Разработка функциональной структуры робототехнических средств
Моделирование структурных схем исполнительных механизмов робототехнических средств
Алгоритм моделирования траектории выходного звена исполнительного органа робототехнического средства
Выбор критериев оптимизации при проектировании робототехнических средств
Принципы разработки циклограммы робототехнического средства
Контроль надежности робототехнического средства при испытаниях
Новые технические решения робототехнических средств для машин прядильного производства
Проектирование усовершенствованного автосъемника бобин АС‑120 для пневмомеханической прядильной машины ППМ‑120
Определение конструктивных требований к функционально взаимодействующим структурным схемам рабочих органов автосъемника бобин
Новые технические решения основных исполнительных органов автосъемника бобин АС‑120 с учетом граничных условий проектирования
Определение траектории выходного звена механизма сопла
Оптимизация конструктивных параметров коромысла нового механизма сопла
Вычисляем коэффициенты k и b, используя подпрограмму KOR
Из двух значений y выбираем максимальное согласно конструктивным особенностям механизма сопла
Навигация
Новые технические решения робототехнических средств для машин прядильного производства
Проектирование роботехнических средств для поточных линий прядильного производства
149120
знаков
11
таблиц
29
изображений
2. Новые технические решения робототехнических средств для машин прядильного производства
Ранее в п. 1 отмечалось, что каждый этап разработанного метода проектирования робототехнических средств текстильных машин может быть использован как самостоятельный способ проектирования.
С целью выявления новых технических решений PC для машин прядильного производства приведем применение этапа моделирования структурных схем исполнительных органов PC разработанного метода как самостоятельного способа проектирования.
Произведем синтез структурных схем исполнительных механизмов робототехнических средств на основе разработанной морфологической матрицы. По желанию конструктора или требованию заказчика данная матрица может быть уменьшена или расширена и более конкретизирована, т.е. «привязана» к техническим требованиям на проектируемое робототехническое средство.
Покажем это на примере механизма сопла автосъемника бобин для пневмомеханических прядильных машин.
Увеличим число независимых свойств в параметре ![]() и в введем еще три дополнительных параметра. Получим:
и в введем еще три дополнительных параметра. Получим:
![]() – форма выходного звена механизма сопла, совершающего захват обрезанной нити:
– форма выходного звена механизма сопла, совершающего захват обрезанной нити:
а) прямолинейная ![]() ;
;
б) Г-образная ![]() ;
;
в) C‑образная ![]() ;
;
г) Z‑образная ![]() .
.
![]() – тип выходного звена механизма сопла, совершающего обрезку нити:
– тип выходного звена механизма сопла, совершающего обрезку нити:
а) электромагнитные ножницы ![]() ;
;
б) Г-образный резак ![]() ;
;
в) прямолинейный резак ![]() ;
;
г) резак по форме всасывающего отверстия сопла ![]() ;
;
д) резак, имеющий форму окружности ![]() .
.
![]() – место расположения устройства отрезания нити механизма сопла:
– место расположения устройства отрезания нити механизма сопла:
а) около каждого рабочего места на пневмопрядильной машине ![]() ;
;
б) на устройстве механизма сопла, совершающего захват отрезанной нити ![]() .
.
![]() – наличие устройства второй обрезки нити у механизма сопла:
– наличие устройства второй обрезки нити у механизма сопла:
а) не имеется ![]() ;
;
б) имеется ![]() .
.
Преобразованная в соответствии с дополнительными условиям морфологическая матрица имеет следующий вид:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Согласно полное число решений по формуле как для отдельного исполнительного механизма, так и для всего РС по формуле увеличится.
Произведем синтез технических решений механизма сопла автосъемника бобин путем выбора альтернативных вариантов в морфологической матрице.
В приведенных далее матрицах выделенные параметры относятся к выбранным техническим решениям проектируемых механизмов.
Составим описание выбранных технических решений.
