Погрешности результатов измерений
Статистический анализ случайных погрешностей
Абсолютная погрешность суммы и разности равна квадратичной сумме абсолютных погрешностей
Микрокалькулятор
Проверяют вертикальность установки машины Атвуда. Балансируют грузы
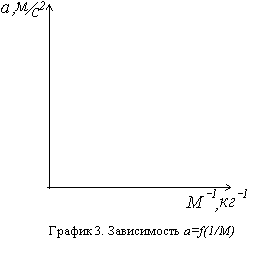
По угловому коэффициенту полученной прямой определяют значение приложенной силы и сравнивают ее с реально действующей в системе
Определить по графику все значения момента силы трения и найти его среднее значение. Сравнить полученный результат с ранее измеренным в задании 1
Анализируют вклад погрешностей измерений всех величин в общую погрешность и указывают, какая из величин должна быть измерена с наибольшей точностью
В выводе сравнивают измеренное и табличное значения ускорения свободного падения
Для получения биений используют два одинаковых генератора ГЗ-33
В выводе сопоставляют измеренные и вычисленные значения скорости
Если число колебаний N в первом и втором случаях одинаково, то формулы (13.14) и (13.15) можно записать через время и число колебаний
На нижнем конце проволоки вблизи зажима белой краской наносят кольцевую метку
Навигация
Определить по графику все значения момента силы трения и найти его среднее значение. Сравнить полученный результат с ранее измеренным в задании 1
Кинематика и динамика поступательного движения
136506
знаков
5
таблиц
32
изображения
2. Определить по графику все значения момента силы трения и найти его среднее значение. Сравнить полученный результат с ранее измеренным в задании 1.
Задание 3. Сравнение измеренных и вычисленных значений моментов инерции
маятника
1. Выписывают в таблицу 2.4 отчета измеренные значения моментов инерции маятника.
2. Используя формулы для расчета моментов инерции геометрически правильных тел и теорему Гюйгенса – Штейнера, вычисляют моменты инерции шкивов, крестовины и грузов, вращающихся вокруг оси, не проходящей через их середину. Данные для расчета берут из «паспорта» прибора. Общий момент инерции маятника находится суммированием моментов инерции деталей маятника.
3. Сравнивают вычисленные и измеренные значения моментов инерции. Находят относительные отклонения вычисленных и измеренных моментов инерции: ![]() .
.
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ И ПРОВЕРКА ТЕОРЕМЫ ГЮЙГЕНСА-ШТЕЙНЕРА
МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы Экспериментальная проверка теоремы Гюйгенса – Штейнера и определение моментов инерции тел простой формы. Идея экспериментаВ эксперименте используется связь между периодом колебаний крутильного маятника и его моментом инерции. В качестве маятника выбрана круглая платформа, подвешенная в поле тяжести на трех длинных нитях (трифилярный подвес). Платформа может совершать крутильные колебания вокруг вертикальной оси. На платформу помещаются тела различной формы, измеряются периоды колебаний маятника и определяются значения моментов инерции этих тел. Теорема Гюйгенса – Штейнера проверяется по соответствию между экспериментальной и теоретической зависимостями моментов инерции грузов от их расстояния до центра платформы.
Теория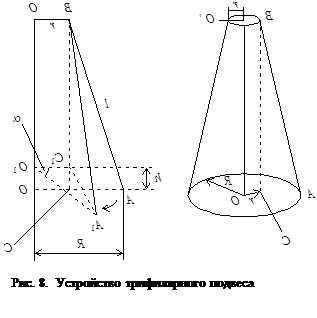 Основное уравнение вращательного движения твердого тела вокруг неподвижной оси имеет вид
Основное уравнение вращательного движения твердого тела вокруг неподвижной оси имеет вид
![]() , (3.1)
, (3.1)
где w - угловая скорость вращения, J – момент инерции тела относительно оси вращения, М – момент внешних сил относительно этой оси.
Теорема Гюйгенса – Штейнера. Если момент инерции тела относительно некоторой оси вращения, проходящей через центр масс, имеет значение J0, то относительно любой другой оси, находящейся на расстоянии а от первой и параллельной ей, он будет равен
![]() , (3.2)
, (3.2)
где m – масса тела.
