости углового ускорения от момента силы при постоянном значении момента инерции (J = const) и 2) зависимости углового ускорения от момента инерции при постоянном значении момента силы (M = const).
Полный момент внешних сил равен
M = Mн – Мтр , (2.2)
где Мн – вращающий момент (в данной работе - момент силы натяжения нити) Мтр – момент силы трения. С учетом этого основное уравнение динамики вращательного движения принимает вид линейной зависимости момента силы натяжения Мн от e.
![]() .
(2.3)
.
(2.3)
Для экспериментального доказательства справедливости этого соотношения в работе используется маятник Обербека (рис. 6). Он состоит из четырех стержней А и двух шкивов с различными радиусами R1 и R2, укрепленных на одной горизонтальной оси. По стержням могут перемещаться и закрепляться в нужном положении четыре цилиндрических груза (по одному на каждом стержне) одинаковой массы m1. При помощи груза массы m, прикрепленного к концу нити, намотанной на тот или иной шкив, маятник может приводиться во вращение. Определяя продолжительность t движения и перемещение h груза, можно определить ускорение его поступательного движения
![]() . (2.4)
. (2.4)
Это ускорение равно линейному ускорению точек шкива и связано с угловым ускорением крестовины соотношением
![]() .
(2.5)
.
(2.5)
Момент силы натяжения Т нити равен
Mн =ТR . (2.6)
Силу Т можно определить из второго закона Ньютона для поступательного движения, который в проекциях на ось 0Y дает
![]() , (2.7)
, (2.7)
 где m – масса груза.
где m – масса груза.
Таким образом, момент сил натяжения
нити равен
![]() .
(2.8)
.
(2.8)
![]() Согласно (2.3) Мн линейная функция e. На рис. 7 эти зависимости для различных зна-чений моментов инерции системы изображены в виде графиков, угловые коэффициенты которых равны J. Эти графики отсекают от оси Мн отрезки, равные моменту силы трения Мтр. Так как Мтр одинаков во всех опытах, то все графики должны пересекаться в одной точке.
Функция (2.3) верна для любых двух моментов сил, поэтому
Согласно (2.3) Мн линейная функция e. На рис. 7 эти зависимости для различных зна-чений моментов инерции системы изображены в виде графиков, угловые коэффициенты которых равны J. Эти графики отсекают от оси Мн отрезки, равные моменту силы трения Мтр. Так как Мтр одинаков во всех опытах, то все графики должны пересекаться в одной точке.
Функция (2.3) верна для любых двух моментов сил, поэтому
 (2.9) Откуда
(2.9) Откуда
![]() . (2.10)
. (2.10)
Таким образом, величина J может быть, с одной стороны, измерена, а с другой стороны, рассчитана, исходя из масс и геометрических размеров деталей установки Обербека. Момент инерции J маятника вычисляется из условия аддитивности момента инерции и равен сумме моментов инерции шкивов, крестовины и цилиндрических грузов, вращающихся вокруг оси, не проходящей через их середины. Графики позволяют также определить момент силы трения Мтр., действующей в системе.
Экспериментальная установка
Ось маятника Обербека закреплена в подшипниках, так что вся система может вращаться вокруг горизонтальной оси. Передвигая грузы по спицам, можно легко изменять момент инерции системы. На шкив виток к витку наматывается нить, к которой привязана платформа известной массы. На платформу накладываются грузы из набора. Высота падения грузов измеряется с помощью линейки, укрепленной параллельно нити. Маятник Обербека может быть снабжен электромагнитной муфтой - пускателем и электронным секундомером. Перед каждым опытом маятник следует тщательно отрегулировать. Особое внимание необходимо обратить на симметричность расположения грузов на крестовине. При этом маятник оказывается в состоянии безразличного равновесия.
Проведение эксперимента
Задание 1. Оценка момента силы трения, действующей в системе
Измерения
1. Устанавливают грузы m1 на крестовине в среднее положение, размещая их на равном расстоянии от оси таким образом, чтобы маятник находился в положении безразличного равновесия.
2. Накладывая небольшие грузы на платформу, определяют приближенно минимальную массу m0 , при которой маятник начнет вращаться. Оценивают момент силы трения из соотношения
Мтр = m0gR , (2.11)
где R – радиус шкива, на который намотана нить.
3. Дальнейшие измерения желательно проводить с грузами массой m ³ 10m0.
Задание 2. Проверка основного уравнения динамики вращательного движения
Измерения
1. Укрепляют грузы m1на минимальном расстоянии от оси вращения. Балансируют маятник. Измеряют расстояние r от оси маятника до центров грузов.
2. Наматывают нить на один из шкивов. По масштабной линейке выбирают начальное положение платформы, производя отсчет, например, по ее нижнему краю. Тогда конечное положение груза будет находиться на уровне поднятой приемной платформы. Высота падения груза h равна разности этих отсчетов и может быть оставлена во всех опытах одинаковой.