Сущность технического решения морфологической матрицы механизма сопла автосъемника бобин, представленной на рис. 11, поясняется чертежами, где на рис. 12 изображена общая схема устройства; на рис. 13 – узел захвата пряжи и переброски ее через устанавливаемый в паковкодержатель патрон; на рис. 14 – вид А по рис. 13.
Автосъемник бобин для пневмопрядильной машины содержит механизм 1 захвата и установки в паковкодержатель 2 патрона 3, механизм 4 управления паковкодержателем и узел 5 захвата пряжи 6 и переброски ее через устанавливаемый в паковкодержатель патрон. Узел 5 имеет сопло 7 со средством для перерезания пряжи в виде ножниц, размешенных на самом сопле 7. Сопло 7 установлено с возможностью принудительного поворота посредством привода, имеющего жестко связанную с соплом шестерню 8, зубчатый сектор 9, закрепленный на приводном валу 10, связанном посредством звездочки и цепи 12 с механизмом 1 захвата и установки патрона.
Привод имеет два входящих в зацепление одно с другим зубчатых колеса, из которых ведущее колесо 13 установлено на валу 10 и через вал 10 жестко связано с зубчатым сектором 9 и диском 14 фиксатора сопла в его нерабочем положении. Ведомое зубчатое колесо 15 с соосно закрепленным на нем колесом 16, имеющим два зубчатых сектора, установлено на оси 17, размещенной на раме 18 устройства. Колесо 16 имеет возможность зацепления своими зубчатыми секторами с шестерней 8 сопла, на торце которой закреплен диск 19 фиксатора сопла, выполненный с выемкой на ободе.
Диск 14 выполнен с выступом 20 на ободе и установлен с возможностью размещения выступа 20 в выемке диска 19, а зубчатый сектор 9 имеет возможность зацепления с шестерней 8 сопла с последующим выходом из него. На раме 18 закреплены упоры 21 и 22 для ограничения рабочих положений сопла, имеющего ![]() -образную форму.
-образную форму.
Устройство работает следующим образом.
Движущееся вдоль машины устройство при установлении завершения на ее определенном прядильном месте формирования паковки останавливается и подает сигнал на сброс патрона с расположенной над машиной полки 23 на специальный желоб 24 устройства. Механизм 1 захвата и установки патрона из исходного положения начинает движение к желобу, захватывает из него патрон и перемещается с ним к месту его установки в рычаги паковкодержателя. Одновременно с механизмом 1 начинает свой рабочий цикл и узел захвата пряжи и переброски ее через патрон. Движение от вала механизма 1 захвата и установки патрона посредством цепной передачи через звездочку 11 передается валу 10. Далее вал 10 приводит во вращение зубчатое колесо 13, зубчатый сектор 9 и диск 14 с выступом. В начале рабочего цикла узла 5 диск 14 находится в зацеплении с диском 19, в результате чего происходит выстой сопла 7 в исходном положении. При выходе дисков из зацепления один с другим в зацепление входят шестерня 8 и колесо 16, закрепленное на ведомом зубчатом колесе 15, следствие этого происходит перемещение сопла 7 в сторону пряжи, выходящей из вытяжных валов 25 прядильной машины. Дойдя до своего нижнего крайнего положения, сопло останавливается у упора 21, производятся перерезание пряжи ножницами, захват и удержание пряжи соплом. В это же время колесо 16 выходит из зацепления с шестерней 8 и в зацепление с последней входит зубчатый сектор 9, в результате этого сопло с захваченной им пряжей начинает движение в сторону механизма 1 захвата и установки патрона, находящегося в данный момент у желоба 24. Сопло с захваченной им пряжей доходит до верхнего крайнего положения и останавливается у упора 22. В этот период времени зубчатый сектор 9 выходит из зацепления с шестерней 8, а механизм 1 захвата и установки патрона со взятым им из желоба патроном пересекает траекторию пряжи, удерживаемой в данный момент соплом 7, в результате чего происходит перекидка пряжи через устанавливаемый патрон. Далее колесо 16 входит в зацепление с шестерней 8, вследствие чего сопло возвращается в свое исходное положение, в котором оно четко зафиксировано при помощи находящихся в данный момент в зацеплении посредством выступа и выемки дисков 14 и 19. Механизм 1 захвата и установки пустого патрона производит сбрасывание полной паковки на ленту транспортера и установку патрона с перекинутой через него нитью в рычаги паковкодержателя прядильной машины, которые к этому моменту находятся в верхнем крайнем положении вследствие работы механизма 4 управления паковкодержателем пневмомеханической прядильной машины. Далее паковкодержатель возвращается в нижнее крайнее положение, и начинается процесс наработки паковки.