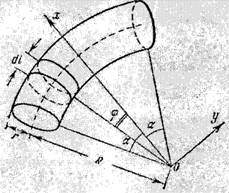
Для проверки теоремы Гюйгенса – Штейнера в данной работе исследуются крутильные колебания твердого тела на трифилярном подвесе. Трифилярный подвес представляет собой круглую платформу радиуса R, подвешенную на трех симметрично расположенных нитях одинаковой длины, укрепленных у ее краев (рис. 8). Наверху эти нити также симметрично прикреплены к диску несколько меньшего размера (радиуса r). Платформа может совершать крутильные колебания вокруг вертикальной оси ОО¢, перпендикулярной к ее плоскости и проходящей через ее центр. Такое движение платформы приводит к изменению положения ее центра тяжести по высоте.
Если платформа массы m, вращаясь в одном направлении, поднялась на высоту h, то
приращение ее потенциальной энергии будет равно
![]() , (3.3)
, (3.3)
где g – ускорение силы тяжести. Вращаясь в другом направлении, платформа придет в положение равновесия (h = 0) с кинетической энергией, равной
![]() ,
(3.4)
,
(3.4)
где J – момент инерции платформы, w0 – угловая скорость вращения платформы в момент прохождения ею положения равновесия.
Пренебрегая работой сил трения, на основании закона сохранения механической энергии имеем:
![]() .
(3.5)
.
(3.5)
Считая, что платформа совершает гармонические крутильные колебания, можно записать зависимость углового смещения платформы a от времени t в виде
![]() ,
(3.6)
,
(3.6)
где a - угловое смещение платформы, a0 – угол максимального поворота платформы, т.е. амплитуда углового смещения, Т – период колебания. Для угловой скорости w, являющейся первой производной по времени от величины смещения, можно записать
![]() .
(3.7)
.
(3.7)
В моменты прохождения платформы через положение равновесия (t = 0, 0,5Т, …) величина w(t) будет максимальна и равна
![]() . (3.8)
. (3.8)
Из выражений (3.5) и (3.8) следует, что
 .
(3.9)
.
(3.9)
Если l длина нитей подвеса, R – расстояние от центра платформы до точек крепления нитей на ней, r – радиус верхнего диска (рис. 8), то легко видеть, что
![]() (3.10)
(3.10)
![]() , (3.11)
, (3.11)
а при максимальном отклонении платформы от положения равновесия
![]() , (3.12)
, (3.12)
то
 . (3.13)
. (3.13)
При малых углах отклонения a0значение синуса этого угла можно заменить просто значением a0. Учитывая также, что при R<< l величину знаменателя можно положить равной 2l, получаем
![]() (3.14)
(3.14)
При этом закон сохранения энергии (2.9) примет вид:
 ,
(3.15)
,
(3.15)
откуда следует, что
![]() (3.16)
(3.16)
По формуле (3.16) можно экспериментально определить момент инерции пустой платформы или платформы с телом, положенным на нее, так как все величины в правой части формулы непосредственно измеряются. Следует помнить, что m – это суммарная масса платформы и исследуемого тела, положенного на нее.
Экспериментальная установкаВид установки показан на рис.8. Отношение радиуса платформы к длине нитей подвеса R/l < 0,05, что соответствует приближениям, используемым при выводе формулы (3.16).
Тела на платформу необходимо класть строго симметрично, так, чтобы не было перекоса платформы. Для облегчения определения положения грузов и более точной их установки на платформе нанесены радиальные линии и концентрические окружности на определенном расстоянии друг от друга (5 мм).
Вращательный импульс, необходимый для запуска крутильных колебаний, сообщается платформе путем поворота верхнего диска вокруг оси. Это достигается с помощью рычага, закрепленного на верхнем диске. При таком возбуждении почти полностью отсутствуют другие виды колебаний, наличие которых затрудняет измерения. При измерениях недопустимо пользоваться амплитудами колебаний, большими 10°.
Измерение времени колебаний может проводиться или с помощью ручного секундомера или с помощью таймера.