3. Кладут на платформу первый груз. Расположив груз на уровне верхнего отсчета, фиксируют это положение, зажимая нить электромагнитной муфтой. Подготавливают к измерению электронный секундомер.
4. Отпускают нить, предоставив грузу возможность падать. Это достигается отключением муфты. При этом автоматически включается секундомер. Удар о приемную платформу останавливает падение груза и останавливает секундомер.
5. Измерение времени падения при одном и том же грузе выполняется не менее трех раз.
6. Проводят измерения времени падения груза m при других значениях момента Мн. Для этого либо добавляют на платформу дополнительные перегрузки, либо перебрасывают нить на другой шкив. При одном и том же значении момента инерции маятника необходимо провести измерения не менее чем с пятью значениями момента Мн .
7. Увеличивают момент инерции маятника. Для этого достаточно симметрично переместить грузы m1 на несколько сантиметров. Шаг такого перемещения должен быть выбран таким образом, чтобы получить 5-6 значений момента инерции маятника. Проводят измерения времени падения груза m (п.2-п.7). Все данные заносят в таблицу 2.1 отчета.
Обработка результатов. Исследование зависимости углового ускорения от момента силы при постоянном значении момента инерции.
1. Пользуясь формулами (2.4.), (2.5), (2.8), определяют для каждого опыта по средним значениям времени ![]() значения линейного ускорения а, углового ускорения e и момента силы натяжения нити Мн.
значения линейного ускорения а, углового ускорения e и момента силы натяжения нити Мн.
2. Строят графики зависимостей момента силы Мн, как функции, от углового ускорения e , как аргумента, для различных моментов инерции маятника J. Т. к. Мн = f(e) – линейная функция, то ее графики будут прямыми линиями. Если экспериментальные точки не ложатся на прямую, графики надо проводить так, чтобы «разброс» точек был приблизительно одинаков по обе стороны прямой. При этом они не обязательно пройдут через одну точку на вертикальной оси. Малый «разброс» точек свидетельствует о хорошей линейности функции Мн = f(e) и том, что угловое ускорение действительно прямо пропорционально полному моменту сил, приложенных к вращающемуся телу.
Обработка результатов. Исследование зависимости углового ускорения от момента инерции при постоянном значении момента силы
1. Для исследования используют ранее построенный график. Рассчитывают моменты инерции маятника по формуле (2.10). Для этого нужно выбирать точки прямо с графиков, например, А(М1н ,e1) и В(М2н,,e2 ).
2. На графике проводят горизонтальную прямую через произвольную точку на оси Мн, пересекающую графики Мн = f(e). Точки пересечения позволяют определить те значения угловых ускорений маятника, которые соответствуют разным значениям моментов инерции, но при постоянном значении момента силы M = Mн – Mтр. Записывают полученные значения e и соответствующие им значения J в таблицу 2.2. отчета.
3. Угловое ускорение обратно пропорционально моменту инерции, т. е. график зависимости e = f(J) представляет собой гиперболу и не идентифицируется. Но график зависимости e = f(J-1) должен представлять собой прямую линию, проходящую через начало координат. Поэтому следует вычислить величины J-1 и построить соответствующий график. Угловой коэффициент наклона этого графика равен полному моменту приложенных сил.
Обработка результатов. Определение момента силы трения, действующей в системе
1. В идеальном случае все графики M=f(e) должны пересекаться в одной точке, лежащей на оси М. Координата этой точки дает значение момента силы трения. Для реальных же графиков, скорее всего, будет иметь место некоторый разброс в положении этой точки.
Похожие работы
... самопроизвольно протекать не может, необходим подвод энергии извне. 2-й закон термодинамики с использованием понятия энтропии формулируется так: Все процессы в природе протекают в направлении увеличения энтропии, энтропия замкнутой системы не может самопроизвольно уменьшаться. В статистической физике энтропию связывают с термодинамической вероятностью состояния системы – с числом ...
... в 2 раза. 180. Найти относительную скорость движения двух частиц, движущихся навстречу друг другу со скоростями u1 = 0,6×c и u2 = 0,9×c. II. ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ Молекулярная физика и термодинамика – разделы физики, в которых изучаются макроскопические процессы в телах, связанные с огромным числом содержащихся в них атомов и молекул (макроскопические системы ...

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...

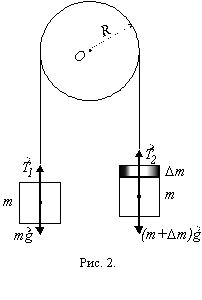
... тела - найти характеристики движения самого тела и отдельных его точек. В данном задании к таким характеристикам относятся векторы угловой скорости и углового ускорения тела. Рис. 1 Основные формулы кинематики плоского движения твердого тела - векторные формулы, связывающие соответственно скорости и ускорения двух произвольных точек плоской фигуры, например, точек А и В (рис. 1) B = A ...
0 комментариев