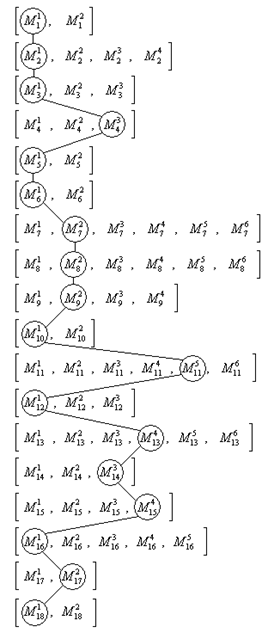
![]() Рис. 11. Морфологическая матрица технического решения механизма сопла автосъемника бобин
Рис. 11. Морфологическая матрица технического решения механизма сопла автосъемника бобин
Сущность технического решения морфологической матрицы, представленной на рис. 15, поясняется чертежами, где на рис. 16 изображена общая схема устройства; на рис. 17 – узел захвата и переброски пряжи через устанавливаемый в паковкодержатель патрон, разрез; на рис. 18 – электрические контакты в разрезе; на рис. 19 – средство для перерезания пряжи; на рис. 20, 21 – узел захвата и переброски пряжи в рабочем положении; на рис. 22 – средство для перерезания пряжи со связью силового элемента с электрическими контактами.
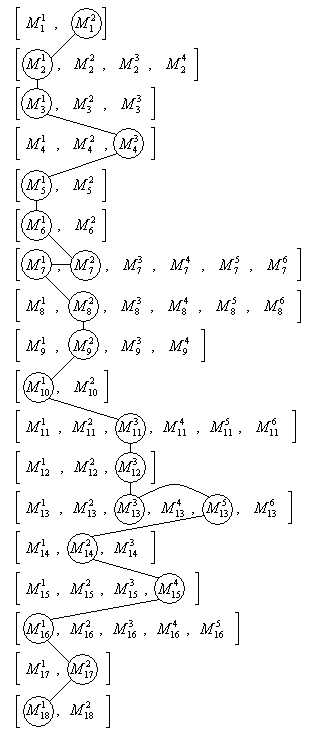
Рис. 15. Морфологическая матрица технического решения механизма сопла автосъемника бобин
Автосъемник бобин для пневмопрядильной машины содержит смонтированную с возможностью перемещения вдоль машины каретку 1 и установленные на ней механизм 2 захвата и установки в паковкодержатель 3 патрона 4, механизм управления 5 паковкодержателем и узел 6 захвата пряжи 7 и переброски ее через устанавливаемый в паковкодержатель патрон.
На каретке 1 на оси 8 посредством подшипников 9 установлен блок звездочек 10, кинематически связанный с приводом механизма 2 захвата и установки патрона. На блоке звездочек 10 установлен кривошип 11, связанный с кулисой 12 посредством размещенного в ее криволинейном пазу 13 пальца 14. На свободном конце кулисы посредством подшипников установлены два пространственных кулачка 15, связанных ременными передачами 16 и 17 с блоком 18 шкива со звездочкой, получающим вращение через промежуточную звездочку 19 от блока звездочек 10. На кулисе 12 на оси 20 консольно установлена ![]() -образная трубка 21, на которой закреплен подпружиненный фрикционный ролик 22, имеющий возможность вращения совместно с трубкой 21 на оси и продольного перемещения вдоль нее посредством кулачков 15. На торце ролика 22 закреплен сепаратор 23 с шариками 24, прижатыми пружиной 25 к кулачкам 15.