Проведение экспериментаЗадание 1. Измерение момента инерции пустой платформы
Измерения и обработка результатов1. Момент инерции пустой платформы Jпл определяется по формуле (3.16). При этом период колебаний пустой платформы Ти его погрешность определяются на опыте, а величины l, R, r, m и их погрешности даются, как постоянные установки.
2. Сообщают платформе вращательный импульс и измеряют время tнекоторого числа (N = 15 –20) полных колебаний. Такие измерения повторяют 3 – 5 раз. Полученные результаты заносят в таблицу 3.1 отчета.
3. По экспериментальным данным для каждого опыта находят значение периода крутильных колебаний.
4. Находят среднее значение ![]() и полную погрешность периода колебаний. При этом систематическая погрешность в измерении периода может быть взята равной
и полную погрешность периода колебаний. При этом систематическая погрешность в измерении периода может быть взята равной ![]() .
.
5. Вычисляют момент инерции платформы JплЭ . Находят величину относительной и абсолютной погрешности для момента инерции платформы.
6. Рассчитывают теоретически момент инерции платформы JплT, исходя из ее массы и размеров. Находят погрешность такого расчета.
7. Сравнивают измеренное на опыте и вычисленное теоретически значение момента инерции пустой платформы. Указывают на сколько процентов экспериментальное
значение отличается от теоретического:  .
.
Задание 2. Определение моментов инерции тел заданной формы
Измерения и обработка результатов1. Платформу поочередно нагружают исследуемыми телами таким образом, чтобы их центр масс совпадал с осью вращения платформы. В качестве исследуемых тел выбираются пластины, имеющие форму квадрата, прямоугольника, равностороннего треугольника, диска, а также другие тела правильной геометрической формы.
2. Измеряют время нескольких колебаний всей системы. Для каждого тела проводят измерения 3 – 5 раз. Результаты измерений заносят в таблицу 3.2 отчета.
3. Вычисляют моменты инерции нагруженных платформ JNи их погрешности. При этом необходимо учесть, что в формулу (3.16) следует подставлять сумму масс тела и платформы, а в формуле погрешности погрешность массы равна суммарной погрешности массы платформы и тела.
4. Пользуясь тем, что момент инерции – величина аддитивная, вычисляют моменты инерции тел: JЭ = JN – JплЭ. Находят величину абсолютной и относительной погрешности для моментов инерции тел.
5. Проводят сравнение экспериментально полученных значений моментов инерции с рассчитанными теоретически (см. Приложение 3). Результаты расчетов заносят в таблицу 3.3 отчета.
Задание 3. Проверка теоремы Гюйгенса - Штейнера
Измерения1. Для проверки теоремы Гюйгенса – Штейнера используют два или несколько одинаковых тел, имеющих цилиндрическую форму.
2. Устанавливают грузы в центре платформы, положив их один на другой. Возбуждают крутильные колебания платформы. Измеряют время t нескольких колебаний (N= 15 – 20). Данные заносят в таблицу 3.4 отчета.
3. Располагают грузы симметрично на платформе относительно оси вращения. Проводят измерение времени колебаний для 5 – 7 положений грузов, постепенно перемещая их к краям платформы. Заносят в таблицу 3.4 значения расстояний от центра масс каждого тела а до центра платформы, число колебаний N и время этих колебаний tN.
Обработка результатов 1.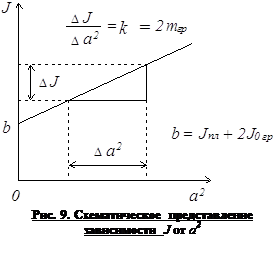 Для каждого положения грузов определяют период колебаний грузов Ti.
Для каждого положения грузов определяют период колебаний грузов Ti. 2. Заносят в таблицу значения а2.
3. Для каждого положения грузов находят значения момента инерции платформы с грузами Ji по формуле (3.16).
4. Полученные значения момента инерции Ji наносят на график зависимости момента инерции системы тел от квадрата расстояния центра масс грузов до оси вращения а2 (схематично эта зависимость представлена на рис. 9). Как следует из теоремы Гюйгенса – Штейнера, этот график должен быть прямой линией, с угловым коэффи-
циентом численно равным 2mгр, где mгр – масса одного груза. Кроме того, отрезок, отсекаемый от оси ординат, равен сумме моментов инерции ненагруженной платформы и моментов инерции грузов b = Jпл+ 2J0гр.