-образная трубка 21, на которой закреплен подпружиненный фрикционный ролик 22, имеющий возможность вращения совместно с трубкой 21 на оси и продольного перемещения вдоль нее посредством кулачков 15. На торце ролика 22 закреплен сепаратор 23 с шариками 24, прижатыми пружиной 25 к кулачкам 15.
Фрикционный ролик 22 имеет фиксатор положения, выполненный в виде установленного на кулисе конечного выключателя 26 со стержнем 27, размещенным в выемке 28 фрикционного ролика с возможностью вывода из нее.
Фрикционный ролик 22 установлен с возможностью контактирования ободом с ободом приводного упругого ролика 29 при повороте кулисы, установленного посредством подшипников 30 на оси на каретке 1 и связанного со звездочкой 31, приводимой во вращение цепью от блока звездочек 10.
На конце трубки 21 установлено средство для перерезания пряжи, имеющее неподвижную 32 и поворотную 33 зажимные губки с размещенными на их свободном конце гибкими направляющими 34 и закрепленными на губках режущими элементами 35. Средство для поворота губки 33 имеет подпружиненный силовой элемент в виде электромагнита 36, размещенного в трубке и электрически связанного со скользящим электрическим контактом в виде стержня 37. Стержень 37 размещен в изолирующей втулке 38 в трубке 21 и имеет на торце выемку, в которой размещен прижатый к нему пружиной 39 завальцованный на конце стержня 40 второго скользящего электрического контакта шарик 41. Стержень 40 размещен в электрически связанной с датчиком втулке 42, закрепленной в изолирующей втулке 43, установленной в отверстии оси 20.
Устройство работает следующим образом.
При завершении формирования паковки на каком-либо прядильном месте машины перемещающаяся вдоль нее каретка 1 останавливается у соответствующего места. Пустой патрон 4, находящийся на расположенной над прядильным местом машины полке, сбрасывается в направляющий желоб. Механизм 2 захвата и установки пустого патрона из исходного положения начинает движение к желобу, захватывает из него патрон 4 и перемещает его к месту установки в рычаги паковкодержателя. Одновременно движение от вала механизма захвата и установки патрона посредством цепной передачи через блок звездочек 10 передается соединенному с ним кривошипу 11, палец 14 которого поворачивает кулису, скользя по прямолинейному участку ее паза 13 и перемещая ее из нижнего положения. От блока звездочек 10 вращение передается шкивам 44 и 45 кулачков 15, вращение которых вызывает осевое возвратно-поступательное перемещение фрикционного ролика 22 вместе с трубкой 21. В результате этого при подъеме кулисы 12 зажимные губки на конце трубки попадают в зону веера раскладки пряжи и, пересекая траекторию пряжи, улавливают ее, при этом их гибкие направляющие контролируют веер раскладки пряжи. По сигналу датчика электрические контакты 41, 37 передают электрический сигнал электромагниту 36, который поворачивает губку 33 в направлении к неподвижной губке 32, в результате чего пряжа перерезается и ее конец зажимается между губками.
Выполнение электрических контактов 41, 37 скользящими позволяет трубке 21 совершать вместе с фрикционным роликом 22 возвратно-поступательные перемещения.
При подходе кулисы 12 к своему крайнему верхнему положению конечный выключатель 26 выводит стержень 27 из выемки фрикционного ролика 22 и освобождает его от фиксации. В этот момент фрикционный ролик 22 входит своим ободом в контакт с ободом приводного ролика 29, получающего вращение от блока звездочек 10 с помощью жестко связанной с роликом 29 звездочки 31. В результате этого фрикционный ролик 22 вместе с трубкой 21 приводится во вращение в направлении, противоположном направлению вращения блока звездочек 10, чем осуществляется наматывание зажатого между губками 32 и 33 конца пряжи на патрон. В этот момент палец 14 кривошипа 11 находится в зоне криволинейного участка паза кулисы с радиусом кривизны, равным длине кривошипа. Поэтому кулиса находится в положении выстоя. При вращении фрикционного ролика 22 трубка 21 совершает вращательное и возвратно-поступательное движение, чем обеспечивается раскладка наматываемой пряжи на патрон, удерживаемый механизмом 2 его захвата и установки в паковкодержатель, находящимся в данный момент в положении выстоя. При этом всегда сохраняется зазор между патроном и свободным концом трубки с зажимными губками.
Далее кулиса 12 начинает возвращаться в свое исходное основное положение, посредством чего пряжа затягивается на патроне. В результате прерывания датчиком электрического сигнала поворотная губка 33 отводится пружиной 46 от неподвижной губки 32 и освобождает конец пряжи. Затем конечный выключатель 26 возвращает стержень 27 в исходное положение, в котором он располагается в выемке фрикционного ролика 22, фиксируя его и трубку 21 от поворота.
Механизм 2 захвата и установки патрона возобновляет свое движение в сторону паковкодержателя, освобождает паковку из него, сбрасывает ее на отводной ленточный транспортер и устанавливает в паковкодержатель патрон с начальными витками пряжи на нем, после чего паковкодержатель зажимает патрон и перемещается в зону намотки пряжи.
Произведем синтез технического решения устройства нахождения и отматывания конца пряжи на бобине, предназначенного в основном для установки в автоприсучальщике пряжи для пневмопрядильной машины путем выбора альтернативных вариантов в морфологической матрице. При этом число параметров в данной матрице сокращается. Отметим, что при использовании максимально конкретизированной и расширенной матрицы многие ее параметры могут оказаться не востребованными.
Составим описание выбранного технического решения.
Сущность технического решения морфологической матрицы проектируемого устройства, представленной на рис. 23, поясняется чертежами, где на рис. 24 изображена общая схема устройства; на рис. 25 – вид А по рис. 24; на рис. 26 – механизм реверса; на рис. 27 – положение мостика механизма реверса относительно ведущей звездочки; на рис. 28 – валик механизма реверса для отматывания пряжи с бобины; на рис. 29 – вид Б по рис. 28; на рис. 30 – сечение В-В по рис. 29.
Устройство нахождения и отматывания конца пряжи на бобине текстильной машины содержит полый двуплечий рычаг 1, зафиксированный в неподвижной опоре 2, с установленным на его глухом конце роликом 3, находящимся посредством пружины 4 во фрикционном контакте с кулачком 5. В направляющем продольном пазу 6 рычага 1 установлен ролик 7, смонтированный на глухом конце подвижной направляющей 8 и находящийся посредством пружины 9, закрепленной на направляющей 8, во фрикционном контакте с кулачком 10. Последний связан цепной передачей посредством ведущей звездочки 11, размещенной в неподвижной опоре 2, с ведомыми звездочками 12 и 13, зафиксированными на его оси. Ведомая звездочка 13 связана цепной передачей с ведомой звездочкой 14, установленной на оси кулачка 5.