5. Из зависимости J=f(a2) определяют значение mгр и величину b. Сравнивают полученное значение с массами грузов, используемыми в работе, а также полученное значение b с расчетным значением. Совпадение этих величин (с учетом погрешностей вычислений) также подтверждает теорему Гюйгенса-Штейнера.
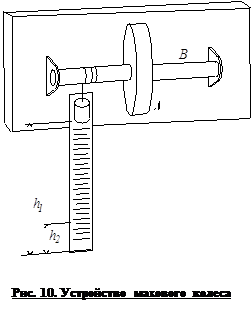
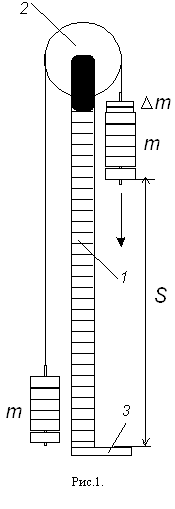
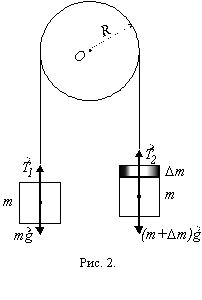
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВОГО КОЛЕСА И СИЛЫ ТРЕНИЯ В ОПОРЕ Цель работы
|
В эксперименте используется массивное колесо, насаженное на горизонтально расположенный вал. Колесо приводится во вращение с помощью намотанного на вал шнура, к концу которого прикреплен груз.
ТеорияМомент инерции – мера инертности тела при вращательном движении. Необходимо иметь в виду, что момент инерции в общем случае может иметь разные значения относительно разных осей вращения тела. Если тело имеет произвольную форму и произвольное распределение масс, момент инерции можно определить только приблизительным суммированием
![]() ,
,![]()
где ri – расстояние от оси вращения до i-той элементарной массы Dmi.
Если тело имеет правильную геометрическую форму и постоянную плотность по всему объему, суммирование может быть заменено интегрированием по всему объему
![]() .
.
Для расчета моментов инерции тел, имеющих простую геометрическую форму (диск, стержень, квадрат и т.д.), обычно пользуются готовыми формулами (Приложение 3).
В случаях, когда расчет моментов инерции тел затруднен, применяют различные способы их измерения. Ряд таких способов рассмотрен в данном практикуме. В настоящей работе предлагается энергетический подход к определению момента инерции.
Маховое колесо (рис. 10) состоит из маховика А, жестко закрепленного на горизонтальном валу В. На вал наматывается шнур, к концу которого прикреплен груз массой m, под действием силы тяжести которого вал может раскручиваться. При вращении любого тела возникают моменты сил, препятствующих его вращению. Эти моменты создаются, в основном, силами трения в опорах и, частично, силой сопротивления воздуха. Последний в данной работе не учитывается из-за его малости. Величина момента силы трения Мтр в опорах может быть установлена, например, из условия равновесия М - Мтр =0, а также по потере энергии вращающегося тела, как это сделано в данной работе. При падении с высоты h1 потенциальная энергия груза mgh1 идет на увеличение кинетической энергии поступательного
движения самого груза mv2/2, на увеличение кинетической энергии вращательного движения маховика и вала прибора Jw2/2 и на совершение работы А = Мтрj по преодолению трения в опорах. По закону сохранения энергии
![]() ,
(4.1)
,
(4.1)
где j1 – угловое перемещение вала в опоре, соответствующее перемещению h1 груза.
Движение груза равноускоренное, без начальной скорости, поэтому
![]() ,
(4.2)
,
(4.2)
где t – время опускания груза с высоты h1. Угловая скорость махового колеса
![]() ,
(4.3)
,
(4.3)
где r – радиус вала В. Момент силы трения Мтр устанавливается следующим образом. Колесо, вращаясь по инерции, поднимает груз на высоту h2<h1, на которой потенциальная энергия будет равна mgh2. Изменение потенциальной энергии при движении груза равно работе по преодолению момента силы трения в опорах, т.е.