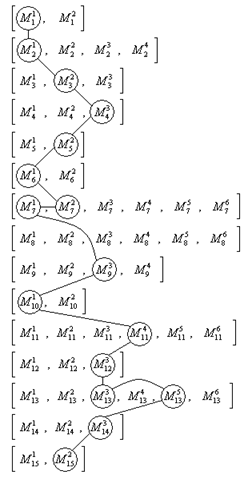
Рис. 23. Морфологическая матрица технического решения проектируемого устройства

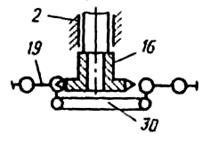
Рис. 27. Положение мостика механизма реверса
На рычаге смонтирован механизм реверса 15, содержащий ведущую звездочку 16, консольно установленную в неподвижной опоре 2. Вокруг звездочки 16 симметрично расположены направляющие 17 и 18, определяющие положение цепи 19, связывающей направляющие звездочки 20 и 21, натяжные звездочки 22 и 23, расположенные в подвижных опорах 24 и 25 соответственно, с ведомой звездочкой 26. Подвижный шток 27 механизма реверса 15, расположенный в глухом отверстии подвижной направляющей 8, снабжен ![]() -образным рычагом 28, в котором установлена ведомая звездочка 26, и компенсирующей пружиной 29. В замкнутый контур цепи 19 введен мостик 30, представляющий собой звено с шагом, большим наружного диаметра ведущей звездочки 16.
-образным рычагом 28, в котором установлена ведомая звездочка 26, и компенсирующей пружиной 29. В замкнутый контур цепи 19 введен мостик 30, представляющий собой звено с шагом, большим наружного диаметра ведущей звездочки 16.
В ![]() -образном рычаге 28 с опорной поверхностью для гибкой оболочки, выполненной в виде дуги окружности, смонтирован валик 31 для отматывания конца пряжи с бобины, состоящий из секторов 32, имеющих гибкую, эластичную перфорированную оболочку, соприкасающийся с бобиной 33. Радиальная поверхность секторов имеет форму канавки шкива, при этом толщина одной из торцовых стенок 34 валика 31, обращенная к машине, превышает толщину ее оболочки.
-образном рычаге 28 с опорной поверхностью для гибкой оболочки, выполненной в виде дуги окружности, смонтирован валик 31 для отматывания конца пряжи с бобины, состоящий из секторов 32, имеющих гибкую, эластичную перфорированную оболочку, соприкасающийся с бобиной 33. Радиальная поверхность секторов имеет форму канавки шкива, при этом толщина одной из торцовых стенок 34 валика 31, обращенная к машине, превышает толщину ее оболочки.
Для передачи конца пряжи следующему исполнительному органу валиком 31 для отматывания пряжи с бобины 33 устройство снабжено направляющим лотком 35.
Устройство работает следующим образом.
Полый двуплечий рычаг 1 из крайнего нижнего положения поворачивается вокруг неподвижной опоры 2 в крайнее верхнее положение посредством ролика 3, находящегося во фрикционном контакте за счет пружины 4 с кулачком 5. В то же время подвижная направляющая 8 выдвигается из рычага 1 посредством перемещения ролика 7, находящегося во фрикционном контакте за счет пружины 9 с кулачком 10, вдоль направляющего продольного паза 6. Кулачки 5 и 10 приводятся в движение посредством цепных передач от ведущей звездочки 11 к ведомым звездочкам 12, 13, 14. Механизм реверса 15 получает движение от ведущей звездочки 16, консольно установленной в неподвижной опоре 2. При выдвижении подвижной направляющей 8 валик 31 отматывания пряжи с бобины 33 вступает с наработанной бобиной, предварительно приподнятой над поверхностью мотального вала, во фрикционный контакт. При этом поверхность сектора 32 за счет имеющийся возможности перемещения подвижного штока 27 в глухом отверстии направляющей 8 при помощи компенсирующей пружины 29 плотно прижимается к поверхности бобины. Валик 31 получает вращение от ведущей звездочки 16 через направляющие звездочки 20 и 21 и натяжные звездочки 22 и 23 посредством цепи 19, в замкнутый контур которой введен мостик 30, передающий движение ведомой звездочке 26, установленной так же, как и валик 31 в С-образном рычаге 28. При этом гибкая оболочка сектора 32 валика 31 за счет перфорации и компенсирующей пружины 29 подсасывает конец пряжи и заставляет бобину 33 вращаться в сторону, противоположную вращению валика 31, происходит сматывание пряжи с бобины 33 и наматывание ее на поверхность валика 31. Поскольку сектор 32 имеет форму канавки шкива, гибкая оболочка охватывает и торцовую поверхность бобины 33, улавливая с нее конец пряжи. Возникновению фрикционного контакта по всей соприкасающейся поверхности между валиком 31 и бобиной 33 способствует то, что гибкая оболочка сектора 32 зажимается между бобиной и опорной поверхностью С-образного рычага 28. При наматывании определенной длины пряжи на валик 31 последний изменяет направление своего вращения, потому что звездочка 16 «проскакивает» в мостик 30, имеющий шаг больше ее наружного диаметра. Мостик 30 оказывается с противоположной стороны звездочки 16, и направление движения цепи 19 изменяется. Направляющие 17 и 18 служат для определения положения цепи 19 при «проскакивании» звездочки 16 в мостик 30, а подвижные опоры 24 и 25 – для поддержания натяжения в цепи 19 при изменении ее длины в процессе выдвижения подвижного штока 27. При изменении направления вращения валика 31 подвижная направляющая 8 задвигается, при этом фрикционный контакт с бобиной 33 разрывается, и она перестает вращаться. Пряжа сматывается с валика 31 и посредством возвращения рычага 1 в крайнее нижнее положение и направляющего лотка 35 передается следующему исполнительному органу.
Сущность технического решения морфологической матрицы проектируемого механизма, представленной на рис. 31, поясняется чертежами, где на рис. 32 изображен общий вид устройства; на рис. 33 – вариант исполнения ползуна устройства.
![]() Рис. 31. Морфологическая матрица проектируемого механизма
Рис. 31. Морфологическая матрица проектируемого механизма
Механизм для воспроизведения сложного профиля содержит основание 1, установленные на нем два кулачка 2 и 3, взаимодействующие с ними толкатели и ведущий кривошип 4. Последний установлен на основании 1 в подшипниках 5 и связан с приводным элементом 6. Кулачки 2 и 3 зафиксированы. Один из толкателей выполнен в виде ползуна 7, установленного на ведущем кривошипе 4 с возможностью возвратно-поступательного перемещения, подпружиненного пружиной 8 относительно него и имеющего две оси 9 и 10, перпендикулярные оси ведущего кривошипа 4. На оси 9 с возможностью вращения установлен ролик 11, предназначенный для взаимодействия с кулачком 2. Второй толкатель выполнен в виде двуплечего рычага 12, установленного с возможностью вращения на оси 10 ползуна 7 и связывающего двуплечий рычаг и кулачок 3, выполненный торцовым и имеющий направляющую канавку. Для взаимодействия с последней на одном конце двуплечего рычага 12 через пружину 13 и ось 14 установлен завальцованный шарик 15. Другой конец двуплечего рычага предназначен для связи с рабочим органом.
С целью сокращения габаритов механизма ползун 7 может быть выполнен в виде стакана и подпружинен двумя пружинами 8 и 16. Расположение пружины 16 внутри пружины 8 позволяет увеличить жесткость последней, не изменяя ее габаритов.
Механизм работает следующим образом.
При вращении ведущего кривошипа 4 вокруг кулачка 2 ролик 11 и ползун 7 перемещаются вдоль его оси. Вследствие этого изменяет свое положение двуплечий рычаг 12. Одновременно последний совершает поворот вокруг своей оси, обусловленный взаимодействием, закрепленного на одном из его концов шарика с направляющей канавкой, выполненной на торцовом кулачке 3. В результате установленный на другом конце двуплечего рычага рабочий орган совершает сложное движение. Согласование переменного радиуса кривизны поверхности кулачка 2 и формы линии направляющего торцового профиля кулачка 3 дает возможность получения разнообразных форм траекторий рабочего органа.
Отметим, что на основе разработанной морфологической матрицы было выявлено еще несколько технических решений автосъемника бобин для пневмомеханических прядильных машин.

0 комментариев