![]() .
(4.4)
.
(4.4)
Откуда
![]() .
(4.5)
.
(4.5)
Выражая угловой путь (j1 + j2) через линейный (h1 + h2) и радиус вала r, получаем
![]() . (4.6)
. (4.6)
Это выражение является рабочей формулой для измерения Мтр. Подставляя в формулу (4.1) значения v, w, Мтр из (4.2), (4.3), (4.6), получаем рабочую формулу для определения момента инерции махового колеса
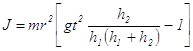 .
(4.7)
.
(4.7)
Экспериментальная установка
При подготовке к измерению махового колеса шнур наматывается на вал виток к витку. К концу шнура прикреплена платформа известной массы, на которую накладываются грузы из набора к установке. Для измерения высоты падения груза h1 и высоты его поднятия h2 рядом с установкой укреплена масштабная линейка. Время падения груза измеряется с помощью ручного или стационарного электронного секундомера.
Проведение эксперимента
Задание 1. Измерение момента инерции махового колеса и момента силы трения
Измерения
1. Штангенциркулем измеряют радиус вала.
2. Высоту падения груза h1 во всех опытах можно брать одной и той же. Поэтому ее можно предварительно измерить как расстояние между заранее выбранным верхним
положением груза и его положением при полном разматывании шнура.
3. Наматывают шнур на вал, поднимая груз до выбранной отметки. На платформу кладут один груз из набора. Измеряют время падения груза до полного разматывания шнура.
4. Измеряют высоту h2, на которую поднимается груз после разматывания шнура.
5. Опыт с одним грузом повторяют не менее трех раз. Затем выполняют измерения с двумя и тремя грузами. Все данные заносят в таблицу 4.1 отчета.
Обработка результатов1. По формулам (4.6) и (4.7) для каждого значения массы вычисляют момент силы трения в опорах и момент инерции махового колеса, подставляя средние значения времени t и высоты h2 .
2. Находят среднее значение момента инерции махового колеса. Не имеет смысла находить среднее значение момента силы трения, так как при разных нагрузках на вал он должен иметь разные значения.
3. Погрешности измерения момента инерции предлагается оценить для опыта с одним из грузов. Полученное значение относительной погрешности момента инерции можно применить к среднему значению момента инерции. Величины систематических погрешностей измерений высот h1 и h2 следует брать, исходя из реальных условий их измерения. Погрешности измерений масс платформы и грузов равны ±0,5г.
Похожие работы
... самопроизвольно протекать не может, необходим подвод энергии извне. 2-й закон термодинамики с использованием понятия энтропии формулируется так: Все процессы в природе протекают в направлении увеличения энтропии, энтропия замкнутой системы не может самопроизвольно уменьшаться. В статистической физике энтропию связывают с термодинамической вероятностью состояния системы – с числом ...
... в 2 раза. 180. Найти относительную скорость движения двух частиц, движущихся навстречу друг другу со скоростями u1 = 0,6×c и u2 = 0,9×c. II. ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ Молекулярная физика и термодинамика – разделы физики, в которых изучаются макроскопические процессы в телах, связанные с огромным числом содержащихся в них атомов и молекул (макроскопические системы ...

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...

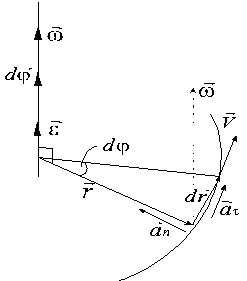
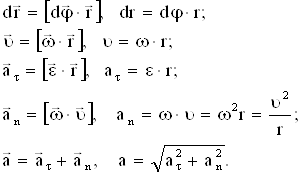
... тела - найти характеристики движения самого тела и отдельных его точек. В данном задании к таким характеристикам относятся векторы угловой скорости и углового ускорения тела. Рис. 1 Основные формулы кинематики плоского движения твердого тела - векторные формулы, связывающие соответственно скорости и ускорения двух произвольных точек плоской фигуры, например, точек А и В (рис. 1) B = A ...
0 комментариев